胸鳍扑翼式机器鱼的设计及水动力实验
2011-03-15毕树生蔡月日
高 俊 毕树生 李 吉 蔡月日
(北京航空航天大学 机械工程及自动化学院,北京 100191)
胸鳍扑翼式机器鱼的设计及水动力实验
高 俊 毕树生 李 吉 蔡月日
(北京航空航天大学 机械工程及自动化学院,北京 100191)
提出了一种基于胸鳍拍动推进的仿生机器鱼的设计模型,并对其进行了水动力实验研究.首先根据仿生对象的胸鳍运动和结构特点设计了由直流伺服电机驱动的扑翼式机器鱼,然后设计了推力测试实验装置,在北京航空航天大学机器人所的低速水洞中完成了机器鱼的推力和功耗测试实验,获得了推力系数和效率随Sr(斯特劳哈尔数)变化的曲线.实验结果表明最大推力系数和效率都在Sr=0.4时达到,该结果与前人关于游动和飞行生物保持高效推进时Sr的范围一致.机器鱼的自由航行实验进一步验证了水洞测力实验结果,最大航行速度可达0.64m/s,约1.5倍身长比,相比国内外的同类仿生机器鱼具有较大的速度优势.实验结果表明:该仿生设计模型可以很好地模拟牛鼻鲼的推进方式,较大提高胸鳍扑翼式机器鱼的速度,为仿生水下航行器的设计提供了一种思路.
仿生;机器鱼;推进
鱼类和海洋哺乳动物经过几亿年的进化具备了非常出色的水下运动能力,不仅可以在长时间的巡游时保持低能耗、低噪声,同时也表现出良好的机动性.一直以来,人们都在积极探索鱼类高效游动的机理,希望从仿生工程领域研发出仿鱼类游动的水下机器人.
从20世纪90年代开始,对仿生机器鱼的研究成为了水下机器人研究领域的一个热点.最初,研究人员认为身体/尾鳍(BCF,Body and/or Caudal Fins)推进模式优于其他推进模式,尤其是月牙尾推进模式被认为是效率最高的推进模式[1],所以对仿鱼推进机器人的研究主要集中在BCF模式,而对中间鳍/对鳍(MPF,Median and/or Paired Fins)模式的研究较少.生物的进化是一个经过自然选择整体功能不断完善的过程,是在适应生存环境、捕食习惯之后整体的功能趋于最优.通过对MPF模式中的胸鳍推进的研究,人们发现胸鳍推进模式除了在效率、机动性方面表现优异,在隐蔽性方面表现特别突出[2].
采用MPF模式的硬骨鱼类的中间鳍或者对鳍一般是作为辅助推进方式,比如转弯或者稳定性控制等,而软骨鱼类采用胸鳍作为推力的主要来源,通过胸鳍的波动或者拍动产生推力.根据文献[3]研究可知,软骨鱼类-鳐鱼和牛鼻鲼分别采用了不同的胸鳍运动方式:波动方式和拍动方式.在波动方式中,推进波沿着胸鳍从前向后传递产生推力,胸鳍波动幅度较小,胸鳍上分布多个波;在拍动方式中,胸鳍像鸟类的翅膀一样上下拍动,拍动幅度较大,胸鳍上分布不到半个波.本文主要以牛鼻鲼为仿生对象,机器鱼采用胸鳍拍动推进模式.
对于胸鳍推进机器鱼,国内外研究较多的是长鳍波动推进模式和对鳍波动推进模式[4].近年来,人们开始关注胸鳍拍动推进模式,并将各种新型智能材料应用于胸鳍拍动机器鱼的研究[5-8].从目前的实验结果来看,由于新型智能材料在控制精度、响应速度上的一些不足限制了以其作为人工肌肉驱动器的机器鱼的整体性能,导致推进速度都比较小.为了更方便灵活控制胸鳍拍动,有些研究人员使用伺服电机作为驱动器.文献[9]使用了8台伺服电机(左右各4个)驱动胸鳍拍动,研制了牛鼻鲼-Ⅰ号机器鱼,可以较快地前进、后退和原地转弯,最快前进速度可达0.13m/s,后退速度可达0.15m/s,8 s内完成原地转弯.北京航空航天大学机器人所2007年研究了第1代仿生扑翼式机器鱼(BHRay-Ⅰ),单电机驱动曲柄摇杆机构形成两侧胸鳍的同步拍动,最终实现最快速度0.7m/s,约1.4倍身长比;2009年研制了第2代样机(BHRay-Ⅱ),两侧胸鳍独立控制,可以实现异步拍动,模拟牛鼻鲼的转弯动作,转弯较第1代样机更为灵活.
