双CCD交汇测量高速弹丸落点坐标设计研究
2011-03-16靳田保郝晓剑周汉昌
靳田保,郝晓剑,周汉昌
(中北大学 电子测试技术国防科技重点实验室,山西 太原 030051)
0 引言
双CCD交汇测量技术是远距离激光高速扫描光电测量技术,在对远距离和大视场的空间目标进行定位测量中显示出独特的优越性,因此在目标的追踪测量中有极其广泛的应用。双CCD测量技术作为空间定位装置,首要的问题就是如何能够提高测量的精确度。影响坐标精确度的原因很多,但是究其主要因素是光斑中心位置的精确确定。光斑的中心的确定将直接影响图像中心位置的确定,进而影响光斑中心的确定。
本文设计双CCD构建的光斑中心空间定位的系统结构,并给出光斑中心坐标的计算公式。通过对不同落点的多次测量计算,并与实际坐标比对,计算分析误差。
1 测试系统与数学建模
1.1 测试方案
测试的总体方案如图1所示,激光转镜式高速扫描系统扫描被测区域的目标点,并且将激光能平稳地打在被测的物体上。双CCD在同步触发电路的作用下高频率采集图像,并将所筛选的目标图像传送至终端进行计算分析。
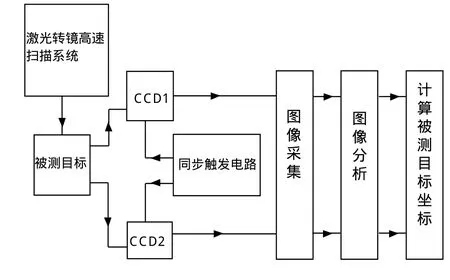
图1 双CCD交汇测量系统框图
1.2 高速扫描系统
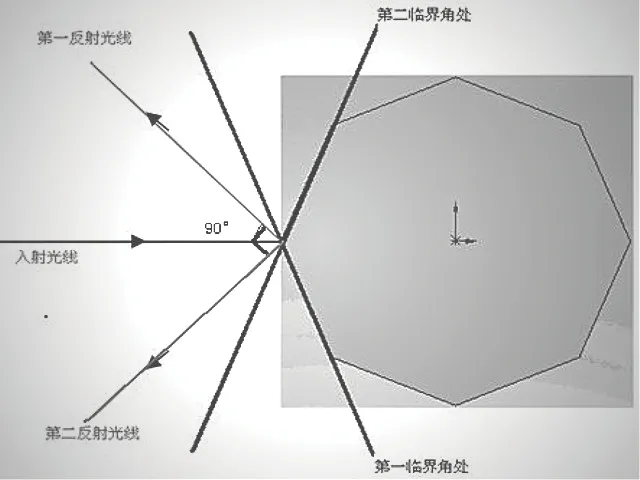
图2 八棱柱反射光路图
本方案中的高速扫描系统是利用激光器照射在恒定高速旋转的棱柱上,利用高速旋转的棱柱镜面将激光反射后达到高速扫描被测区域的目的。图2为高速扫描系统棱柱的俯视图,该系统中棱柱为八棱柱,其侧面与低端面的夹角为60°。图3所示当激光以与水平面为60°夹角照射在棱柱上,光线将以与水平面夹角为0°且视场角为90°的光路扫描被测区域。

图3 高速扫描系统设置图
1.3 数学建模
在平行于水平面的平面内放置两台CCD相机,使其主光轴的交汇点与被测区域的几何中心重合。根据水平校准将两台CCD相机的水平光轴平行于被测平面,且光轴的交汇点与被测平面的几何中心重合。两相机视场的交汇部分形成有效靶区,根据相机的视场角来确定相机与被测区域几何中心的距离。当弹丸飞过有效靶区,外触发相机工作,经图像采集、软件处理,可获得弹体过靶的坐标位置,从而得出弹体的落地点坐标。
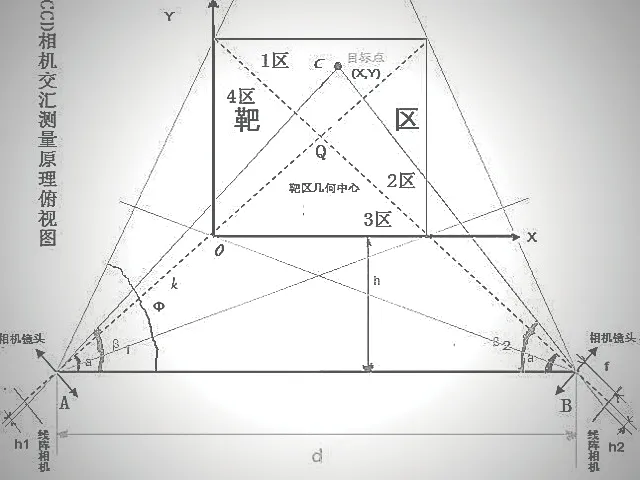
图4 物象坐标关系
以400m×400m的正方形被测区域为基准建立直角坐标系如图4,O为坐标原点,C为弹着点,其坐标为(X,Y)。第一台线阵相机放置于A,第二台线阵相机放置在距第一台相机d处的B点,Q为两套光学系统的光轴交点,AQ,BQ分别为两套光学系统的光轴。AQ,BQ与X轴的夹角均为45°,设成像位置距光轴的距离分别为h1,h2。AC与水平的夹角为 1,BC与水平的夹角为 2,光学系统的焦距为 f,基线与有效靶区底边的距离为h。根据相机的拍摄角度,确定相机与扫描区域的O点的距离k。CCD相机的角度为Φ,相机传感器尺寸22.9*22.9mm则:

规定CCD1中的h1相片中心为0,左h1为负;规定CCD2中的h2相片中心为0,右h2为负。

根据上式,只要知道已有参数光学系统焦距f,测出基线长d,角度量 和 以及测得参数像距h1和h2,(h1,h2为物象在传感器上的大小)便可确定靶面内任意一点C的坐标(X,Y)。
2 实验数据分析
在测量过程中由于CCD的内部参数和系统的结构难以准确测量,因此必须在测量过程中重新现场标定。本实验采用水平坐标台来控制光斑的具体坐标。经过标定结构参数焦距f=28mm,d=737m,Φ=1.3089rad,k=85.80m利用标定后的测试系统,对光斑坐标进行测量,测量以及误差数据如表1所示。

表1 被测目标坐标及精度
3 结论
利用双CCD相机交汇测量,设计了一个模拟双目定位系统。通过数学建模实现了激光光斑的中心坐标定位。依据灰度重心法实现了光斑中心的精确定位,而且从测试的结果可以看出测试误差小,精度高。
[1] 张林.双CCD光靶交汇测量技术以及应用研究[J].兵器科学与技术, 2008.
[2] 郝晓剑,郝丽娜,周汉昌,杜惠杰.轻武器命中精度测量方案探索[J].火炮发射与控制学报,2007.
[3] 张宇.提高CCD空间定位精度的两种方法[J].光电子激光,2003,14(10):1118-1120.
[4] 杨华勇,吕海宝.双CCD交汇测量系统结构参数的优化设计[J].光学技术,2001,27(4):34.
[5] 黄玮,孙世维.线阵CCD交汇测量精度分析[J].光学精密工程,1955,3(3):95-99.
[6] 张智辉,田地,杨义先.线阵CCD驱动电路设计的几种方法[J].仪表技术与传感器,2004(6):32-34.
[7] 马德林.CCD光学定位仪布靶方法的改进[J].兵器试验,1995,(2):9-11.
[8] 王庆有.CCD应用技术[M].天津:天津大学出版社,2002.