辐射环境视觉智能监控系统
2011-03-14秦国辉徐晓秋赵孝文李北城
秦国辉,徐晓秋,赵孝文,李北城
(1.黑龙江省科学院科技孵化中心,黑龙江哈尔滨150090;2.黑龙江省科学院技术物理研究所,黑龙江哈尔滨150086)
自上世纪80年代末以来,随着信息技术、传感器技术、数据通信技术、自动控制技术、运筹学、图像分析技术、计算机网络以及人工智能等技术的发展,将计算机视觉、图像处理、模式识别、人工智能等应用于监控领域是研究的重点和热点[1]。因此,为了更高效、准确地监测辐射场所的情况,保护国民安全,开展视觉监测工作是非常必要的。
针对辐射场所监测技术存在的问题,本文研究目的是尝试实现一种适用于辐射场所的智能监控系统。该系统基于计算机视觉技术,能够监测场所中每个细微变化,能够检测出辐射环境出现的危险事件,并记录、判断和预警多种不同放射场所发生的情况,从而减少相关工作人员的工作强度,避免发生危险。该系统应具有高准确率、低漏检率等特点。
1 视觉监控系统整体方案
基于多视觉传感器融合技术对场景进行监控是视频监控系统的发展趋势,而且针对不同的监控需求,往往需要设计不同的解决方案。例如:(1)在室内场景,提出了一种多个全景摄像机和多个云台摄像机(PTZ)相融合的方案,全景摄像机被用于场景内三维人体对象的跟踪,而PTZ则会对距离最近的人体对象进行脸部特写抓拍;(2)在室外场景,设计了一种全景摄像机和PTZ相融合的装置并将其安装在机动车顶部[2]。这样便能有效地对周围的机动车进行检测、跟踪和车型分析。
为了实现适用于大场景的事件监控系统,本文也采用多视觉传感器相融合的方法。图1展示了全方位视觉传感器和多个高速球摄像机相融合的设计方案。一方面,全方位视觉传感器拥有360度的广阔视野,相比于普通摄像机,只需要较少数量的该类型摄像机便能实现对人场景的覆盖,因此可以在宏观上检测辐射场所中的人的活动并确定危险程度;另一方面,考虑到全方位视觉传感器的分辨率相对较低,采用具备较高分辨率的高速球摄像机,它能够满足系统对场景内特殊对象进行重点关注的需求,可以在微观上实现人特写抓拍。之所以在中间以及四周的五个不同位置安装高速球摄像机,是为了对同一事件同时进行抓拍从而尽可能地获取到详细的信息。

图1 系统网络结构Fig.1 Network structure of systems
2 图像处理关键技术
系统图像监控范围为辐射场所,采用全方位云台配合高清晰度、高放大倍数、低照度要求的摄像机及镜头,确保对辐射场所各区域进行无死角的监控。在此基础上通过先进的图形处理技术和算法研究,实现辐射场所的图形自动报警与自主式控制,管理操作。同时将辐射场所报警图像利用无线网桥或无线短信、彩信发布到上级主管部门的MIS网上,网上客户在安装了监控系统客户端软件后即可对受控辐射场所进行远程监控。
传统的基于人工操作的视频监视不能适应实际应用的需求,需要开发新一代的监控技术。摄像机获取视频序列后,首先通过图像恢复或超分辨率复原技术提高图像质量,然后对场景中的目标进行检测、分类和跟踪,进而实现视频内容分析理解,包括场景中的异常检测、人的身份识别以及视频内容的理解描述等[3]。现有一些算法大多是针对这一类问题提出的,主要包括背景相减法、相邻帧差法和光流法等,对其内容进行智能化分析和理解,并做出相应的判断。它处于智能监控技术的高级阶段,是实现监控智能化的关键。
2.1 目标检测
在视频监控系统中,当摄像头保持不动时,可以认为视频序列图像中的背景图像相对不动。这时,视频监视算法包括变化检测和目标提取两部分内容。所谓目标检测,就是当场景中有新目标进入或者场景中有目标移动时,通过变化检测算法得知有目标出现,而目标提取则是把进入场景中的目标从背景图像中分割出来。