目前对于胸鳍拍动推进机器鱼的研究主要集中在模拟软骨鱼的胸鳍运动方式以及运动学参数(游动速度、扑翼频率、幅度、相位差)的测量,有关水动力学特性(推力系数、功耗)的研究相对比较缺乏.为了研究胸鳍拍动模式的水动力特性,本文在BHRay-Ⅰ和BHRay-Ⅱ的基础上,从仿生的角度出发研制了新一代的仿牛鼻鲼机器鱼,并在北京航空航天大学机器人所的低速水洞进行了推力和功耗测试实验.最后,为了验证机器鱼的游动性能,在水池中完成了自由航行实验,并与国内外的胸鳍拍动推进机器鱼进行了比较.
1 胸鳍扑翼推进机制
牛鼻鲼主要通过一对宽大的胸鳍上下拍动产生推力,胸鳍拍动跟鸟类扑翼运动很相似,鸟类通过翅膀上下拍动产生升力和推力,牛鼻鲼主要通过胸鳍拍动产生推力.
文献[10-11]提出了鸟类飞行的机理:鸟类翅膀拍动时会产生一个有效攻角α,从而产生升力和推力,称为Knoller-Betz效应,如图1所示.
文献[12]从理论上给出了Knoller-Betz效应的解释:当振动频率较小时,脱落的尾涡形成卡门涡街,产生阻力,当振动频率增大时,脱落的尾涡形成反卡门涡街,其尾迹以射流的形式向后射出由此产生推力.通过实验发现,NACA0015翼型在流体中升沉(heaving)或者俯仰(pitching)运动都能够产生推力[13].后来,文献[14]在对鱼类尾鳍推进的研究中发现无量纲参数Sr对尾涡的形式起着决定性的作用,并通过实验和生物观测指出在区间0.2<Sr<0.4,推进力和推进效率的综合性能表现最优,当Sr太小时,效率高但是推力系数过小不能产生有效推进,而Sr太大时,推力系数大但是效率很低[15].文献[16]将该研究结果从水中游动生物延伸到空中飞行生物(包括鸟、蝙蝠、飞蛾等),指出飞行生物在高效运动时的Sr也集中在一个狭窄区间0.2<Sr<0.5,并通过扑翼运动(root-flapping)的流场显示实验验证了扑翼运动与二维翼的升沉和俯仰振动产生的流场非常相似.
根据以上生物学和振动翼研究的结果,可以归纳出振动翼产生推力的基本机理如下:
1)基于Knoller-Betz效应,振动翼的升沉和俯仰运动产生推力;振动翼的升沉和俯仰运动实际上就是控制尾涡脱落形式,使其从卡门涡街形式变成反卡门涡街形式,从而产生推力;
2)振动翼的无量纲运动参数Sr直接决定着尾涡脱落形式:Sr过小,尾涡呈卡门涡街形式,产生阻力;当0.2<Sr<0.5时,尾涡呈反卡门涡街,尾涡形成射流产生推力,此时效率最高.
牛鼻鲼的胸鳍拍动可以简化为振动翼基本模型,因此其推进机理归结如下:胸鳍上下拍动,同时沿弦向柔性变形,产生类似于刚性振动翼的升沉和俯仰运动,从而控制尾涡脱落形成反卡门涡街,产生推进力.
2 样机模型
2.1 仿生设计
牛鼻鲼出生时一般为28~46 cm宽,一条成年牛鼻鲼可以长到110 cm以上.为了消除因为牛鼻鲼个体差异造成的尺寸不同,本文提取牛鼻鲼的身体轮廓线,然后按照比例设计机器鱼的结构外形,如图2所示.

图2 牛鼻鲼和仿牛鼻鲼机器鱼
为了研究牛鼻鲼胸鳍的运动特征,实验小组去北京海洋馆采集了牛鼻鲼的游动视频,从视频中选取牛鼻鲼匀速游动时一个周期内胸鳍上下拍动的图片帧,采用Matlab软件对每帧图片进行胸鳍外缘曲线提取,如图3和图4所示,图中坐标以胸鳍上拍幅度作为标准单位1进行归一化.从图中可以发现牛鼻鲼游动时胸鳍的运动规律:
1)在拍动过程中胸鳍前缘相位始终领先后缘,推进波沿弦向由前向后传播;
2)前缘曲线靠近胸鳍根部的部分弯曲变形很小,而靠近末端的部分弯曲变形很大,胸鳍沿展向从根部到末端柔性逐渐变大.
