城市道路交通流检测数据精度评价
2011-03-15翟雅峤翁剑成刘小明
翟雅峤 翁剑成 荣 建 刘小明
(北京工业大学 交通工程北京市重点实验室,北京 100124)
城市道路交通流检测数据精度评价
翟雅峤 翁剑成 荣 建 刘小明
(北京工业大学 交通工程北京市重点实验室,北京 100124)
目前各种检测方法采集到的路段速度数据普遍存在一定的误差,其准确性直接影响各种交通分析模型结果的精度.针对浮动车检测器、微波检测器以及线圈检测器的路段速度数据进行研究,利用GPS(Global Positioning System)设备实时记录试验车位置,分别在快速路和主干路进行了12次实验,对不同采集方式获取的速度信息进行了精度验证和评价.实验结果分析表明,浮动车数据获取的城市快速路和主干路的路段行程速度平均误差分别为13.6%和27.8%,且采集值与实际速度具有相同的分布.快速路微波检测器和主干路线圈检测器的速度数据与真实行程速度数据的误差分别为30%和56%.表明了微波检测器的断面速度值,用来表征所处路段的行程速度时虽然具有一定的误差,但是基本能表征路段的行驶状况.该研究结论为不同精度需求的交通模型选择合适的数据源提供支持,并为利用多源数据的冗余信息提高数据精度和完备性提供了理论依据.
智能交通系统;交通信息采集;数据精度;行程速度;信息一致性;数据融合
现在城市交通拥堵问题日益严重,及时准确地发布交通信息,合理地交通预测与诱导越来越受到重视.路段行程速度作为智能交通应用系统所需的最重要数据之一,其精度直接影响系统的应用效果.人们在城市中布设了各种采集设备以获得路段速度,其中最常见的3种分别为浮动车采集系统、线圈检测器和微波检测器.其中浮动车采集系统可提供路段的行程速度,而其检测精度至今没有被系统验证.
目前,文献[1-2]验证了单独浮动车采用不同采集间隔和上传间隔的检测精度,但未对整个系统的检测精度进行验证.文献[3]用仿真的方法对得到具有给定可靠度和精确度行程时间(与行程速度描述的信息相同)所需的最小浮动车样本量进行了研究,该方法缺乏真实数据的支持.同样文献[4]用理论分析的方法得到达到95%可靠度所需的浮动车样本量,但并没有对浮动车系统本身的精度进行分析.文献[5]得出多源数据融合所估计的行程时间精度优于浮动车采集的行程时间的精度,但并未分别对各种检测器进行精度评价.文献[6]对欧洲业已建成的信息系统计算得到的门到门出行时间的准确率进行了验证,但未对系统所使用的数据源精度进行评价.文献[7]利用牌照法对出租车速度与整个交通流的行程速度进行比较,从理论上得到浮动车采集方法的精度,但未涉及实际浮动车采集系统的精度验证.
本文以北京市的浮动车采集系统为研究对象,利用试验车测试的方法验证该系统的精度并分析误差的分布和影响精度的原因.此外本文还检验了线圈和微波检测器提供的路段断面速度与该路段的行程速度的相关性.
1 实验方法
1.1 实验设计
本文选择一辆安装有DL-3 GPS接收设备的小汽车作为试验车,试验车上同时有一名记录员根据预先设定好的检测点记录试验车通过检测点时的时间.试验车沿着预先选择好的实验路线行驶,驾驶员始终保持试验车速度与车流速度一致.
本实验根据试验车通过相邻两个检测点的时间差和检测点间的路段长度得到路段的行程速度.将此路段的行程速度和浮动车的行程速度进行比较,得到浮动车行程速度的准确率.实验数据以DL-3记录的经过检测点的时间为主,当GPS信号丢失或严重漂移时利用人工记录的通过检测点的时间进行补充和校核.实验流程图如图1所示.
1.2 实验路线选择
实验路线覆盖了北京市的二、三、四环,以及长安街、平安大街等重点路段.全长29.8 km,共包含143条浮动车路链,13个微波检测器和5个线圈检测器.既包含了城市快速路,也包含了城市主干路及次干路.其中快速路13.4 km,占45%;主干路 15.3 km,51.3%;次干路 1.1 km,占 3.7%.所谓浮动车路链为浮动车检测系统中,对道路网进行人为的分段,每一段称为一条浮动车路链.浮动车采集系统中的数据均表示为浮动车在某条路链上的行程速度.