对于运动目标检测主要分析了现有的几种常用的检测方法如光流法、帧差法、背景差法的优缺点,之后对背景减法进行了深入的研究。在对背景减法的研究过程中首先分析了基于Kalman滤波的背景建模和基于高斯模型的背景建模这两种方法的不足,这两种方法对环境突变鲁棒性都不够好,背景模型也不能尽快地适应场景的改变,使得原本静止的物体发生运动时产生较长时间的拖影。针对上述问题对混合高斯模型进行了改进,在模型初始化时采用改进的方法能很好的建立一个能够反映实际场景的模型,在背景更新阶段引入了加速因子和合理性判断使得模型能更快更好地适应多变的环境,能够很好地抵抗环境突变带来的影响,同时也能够很快地消除静止物体发生运动时产生的拖影。另外本文的场景模型是对HSV空间的H和V分量分别建立模型得到的,在目标检测时为了尽量消除光照和阴影的影响,本文联合这两个分量共同去检测,通过实验可以看出改进的基于混合高斯模型的目标检测能够很好地消除光照和阴影的影响。
2.2 事件检测与跟踪
本文所研究的是对形状较为简单的刚体目标进行跟踪,目标跟踪的基本原理见图2所示。在视频序列中进行运动区域的检测、目标的提取,目标提取的结果就成为目标跟踪系统的源数据。在跟踪过程中,首先生成目标的特征模板;然后在目标前一帧的预测位置范围进行搜索匹配,将最佳匹配的运动区域对目标进行特征模板更新以及目标位置修正,同时进行下一帧的目标位置预测。目标检测与跟踪原理的框图如图2所示。
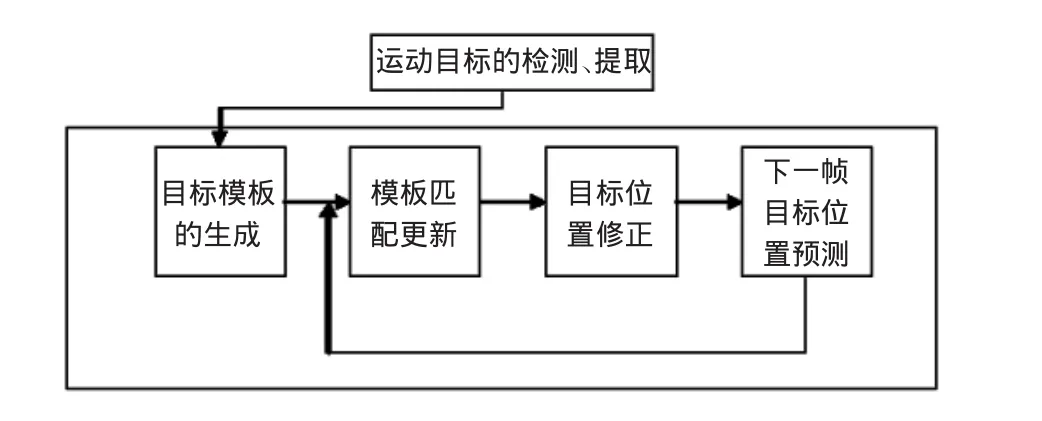
图2 目标检测与跟踪原理Fig.2 Principle of target detection and tracking
2.3 超分辨率复原技术
超分辨率复原技术:图像获取过程中,受成像条件和成像方式的限制,成像系统并不能获取原始场景中的所有信息。成像过程往往会受到光学模糊、运动模糊变形和噪声等诸多因素的影响,造成获取图像质量的下降[4]。超分辨率复原技术采用信号处理的方法,在改善图像质量的同时,试图恢复成像系统截止频率之外的信息,是提高空间分辨率改善图像质量的有效方法(将图像读入Matlab仿真软件可以实现)。这一技术的最大优点在于成本低,现有的低分辨率成像系统仍可以使用。实际上,超分辨率复原技术和图像恢复技术在理论上有着密切的联系,可认为是第一代图像恢复技术,该部分就是视觉传感器的研究。新一代智能视觉监控技术的研究是一个极具挑战性的前沿课题,它赋予监控系统观察分析场景内容的能力,实现监控的自动化和智能化,因而具有应用潜力。视觉监控系统的智能化分析过程由运动目标检测、分类、跟踪和视频内容分析等几个基本环节组成,视频内容分析又包括异常检测、人的身份识别以及视频内容理解描述等。
3 传输与控制
建立覆盖辐射场景的无线系统,应保证系统技术架构的先进性、未来的功能与性能的可扩展性、通信的可靠性、系统的稳定性与相对较低的工程量。能做到信息共享,从而减少硬件且提高设备的利用率,简化二次接线,使辐射场所主控制室的面积和成本下降,大大节省人力物力等投资。
图像控制部分主要解决基于ARMS3C2440的视频监控系统及视觉传感器的研究。S3 C2440A是三星公司设计的一款基于ARM920T内核的32位嵌入式RISC(reduced instructions set computer)微处理器,它的最高工作频率可达533MHz,内部集成了丰富的外设接口,其中包括了camera接口,具备高性能、低功耗的优点,适用于图像采集,传输等应用。即不采用通用的视频监视系统而采用视觉监控系统——不随时录相,只在出现异常情况下开始录相,再经过图形处理技术和算法:即基于图像的目标识别,且必须准确与及时,以便远端人员能及时了解情况做出相应的处理措施。
4 结束语
总之,视觉监控技术在提高质量、安全和管理等方面收效显著。随着自动化技术的飞速发展,视觉技术的应用前景更广阔。辐射场所视觉监控系统解决了辐射场所现场的可视化和环境监控问题,为实现辐射场所无人值班、无人值守提供了可靠保证,有极高的使用价值和利用价值,应加大辐射场所视觉监控系统的开发和建设力度。同时,辐射场所视觉监控系统的推广应用对提高辐射场所运行的安全性、可靠性,提高运行管理的科学性,促进管理工作的现代化有着现实意义和历史意义。
[1] 段峰,王耀南,雷晓峰,等.机器视觉技术及其应用综述[J].自动化博览,2002,(3):59~61.
[2]赵劫,刘铁根,李晋申.基于DM642的高速图像识别系统设计[J].电子测量与仪器学报,2007,(01):86~89.
[3]张广军.机器视觉[M].北京:科学出版社,2005.
[4]马颂德,张正友.计算机视觉理论与算法基础[M].北京:科学出版社,1996.