以上运动特点是由牛鼻鲼特有的胸鳍结构决定的,根据文献[17]对软骨鱼的解剖研究可知,该类软骨鱼的胸鳍骨架由许多软骨骨节组成,其主要特点可以归纳如下:
1)软骨辐条沿根部向外缘呈辐射状,软骨骨节的表面钙化大大提高了胸鳍沿展向的刚度;但同时因为每根软骨辐条由很多骨节组成,可以绕关节小幅度转动,所以在展向又保持了一些柔性;
2)胸鳍骨骼在靠近前缘和根部的区域表面钙化程度很大,同时相邻软骨辐条沿弦向由骨间组织(cross-bracing)交错连接,大大提高了胸鳍的弦向刚度,因此胸鳍拍动过程中胸鳍上的波不超过半个;胸鳍靠近根部和中间的区域表现出较明显的刚性,只在胸鳍末梢和尾缘保持一定的柔性.该特点也是扑翼推进与波动推进软骨鱼类在胸鳍结构上最根本的区别.
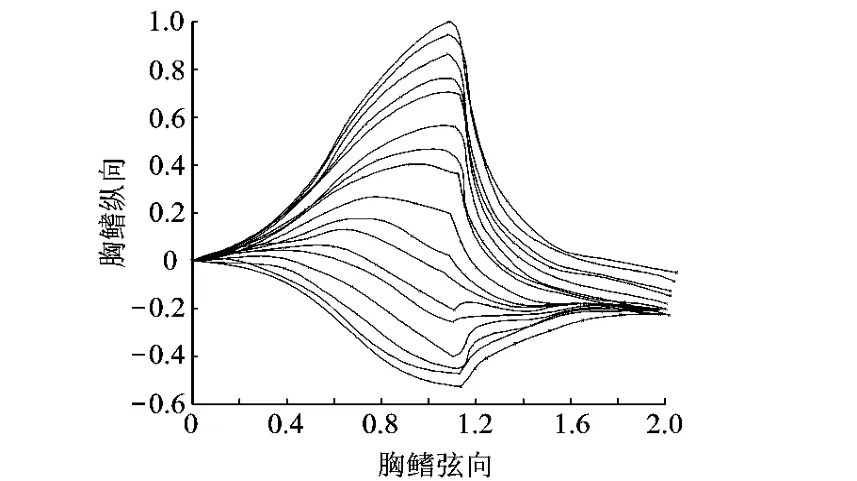
图3 胸鳍上拍运动规律(侧视图)
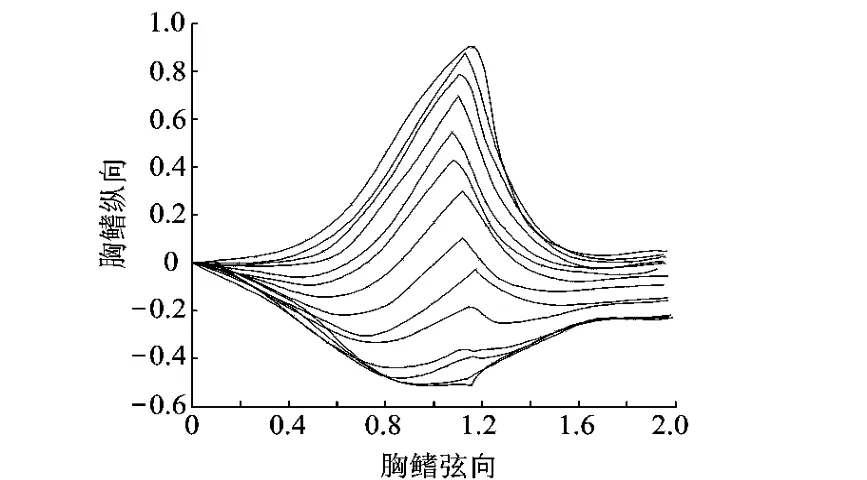
图4 胸鳍下拍运动规律(侧视图)
从前人对于扑翼式机器鱼的研究来看,胸鳍的升沉运动都是通过电机或者人工智能材料来直接驱动,而弦向的俯仰运动则是通过多自由度驱动器的主动控制来实现,但是从目前实现的效果来看,推进效果并不好.为此,本文从生物的柔性身体特点得到启发,鱼类柔性的身体在流体作用力下会产生被动变形,该变形既有利于储存能量又有利于产生弦向的俯仰运动.另外,鱼类对躯体的主动控制主要还是根据水中的涡流来调整身体的变形方向和幅度,从而利用水中的流体能量为自己提供动力,大大降低功耗.现阶段人们对于仿生机器鱼的研究受到瞬时流场动力检测手段的限制,还不能达到根据流场变化实时控制身体变形方向和幅度的程度,因此目前对弦向变形的主动控制主要还是周期性的重复运动,跟鱼类根据流场变化主动控制身体变形还是存在较大区别.如果主动控制的弦向变形与流场的变化不一致,还有可能导致非常大的阻力,从而达不到控制弦向变形以产生推进力的目的.基于以上两个原因,本文提出了一种被动变形的柔性扑翼模型:刚性前缘扑翼运动结合柔性胸鳍被动变形构成胸鳍的升沉和俯仰运动,电机直接驱动胸鳍刚性前缘上下拍动完成升沉运动,而柔软的胸鳍在流体动力和惯性力的作用下产生被动变形完成俯仰运动.这种模型利用材料的柔性,使得胸鳍在扑翼时随着流场压力的变化而变形,可以一定程度上模拟鱼类柔软身体在游动时的被动变形,而且控制简单,实现方便.