图1 实验流程图
整条实验线路设置了32个检测点,将实验线路分为31个路段.每个路段都包含多条浮动车路链,路段的起点和终点与浮动车路链的起终点重合,目的是使计算方便准确.同时为了验证微波检测器数据和线圈检测器数据,每个路段尽可能仅包含一个检测器.
实验于2009年12月期间共完成了12次,包括工作日和休息日,一天中的早晚高峰和平峰.
2 试验车速度数据验证
现有对路段行程速度的检测方法中,基于牌照识别的检测方法具有最高的检测精度,因此通常将其作为路段行程速度的真值.但牌照法需要投入大量人力物力,且覆盖范围有限.因此本文拟以试验车数据作为路段行程速度的标准值.为了证明其合理性,本文设计了检验牌照识别数据和试验车速度数据的相关性和一致性的实验.
2.1 验证实验方法
沿实验线路分别挑选2个位于快速路和主干路的代表路段,每个路段分别于上下游两个断面各设置1台摄像机,拍摄路段最内侧车道上行驶车辆的车牌照.试验车GPS设备每1 s录一次数据,且记录员记录试验车通过上下有断面的时间.同时将摄像机时间与GPS的时间保持同步.

统计试验车通过牌照法检测路段时刻,5min内所有经过该路段上下游断面车辆的时间差并计算路段平均行程速度,见公式(1).式中,L为上下游断面之间距离;Ti为5min内每辆车经过两个断面的时间间隔;n为5min内经过两个断面的车辆总数.以此数据作为标准值对试验车行程速度数据进行验证.
2.2 结果分析
实验进行12次,得到48对数据,其中快速路和主干路各24对,得到的数据分别见图2、图3.

图2 快速路牌照识别和试验车速度对比图

图3 主干路牌照识别和试验车速度对比图
对两组数据的统计特性进行检验,检验其是否具有相同的概率分布.由于两组数据是同一交通参量的测量值且具有一一对应的关系,故应对其进行配对检验.配对数据检验的方法有很多,主要包括T检验和一些非参数检验,如Wilcoxon检验,符号检验和McNemar检验等.T检验和Wilcoxon检验针对小样本量(N<30)的连续数据检验效果较好.其中T检验要求被检验数据符合正态分布,而Wilcoxon检验不要求.因此首先检验本实验的样本是否符合正态分布.
K-S检验(Kolmogorov-Smirnov检验),用来检验单一样本是否分布来自某一特定分布总体.原假设H0:样本来自的总体符合某特定分布.其基本公式为

式中,F0(x)为理论分布的分布函数;Fn(x)为样本的累积频率函数.当实际观测的D大于拒绝临界值D(n,a)时,拒绝原假设H0.也可根据差值序列D(x)计算显著性进行判断.当显著性大于显著性水平α(本文α均取0.05)时,接受原假设.
对4组数据进行单样本K-S检验,结果如表1所示.

表1 K-S检验结果表
通过表中结果所示,4组数据的双侧显著性均大于0.05符合正态分布,因此可以分别对快速路和主干路的行程速度数据进行配对T检验.
T检验的结果如表2所示.

