基于头皮和表面肌电信号假手控制系统
2011-03-20吕俊
吕俊
(广东工业大学自动化学院,广东广州510006)
手部运动参数的预测是实现假手控制的难点[1]。目前,基于手部运动参数预测的假手控制系统主要有两种:(1)通过分析残肢肌肉所发放的动作电位,提取反映手部运动意愿的有效特征,从而建立特征向量与手部运动参数之间的映射关系来实现控制功能,该系统受到肌电解码能力的限制,控制假手运动的自由度不高[2-3]。(2)植入电极记录大脑[4]或者上肢的神经信号[5-8],并预测手部运动参数,该系统使用自然,控制效果好,但有手术风险,且不易维护。
为克服现有技术存在的缺点和不足,提出一种假手控制系统。该系统无需植入电极采集大脑或者上肢的神经信号,而是综合利用头皮电(EEG,Electroencephalograph)信号和表面肌电(SMG,Surface Electromyography)信号的信息,对手部运动参数进行解码。
1 系统结构
该假手控制系统包括:信号采集模块、反馈模块、数据存储模块、数字信号处理模块、主控模块和驱动模块。系统功能结构,如图1所示。信号采集模块负责记录EEG和SEMG,将它们放大并转换为数字信号,然后传给主控模块;反馈模块用于帮助患者进行训练。该模块提供图形用户界面,让患者控制假手跟踪一个引导球的连续运动,引导球的运动参数预先保存在数据存储模块,测试时,反馈模块从主控模块获取跟踪过程中假手的运动参数,并依据该参数在图形用户界面上显示相应的假手运动,使患者能及时了解控制假手进行跟踪运动的效果,以便患者更快地适应假手控制系统;数据存储模块用于存储EEG和SEMG信号、特征向量、引导球运动参数、假手运动参数以及回归模型参数;数字信号处理模块负责对EEG和SEMG进行多频带滤波、提取特征向量、训练回归模型参数以及预测手部运动参数,并将训练好的回归模型参数和实时预测的手部运动参数传给主控模块;驱动模块从主控模块获取已预测的手部运动参数来驱动假手运动;主控模块负责协调和管理信号采集模块、反馈模块、数据存储模块、数字信号处理模块和驱动模块。
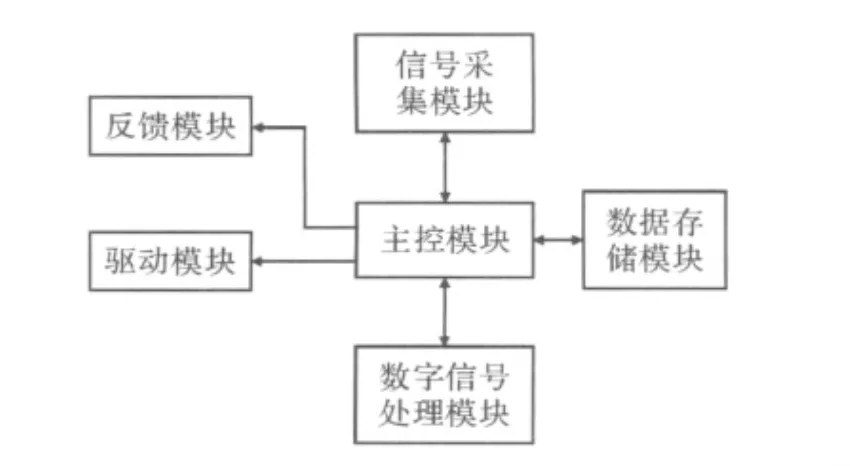
图1 假手控制系统
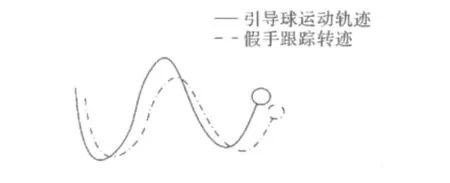
图2 反馈模块的图形用户界面
具体来说,数字信号处理模块包括:用于对EEG和SEMG进行多频带滤波的预处理模块;用于计算各频带EEG和SEMG信号幅值或功率的特征提取模块;用于学习回归模型参数的训练模块;用于将测试数据集内EEG和SEMG的特征代入回归模型、以预测手部运动参数的预测模块;用于将学习好的回归模型参数或预测所得的手部运动参数传送给主控模块的结果输出模块。其工作流程如图3所示,在训练时,所述预处理模块、特征提取模块、训练模块、结果输出模块依次连接;在测试时,所述预处理模块、特征提取模块、预测模块、结果输出模块依次连接。
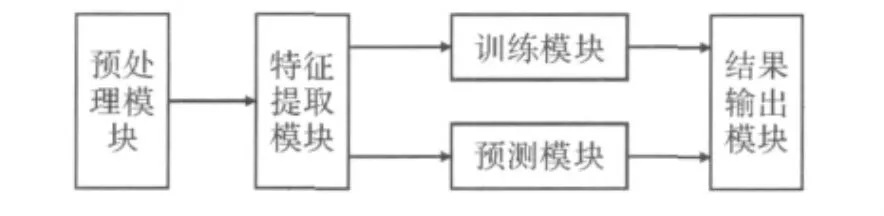
图3 数字信号处理模块的流程
2 硬件实现
数字信号处理模块设有DSP芯片及相应的DDR内存、Flash芯片等外围器件,Flash芯片用于固化回归模型参数学习算法和手部运动参数预测算法,DDR内存用于实现数据运算。数据存储模块可由串口硬盘实现;信号采集模块中用于记录EEG的电极有8个,分别粘贴在左右脑头皮的前运动区、主运动区、感觉运动区和后顶骨区。用于记录SEMG的电极有2个,分别粘贴在尺侧腕伸肌和尺侧腕屈肌外皮肤表面。信号采集模块还包括模拟信号放大器和采样器。所述反馈模块可由LED显示器实现。所述驱动模块包括可编程步进电动机控制器和步进电动机驱动器,控制假手按照预测的运动参数动作。所述主控模块可由现场可编程逻辑阵列(FPGA,Field Programmable Gate Array)实现;采用ARM内核或PPC内核,用于控制和管理信号采集模块、数字信号处理模块、数据存储模块和驱动模块。上述信号采集模块、反馈模块、数字信号处理模块、数据存储模块及驱动模块,均通过主控模块实现接口适配。