基于以上分析,本文设计了仿生柔性胸鳍,如图5所示.胸鳍材料是1mm厚的硅橡胶板,具备良好的柔性,胸鳍前缘和根部是1mm厚的低密度高强度碳纤维板,以增强展向和弦向刚度.前缘的碳纤维板设计成宽度渐变形式,抗弯刚度沿展向逐渐变小.
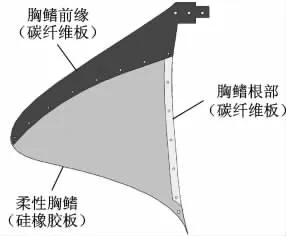
图5 仿生胸鳍设计
2.2 总体结构
机器鱼的总体结构如图6所示.
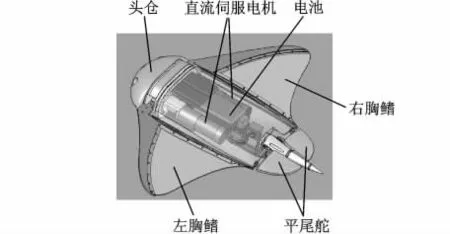
图6 机器鱼结构图
机器鱼左右胸鳍通过两个60W的直流伺服电机驱动,伺服电机对称安装在鱼体中心平面的两侧,电机转动通过减速器、联轴器输出到胸鳍.两个舵机分别通过连杆驱动平尾舵和方向舵.电源为镍氢电池,电源及控制系统安装在机器鱼体腔上方.机器鱼身体材料采用密度相对较小的玻璃钢.体腔与头仓连接部分采用O型圈静密封方式,而胸鳍电机输出轴和尾舵输出轴采用动密封方式;为了进一步保证密封性,体腔内还充入一定压强的空气.
2.3 控制系统
机器鱼控制系统由两个单元模块组成:多任务规划模块(LPC2114作为控制单元,移植uC/OS-II完成多任务调度)和运动控制模块(Mega128作为控制单元,主要完成电机控制),两模块之间通过TWI(Two-Wire serial Interface)进行实时通讯.多任务规划模块接收来自PC或者无线遥控的指令,然后结合传感器信号生成胸鳍拍动参数(频率、幅度),拍动参数通过TWI发送到运动控制模块,运动控制模块按照拍动参数进行PID(Proportional-Integral-Derivative)闭环控制,实现胸鳍的精确拍动.该控制系统可以灵活调节胸鳍的拍动参数,如频率、幅度、两侧相位差等.
3 水动力实验
3.1 胸鳍拍动运动方程
在本文中,胸鳍的升沉运动通过电机驱动胸鳍绕根部转动来实现,而俯仰运动则是通过胸鳍在流体力作用下的被动变形来实现.胸鳍绕根部的转动方程定义为

式中,ω为拍动角频率;φmax为拍动幅度;φ0为拍动初始角.不同的φ0可以改变胸鳍上合力的方向,为了使一个周期内胸鳍上的平均升力为0,在实验中将φ0设为0.
扑翼运动的 Sr定义[16]为

式中,f为扑翼频率;A为尾涡宽度,因为尾涡宽度不容易测量,所以用胸鳍尾缘的最大位移近似;b为胸鳍展长;U为水流相对速度.