表2 配对T检验及误差分析结果表
从表2中可以看出,主干路数据配对T检验的显著性均大于0.05,不能拒绝原假设,即试验车数据和牌照识别数据来自相同均值的正态总体,且显著性非常高.相关系数r均大于0.9,表示试验车数据和牌照识别数据关系密切.上述信息说明试验车数据和牌照识别数据具有相同的分布特征且它们之间的联系非常紧密.此外,不论快速路还是主干路其平均绝对误差(AAD,Average Absolute Deviation)都不超过5 km/h,其中快速路只有3.31 km/h;主干路的平均相对误差(AARD,Average Absolute Relative Deviation)为 15.7%,而快速路仅有7.2%.这说明试验车所测量的行程速度数据和牌照识别数据之间的误差很小.因此,本文使用试验车的路段行程速度作为标准值对各种检测器数据进行验证是可行的.这为今后开展类似的实验提供了重要的参考.
3 浮动车速度数据验证
3.1 异常数据剔除
根据多次实验的结果,以试验车数据为标准值,计算每个实验路段的浮动车行程速度的平均相对误差,具体的结果如图4所示.

图4 浮动车数据各路段平均相对误差
图4中黑色的实验路段的相对误差过高,明显高于其他路段,通过对具体实验路段的位置分析得知,发生数据异常变化的路段均为实验路线中主干路左转路段.即试验车所反映的是沿该路段左转向行驶的行程速度,而浮动车数据反映的是该路段以直行为主平均行程速度,近似认为该路段的直行行程速度.因此为了保证实验的合理性,剔除上述路段的数据.且根据上述分析可知,当用户需要含有左转的路段的行程速度时,浮动车速度不能反映路段的真实行程速度,应在浮动车速度数据的基础上适当折减.
3.2 快速路浮动车数据精度分析
快速路浮动车行程速度和试验车行程速度(标准值)的对比结果如图5所示.从图中可以看出浮动车行程速度数据与标准值在非自由流(行程速度小于60 km/h)的条件下误差较低,自由流条件下误差相对较大.进一步对数据进行分析的结果如表3所示.
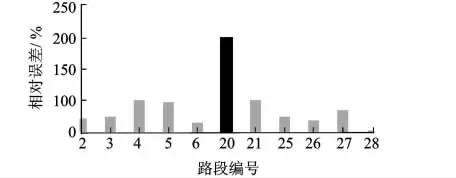
图5 快速路浮动车数据与标准值对比图

表3 快速路浮动车数据精度表
表3中可以看出,浮动车快速路的绝对误差(AD,Absolute Deviation)和相对误差(ARD,Absolute Relative Deviation)的平均值、最大值和最小值分别为 5.72 km/h和 13.6%,17.2 km/h 和43.2%,0.1 km/h 和 0.5%.已经能满足日常实时路况信息的发布及旅行时间估算等应用的精度要求.而目前行程速度预测的精度要求为不超过20%,浮动车快速路数据也可满足要求.尤其是其最大误差不超过20 km/h,对于一般根据行程速度将路况分为3级,每级之间的速度间隔为20 km/h的交通状态信息发布和群体交通诱导而言其应用效果和准确率符合应用需求.
对浮动车数据进行配对T检验,其显著性为0.029小于0.05表明快速路浮动车数据与标准值分布情况不同,分析其原因为快速路自由流状态下,浮动车速度均值小于标准值.因此对非自由流状态下快速路浮动车数据进行分析,结果如表4所示.
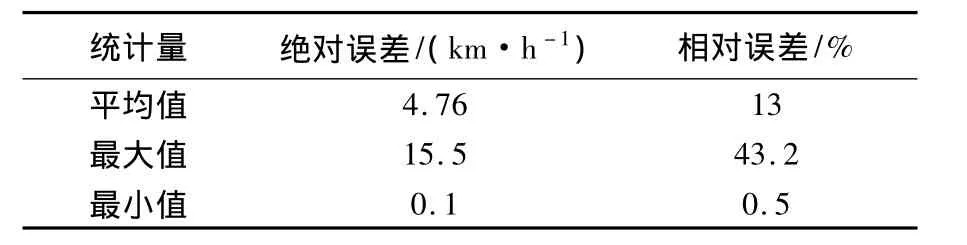
表4 快速路非自由流浮动车数据精度表
从表4中可以看出,绝对误差和相对误差的平均值均有所降低.在非自由流状态下的进行配对T检验的显著性为0.373大于0.05,故接受原假设,表明快速路浮动车数据与标准值来自同一分布的正态总体,且r=0.928说明关系密切.上述结果表明快速路浮动车数据在非自由流状态下可以完全代表路段的行程速度.而自由流状态下的速度偏低,应加以修正以提高精度.其原因是快速路自由流速度分布较分散且出租车出于经济原因其速度较其他车辆略低.
3.3 主干路浮动车数据精度分析
主干路浮动车行程速度与标准值对比情况如图6所示.浮动车数据的波动性明显小于标准值,其原因主要为主干路行程速度受信号灯的影响本身波动较大,而浮动车数据受本身计算方法和实际采集处理间隔的限制,对路段行程速度的波动不能很好地体现.