3 控制方法
假手控制系统的控制方法,包括以下步骤:
(1)系统启动后,主控模块负责调度并完成数据存储模块、反馈模块、数字信号处理模块、信号采集模块和驱动模块的自检。
(2)主控模块从数据存储模块中调出预设的引导球运动参数,将其传给反馈模块。
(3)反馈模块将引导球的运动显示在图形用户界面上,提示患者使用EEG和SEMG控制假手跟踪引导球运动,然后判断是否为训练状态。
如果是训练状态,则执行步骤为:1)主控模块接收来自信号采集模块的EEG和SEMG数据,将它们与引导球运动参数对应起来,生成训练数据集,并保存在数据存储模块。2)经过一定量的训练,数字信号处理模块从数据存储模块中调用训练数据集,先通过预处理模块对EEG和SEMG进行多频带滤波;然后通过特征提取模块计算各频带EEG和SEMG的幅值或功率特征;接着通过训练模块,学习回归模型参数;最后将学习好的回归模型参数传给主控模块。3)主控模块将学习好的回归模型参数存入数据存储模块。
如果不是训练状态,则执行步骤为:1)主控模块先从数据存储模块中调出已学习好的回归模型参数,将其传给数字信号处理模块;然后接收当前来自信号采集模块的EEG和SEMG数据,将它们传给数字信号处理模块。2)数字信号处理模块接收已学习好的回归模型参数和当前待预测的EEG和SEMG,先通过预处理模块对EEG和SEMG进行多频带滤波;然后通过特征提取模块计算EEG和SEMG在各频带的幅度或功率特征,接着通过预测模块,将EEG和SEMG的特征代入回归模型,估计相应的手部运动参数,并将其传给主控模块。3)主控模块将已预测的手部运动参数传给驱动模块,控制假手运动;将引导球运动参数、预测的手部运动参数传给反馈模块。4)反馈模块依据引导球运动参数和预测的手部运动参数,将引导球的运动和假手的跟踪运动同时显示在图形用户界面上。
4 结束语
提出了一种假手控制系统,以EEG和SMG作为信号源,采集方便、成本低廉、无手术风险;具有可视的反馈模块,实时反映患者对假手的控制状态,便于患者适应和掌握;数据处理能力强、预测速度快、控制灵活,而且便于维护和升级。
[1] WALDERT S,PISTOHL T,BRAUN C,et al.A review on directional information in neural signals for brain-machine interfaces[J].J.Physiol(Paris),2009,103(6):244-254.
[2] 杨广映,罗志增.肌电信号的功率谱分析方法[J].传感技术学报,2004,9(3):355-358.
[3] 罗志增,王人成.基于表面肌电信号的前臂手部多运动模式识别[J].仪器仪表学报,2006,27(9):996-999.
[4] PISTOHL T,BALL T,SCHULZE B A,et al.Prediction of arm movement trajectories from ECoG recordings in humans[J].J.NeurosciMethods,2008,167(9):105-115.
[5] 张晓文,高忠华,胡天培,等,神经信号控制假肢研究[J].中国生物医学工程学报,2005,24(5):624-628.
[6] 李志伟,徐汀荣.数字化动态脑电地形图系统的应用研究[J].现代电子技术,2005(12):29-30,32.
[7] 苗露,曹炜,王爱林,等.基于肌音信号的仿生手信号采集系统设计[J].现代电子技术,2010(9):144-148.
[8] 周兵,纪晓亮,张荣,等.基于嵌入式技术的表面肌电信号采集仪设计[J].现代电子技术,2010(6):63-65,72.