3.2 实验平台
推力和功率测试实验是在北京航空航天大学机器人所的低速水洞中完成的,实验装置如图7所示.
机器鱼安装在推力测试机构底部,推力测试机构固连在支撑滑架上,交流伺服电机通过减速器驱动同步带拖动支撑滑架在导轨上滑动,滑动速度可通过计算机调节,范围为0.05~0.50m/s.
3.3 推力测试机构
为了测量机器鱼的推力,本文设计了一种推力测量机构,如图8所示.推力测量机构由一个平行四杆机构和一个杠杆机构组成.力传感器用的是Tedea-Huntleigh公司的1004全桥应变式力传感器,采用4片应变片组成全桥电路,其量程为1.5 kg,误差0.067%.由于力传感器的输出电压为mV级,在数据采集之前增加了放大电路,以降低信号采集时传输电缆引入的噪声影响.数据采集器为NI公司的DAQPad-6016数据采集器,具有16个通道,这里使用了2个通道,一个用来采集推力,另一个用来采集电机同步方向信号,采样频率为50Hz.通过LabView 8.0 express将采集到的数据进行数字低通滤波处理.
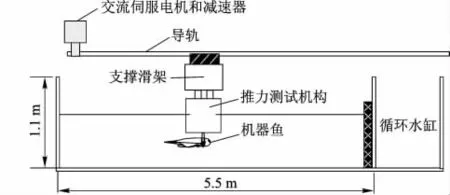
图7 低速水洞实验装置
在试验过程中,左右胸鳍对称拍动,所以机器鱼身体上不产生侧向力,只有升力和推力.如图8所示,将升力和推力向O点简化,得到O点上的两个分力和一个力矩:Ft等于推力,Fl等于升力,M是由于推力和升力作用线与O点的偏距产生的.进一步分析可以得到:
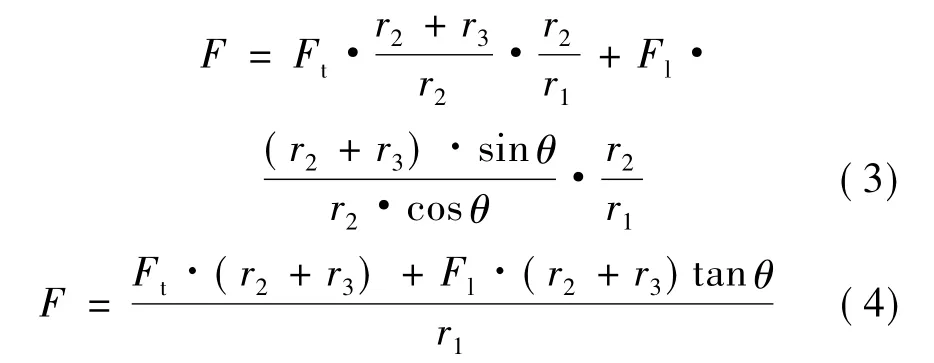
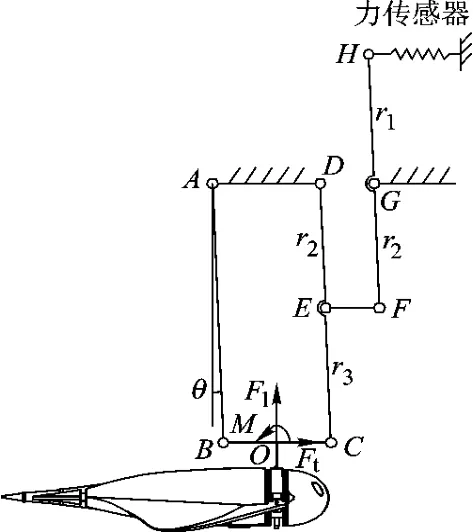
图8 推力测量原理
根据Tedea-Huntleigh1004的使用手册,在最大量程1.5 kg的负载下,传感器的最大变形位移小于0.4 mm,而试验装置的杆长 r1为100 mm,因此:

从式(5)可知传感器上测得的力与作用在机器鱼身上的水平推力成近似线性关系,通过采集到的传感器信号可以计算出作用在机器鱼身体上的水平推力.
为了消除机械安装误差,本文对推力测试系统进行了静态校准实验,在O点加载不同质量的砝码获得传感器输出的不同电压信号,得到关系式:

式中,Fh为作用在测量系统上的力;V为加载后测得的电压值;V0为未加载时测得的电压值.