图6 主干路浮动车数据与标准值对比图
从表5中可以看出,主干路浮动车数据的绝对误差和相对误差的平均值均大于快速路,表明其精度比快速路略低,但依然可以满足交通诱导、旅行时间和交通状态估计的要求.但对于行程速度预测需求,其精度略差.对数据进行配对T检验,其显著性和相关系数分别为0.941和0.825,表明其数据可以近似代表该路段的行程速度.

表5 主干路浮动车数据精度表
4 微波和线圈检测器验证
浮动车数据可以近似代表路段行程速度,并用于目前大多数基于路段行程速度的应用模型.但是浮动车数据受到客观条件的影响很大,缺失现象较严重.因此,为了发挥多源数据的优势,能否使用微波和线圈数据对浮动车数据进行合理的补充成为本文研究的另一部分内容.
4.1 微波检测器数据分析
北京市的微波检测器全部布设在快速路,用以检测路段的断面瞬时速度.它与路段行程速度具有本质区别,但可适度反映该路段的整体运行状态.对比微波检测器数据和行程速度标准值,如图7所示.

图7 快速路微波数据与标准值对比图
微波检测器数据的绝对误差和相对误差的平均值分别为10.5 km/h和29.5%,虽然与浮动车速度相比有一定差距,但如用于信息发布和基于交通状态判断的诱导,其精度完全满足要求.此外根据T检验和相关系数的计算结果,微波检测器数据可以近似代表该路段快速路的行程速度.快速路微波数据精度见表6.

表6 快速路微波数据精度表
根据实验,本文还发现微波检测器反映路段行程速度的精度,与微波检测器布设在该路段的位置有关,如图8所示.

图8 微波数据各路段平均相对误差
路段20的微波检测器数据的平均相对误差明显高于其他检测器,其速度值明显高于标准值.分析其原因为路段20的微波检测器布设在路段的下游端点,而其余检测器均布设在路段中部或略靠近上游.交通流对于拥堵的传播是由下游向上游传播,位于下游的微波检测器无法反映上游的拥堵情况.
4.2 线圈检测器数据分析
线圈检测器作为自适应交通信号控制系统(如Scoot)检测路口附近交通流信息的终端设备的一部分,均布设在主干路信号交叉口附近,其检测的速度也为路段的断面瞬时速度.
对数据进行T检验,显著性为0.031拒绝原假设,表明线圈检测器数据和行程速度标准值来自于不同分布总体,存在明显差异.且相关系数为0.086相关度很低,表明二者之间没有紧密联系.从表7可以看出线圈检测器数据平均相对误差为56.1%超过了50%,这样的精度无法满足一般的应用需求.因此不能用线圈检测器数据代表主干路路段行程速度.