胸鳍周期性拍动产生的推力会引起测力系统的受迫振动,为了得到推力的准确值,将测力系统简化为二阶阻尼振荡系统,给测力系统施加一个冲击响应,可以得到冲击响应曲线.由此计算出系统的等效阻尼系数为 0.106 9,固有频率为64.89 rad/s(10.33 Hz).将传感器测得的值进行傅里叶级数展开,选取有限项(5项以保证精度)进行曲线拟合,然后根据线性系统叠加原理可以得到推力实际值.
4 实验结果和分析
4.1 身体阻力测量
3.3 节给出的推力测量系统测量的是机器鱼受到的合力,包括胸鳍推力和身体阻力.为了得到胸鳍净推力,将未装有胸鳍的机器鱼安装在测力机构上进行拖动实验,测得身体的阻力,再将胸鳍拍动时产生的总推力减去身体阻力就得到两个胸鳍的合推力.单个胸鳍推力计算过程如下:

式中,Fnet为净推力;Fd为测得的身体阻力,注意Fd为负数.
在速度0.1~0.4m/s的范围内测得的身体阻力系数如图9所示.
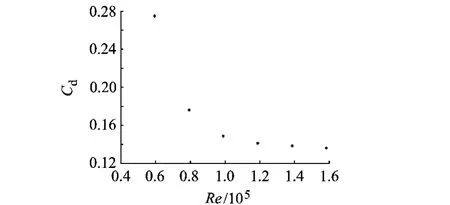
图9 身体阻力系数C d与雷诺数Re的关系
从图9中可以看出,在Re<1.18×105(相应拖动速度小于0.3m/s)时,Cd显著增加,而Re>1.18×105时,Cd变化很小.这其中的原因是:在拖动速度较小时,机器鱼身体产生的阻力很小,由于测力系统在测量较小作用力时相对误差较大,所以导致Cd显著增大.为了消除这个误差影响,本文中的实验都在速度0.3m/s下完成,对应的Re为1.18 ×105.
4.2 推力和效率测量
推力系数Ct定义为
式中,T为振动周期;ρ为流体密度.
推进效率η定义为
式中,P为总功耗.
本文测量的总功耗由有用功、机械损耗、尾迹损耗组成,采用伏安法通过测量电机驱动电压和电流得到总功耗.需要指出的是,本文中提出的效率是指机器鱼的效率,而不是胸鳍单元的效率,目的是为了从工程应用角度来研究本文所设计的机器鱼作为一个整体的推进效率.
4.2.1 Ct与 Sr的关系
Ct与Sr的关系如图10所示.

图10 C t与Sr的关系
根据图10可以分析如下:
1)当拍动幅度小于10°时,Ct基本上都为负或者靠近零点,此时基本上没产生推力;
2)当拍动幅度大于18°时,在0.16<Sr<0.68的范围内,胸鳍都产生了推力,而且随着拍动幅度增大,Ct显著增加;
3)当拍动幅度为14°附近时,胸鳍在部分频率点产生了推力,但是Ct不到0.1,推力效果不是很明显;
4)拍动幅度固定,当拍动频率为1.2 Hz时(对应图10每条曲线的峰值),此时产生的 Ct最大;
5)在所有试验参数中,当Sr=0.4(对应的拍动频率为 1.2Hz,拍动幅度为 30°)时,Ct最大,约为 0.93.
4.2.2 η 与 Sr的关系
η与Sr的关系如图11所示,和Ct与Sr的关系曲线很相似.
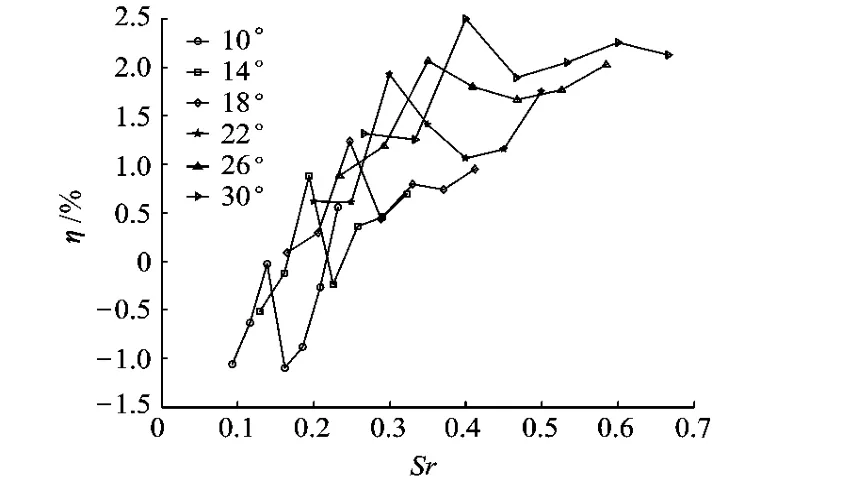
图11 η与Sr的关系
从图11中可以看出,机器鱼总体效率最大只有2.5%,远远低于鱼类的推进效率.这其中一个重要的原因是因为采用了电机驱动器,电机驱动过程中存在着很大的机械损耗,如果新型智能材料在控制方面能表现出良好的性能,用新型智能材料作为驱动器可以提高推进效率.