表7 主干路线圈数据精度表
5 结论
浮动车数据可以用来近似代表路段行程速度,且不论是快速路还是主干路数据精度均可满足目前多数应用的精度需求.
在快速路浮动车数据缺失的情况下,可以利用该路段的微波检测器数据代替,用以代表路段行程速度.需要注意的是本文所涉及的实验路段均为城市快速路,微波检测器布设较密集,检测路段的间隔长度为500~800m.对于更长距离的路段,由于交通流变化,其精度结果有待进一步验证.
References)
[1]姜桂艳,常安德,张玮.基于GPS浮动车的路段行程时间估计方法比较[J].吉林大学学报:工学版,2009,39(增刊2):182-186 Jiang Guiyan,Chang Ande,Zhang Wei.Estimation approaches of average link travel time using GPSdata[J].Journal of Jilin University:Engineering and Technology Edition,2009,39(Supplement2):182-186(in Chinese)
[2]姜桂艳,常安德,张玮.基于GPS浮动车的交通信息采集系统研究[J].交通信息与安全,2009,27(4):104 -108 Jiang Guiyan,Chang Ande,Zhang Wei.Traffic information collection system based on GPS floatingcar[J].Jounal of Transport Informatiaon and Safety,2009,27(4):104 -108(in Chinese)
[3] Cetin M,ListG F,Zhou Yingjie.Factors affecting minimum number of probes required for reliable estimation of travel time[J].Transportation Research Record:Journal of the Transportation Research Board,2005,1917:39 -44
[4] Green M W,Fontaine M D,Smith B L.Investigation of dynamic probe sample requirements for traffic condition monitoring[J].Transportation Research Record:Journal of the Transportation Research Board,2004,1870:55 -61
[5] Bhaskar A,Chung E,Dumont A G.Travel time estimation on urban networks with mid-link sources and sinks[J].Transportation Research Record:Journal of the Transportation Research Board,2009,2121:41 -54
[6] Cohn R N.Real-time traffic information and navigation an operational system[J].Transportation Research Record:Journal of the Transportation Research Board,2009,2129:129 -135
[7]扈中伟,温慧敏,孙建平,等.基于车牌照识别数据的浮动车系统分析与验证[C]//2008第四届中国智能交通年会论文集.上海:同济大学,2008:834 -840 Hu Zhongwei,Wen Huimin,Sun Jianping,et al.Study on floating car data system based on vehicle license plate recognition data[C]//Proceedings of the 4th China ITS Annual Meeting.Shaihai:Tongji University,2008:834 -840(in Chinese)
[8] NanthawichitC,Nakatsuji T,SuzukiH.Application of probebehicle data for real-time traffic state estimation and short-term travel-time prediction on a freeway[J].Transportation Research Record:Journal of the Transportation Research Board,2003,1855:49-59
(编 辑:张 嵘)
Experimental based traffic flow detectors data accuracy evaluation
Zhai Yaqiao Weng Jiancheng Rong Jian Liu Xiaoming
(Beijing Key Laboratory of Transportation Engineering,Beijing University of Technology,Beijing 100124,China)
Considerable errors exist in the road speed data obtained from various detectors and directly influence the accuracy.Various traffic models were established for estimation.12 groups of field experiments on different classes'roads by using a test vehicle with global positioning system(GPS)modules were implemented.Through combining automatically recording and manually recording,the accuracy discrepancy of travel speed data collected by floating car system,microwave detectors,and loop detectorswas attempted to verify.The results analysis shows that the average error rate of travel speed of floating cars at road section on urban expressways and arteries are 13.6%and 27.8%,and the acquisition data and the actual speed have the same distribution.Microwave detector on expressways and loop detectors on arteries are 30%and 56%.Even though the section velocities of the microwave detector have some errors,which could more or less describe the basic driving conditions.Thus,results provide some evidences for selecting appropriate traffic model decided by accuracy.Moreover,it provides evidences for the application of different dimensions information inmultisource data fusion for higher accuracy.
intelligent transportation system(ITS);traffic information collection;data accuracy;travel speed;information consistency;data fusion
U 495
A
1001-5965(2011)06-0733-05
2011-01-25
建设部十一五支撑计划资助项目(2006BAJ18B03);科技部十一五支撑计划资助项目(2006BAG01A01)
翟雅峤(1981-),男,北京人,博士生,stanleyzhai@139.com.