4.3 结果分析
推力系数峰值和效率峰值都在Sr=0.4的时候取得,这个实验结果与前人关于自然界中游动和飞行生物高效推进时的 Sr范围(0.2<Sr<0.5)一致.
一般来说,推进效率峰值所对应的Sr与推力系数峰值所对应的Sr不是同一个点,但是对于本文中设计的机器鱼,推进效率峰值和推力系数峰值都是在Sr=0.4处得到.为了研究扑翼飞行的流动机理,文献[18]用N-S方程计算了二维振动翼的尾涡脱落和推力系数,计算结果发现,推力系数峰值和推进效率峰值在相同的Sr获得.本文的实验结果与此计算结果一致.
另一方面,本文测试得到的推力系数和效率在Sr=0.4达到最大,在Sr>0.4时随着拍动频率、幅度增大而增大.这与文献[18]的数值计算结果有些差别,文献[18]的计算结果表明在Sr=0.7时推力系数和效率都达到最大,然后在Sr>0.7之后开始下降.这个结果主要是由胸鳍的柔性变形造成的,当拍动幅度和频率增大时,作用在胸鳍上的流体力增大,胸鳍的被动变形也相应增大,从而导致胸鳍拍动的名义攻角增大,推力系数和推进效率因此也相应增大.
4.4 自由航行实验
为了验证机器鱼的游动性能,在游泳馆里进行了自由航行实验.在试验过程中,当拍动幅度小于10°时,胸鳍拍动无法产生足够推进力,机器鱼无法游动;当拍动幅度增大时,游动速度随着增大;在拍动幅度为30°、拍动频率为2.0Hz时游动速度达到最大,为 0.64m/s,约 1.5 倍身长比.表1是本文设计的机器鱼与国内外胸鳍拍动推进机器鱼的对比结果.

表1 国内外胸鳍拍动推进机器鱼对比
5 结 束 语
本文基于仿生的原理,根据牛鼻鲼的胸鳍运动特点和结构特点,设计了一种基于胸鳍被动变形的柔性扑翼机器鱼,并通过水动力学实验和自由航行实验进行了验证.实验结果表明:本文提出的仿生设计模型可以较好地模拟牛鼻鲼的运动模式,基于此模型设计的机器鱼的推力系数和推进效率都在Sr=0.4时达到最大,这个结果很好地吻合了自然界游动生物高效推进时的Sr范围;另外,机器鱼最大速度可以达到1.5倍身长比,相比国内外同类型的胸鳍拍动机器鱼在速度上有明显提高.该设计模型可以为仿生水下航行器的研究提供一种思路.
仿生的主要目的是研究高效、高机动性、低噪声的水下航行器,虽然本文研制的机器鱼在速度上表现出较为出色的性能,但是从功率测量结果来看,推进效率还非常低,远远低于鱼类的推进效率.本文中测量的效率是机器鱼的总体效率,考虑到不同的驱动器,机械损耗和驱动器本身效率会有区别,因此下一步将针对胸鳍单元进行一系列功耗测量实验,以此为基础研究胸鳍的推进效率.除此之外,为了进一步理解牛鼻鲼的推进机理,还将开展胸鳍拍动的流体动力学计算,通过数值计算研究扑翼参数、胸鳍柔性对于推进性能的影响.
References)
[1] Webb P W.The biology of fish swimming:in mechanics and physiology of animal swimming[M].Cambridge:Cambridge University Press,1994:12 -14
[2] Lane M SD M,Davies JB C.Review of fish swimmingmodes for aquatic locomotion[J].IEEE Journal of Oceanic Engineering,1999,24(2):237 -252
[3] Rosenberger L J.Pectoral fin locomotion in batoid fishes:undulation versus oscillation[J].The Journal of Experimental Biology,2001,204:379 –394
[4]沈林成,王光明.仿鱼长鳍波动推进器研究的进展和分析[J].国防科技大学学报,2005,27(4):96 -100 Shen Lincheng,Wang Guangming.The progress and analysis of the research on the underwater biomimetic propulsor employing the long-fin undulations[J].Journal of National University of Defense Technology,2005,27(4):96 -100(in Chinese)
[5] Boileau R,Fan Lilian,Moore T.Mechanization of rajiform swimming motion[R].0519,2002
[6] Punning A,Anton M,Kruusmaa M,et al.Towards a biomimetic EAP robot[C]//Proceedings of the International IEEE Conference on Mechatronics and Robotics.Aachen,Germany:IEEE,2004:241-245
[7] Koichi Suzumori,Satoshi Endo,Takefumi Kanda,et al.A bending pneumatic rubber actuator realizing soft-bodiedmanta swimming robot[C]//IEEE International Conference on Robotics and Automation Roma.Italy:IEEE,2007:10 -14
[8] Wang Zhenlong,Wang Yangwei,Li Jian,et al.A micro biomimetic manta ray robot fish actuated by SMA[C]//Proceeding of the 2009 IEEE Robio.Guilin,China:IEEE,2009:1809 -1813
[9] Yang Shaobo,Qiu Jing,Han Xiaoyun.Kinematicsmodeling and experiments of pectoral oscillation propulsion robotic fish[J].Journal of Bionic Engineering,2009,6(2):174 -179
[10] Knoller R.Die gesetze des luftwiderstandes[J].Z Flugtech Motorluftschi,1909,1(1):1 -7
[11] Betz A.Ein Beitrag zur Erklarung des Segelfluges[J].Z Flugtech Motorluftschi,1912,3(1):269 - 272
[12] Von Karman T,Burgers JM.General aerodynamic theory:perfect fluids,aerodynamic theory[M].Division E,Vol.2.Berlin:Julius-Springer,1943
[13] Freymuth P.Propulsive vortical signature of plunging and pitching airfoils[J].AIAA Journal,1988,26(7):881 - 883
[14] Triantafyllou G S,Triantafyllou M S,Gopalkrishnan R.Wake mechanics for thrust generation in oscillating foils[J].Physics of Fluids,1991,3(12):2835 -2837
[15] Triantafyllou M S,Triantafyllou G S,Yue D K P.Hydrodynamics of fish swimming[J].Fluid Mech,2000,32(1):33 - 53
[16] Taylor G K,Robert L N,Thomas A L R.Flying and swimming animals cruise at a Strouhal number tuned for high power effciency[J].Nature,2003,425:707 -711
[17] Schaefer JT,Adam P S.Batoid wing skeletal structure:novel morphologies,mechanical implications,and phylogenetic patterns[J].Journal of Morphology,2005,264:298 -313
[18] Wang Z J.Vortex shedding and frequency selection in flapping flight[J].Fluid Mech,2000,410(1):323 - 341
(编 辑:赵海容)
Design and hydrodynamic experiments on robotic fish with oscillation pectoral fins
Gao Jun Bi Shusheng Li Ji Cai Yueri
(School of Mechanical Engineering and Automation,Beijing University of Aeronautics and Astronautics,Beijing 100191,China)
A robotic fish propelled by a pair of pectoral fin with oscillation motion was proposed,and experiments were carried out to study the hydrodynamic characteristic.Based on the analysis of motion feature and skeletal structure of pectoral fin of cow nose ray,a kind of robotic cow nose ray actuated by two DC servomotors is implemented.A measurement device is designed to test the thrust force and efficiency in the lows peed water tunnel,and the relationship of thrust coefficient and efficiency varying with Sr(Strouhal number)was obtained.Both the maximum thrust coefficient and the maximum efficiency are achieved at the same Sr of 0.4,which is in good agreement with the Sr range of swimming or flying animals'propulsion at high efficiency.Finally,an experiment of free swimming was conducted in a swimming pool,and it demonstrated that the maximum speed of 0.64m/s(1.5 times body-length)was achieved,which was faster than that of other raylike'robotic fishes.The results indicate that the design method is effective for building a robotic fish propelled by pectoral fins with fast speed,which is meaningful to implementa kind of UUV(unmanned underwater vehicle)by employing the propulsion mode of cownose ray.
bionics;robotic fish;propulsion
TP 242.3
A
1001-5965(2011)03-0344-07
2010-01-25
高 俊(1983-),男,湖南汨罗人,博士生,johngao2006@163.com.
