音圈电机驱动型快速控制反射镜机械结构研究
2011-03-10徐新行王兵庄昕宇陈宁李莹
徐新行,王兵,庄昕宇,陈宁,李莹
(1.中国科学院 长春光学精密机械与物理研究所,长春 130033;2.吉林大学 管理学院,长春 130022)
快速控制反射镜作为光学系统中的关键性器件,已在自适应光学、精密跟踪、目标指向、光束控制及光通信等领域得到广泛应用[1-3]。其主要功能是实现平面反射镜的快速、高频转动,进而达到及时调整光束倾斜误差、校正光路传播方向和稳定光束的目的。其特点是反射镜转角范围小,通常为分秒级,但要求系统的响应速度和控制带宽非常高,一般为几十赫兹到上千赫兹[4]。
目前,对于响应速度要求较高的快反系统大多采用压电陶瓷进行驱动。利用压电陶瓷的高频响应特性,系统的响应频率可以达到上千赫兹。但压电陶瓷的行程很小,只有几十微米,而所需的驱动电压却高达几百伏。与之相对,音圈电机的驱动电压只有十几伏,行程却是压电陶瓷的成百上千倍。而且音圈电机自身的响应频率也很高,再通过系统机械结构的优化及伺服控制系统的补偿,系统的响应速度也能达到上百赫兹[5]。因此,音圈电机已逐渐成为快反系统的首选驱动元件之一。
在快反系统中,结构形式直接决定了系统的谐振频率和负载能力[6,7],进而影响快速控制反射镜口径与响应速度的提高。本文针对音圈电机驱动型快反系统,对各种常用结构形式进行了对比分析,并根据现有机械结构的不足,提出了新型的刚性承载方式,为大口径、高负载型快速控制反射镜的发展提供了一种新思路。
1 音圈电机驱动器分析
音圈电机驱动器主要分为直线式和回转式两种,分别提供直线型和圆弧型的运动形式,具有高加速度、高速度、高频响、高精度的特点[8]。这两种运动形式均可用于快反系统,实现平面反射镜的高频、快速转动。
1.1 直线式音圈电机
图1为直线式音圈电机的结构示意图,如图所示,这种音圈电机主要由线圈、永久磁铁及各自的支撑件组成,通过调节线圈中电流的幅值、频率和方向,即可实现电机精确的伸缩运动。其中,线圈与磁体相互分离,之间存在必要的工作间隙(用于快反系统的直线式音圈电机,工作间隙约为0.6~0.8mm)。由于此工作间隙的存在,一方面,避免了线圈与磁体之间的摩擦和碰撞;另一方面,使得磁铁与线圈之间在径向方向上无相互约束。即二者在进行相对直线运动时,允许有一定的相对转动,从而实现平面反射镜的小角度偏转。
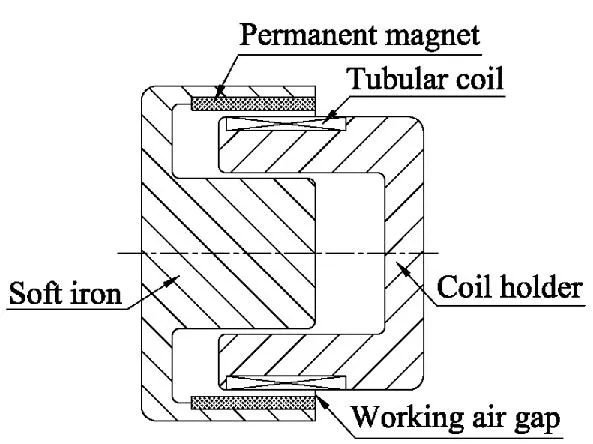
图1 直线式音圈电机示意图Fig.1 Linear voice coil actuator
在快反系统中,一般选择线圈与平面反射镜相连、磁铁固定式的结构。主要是因为磁铁的质量较大,一般为线圈的3-5倍。如此布置,可以大幅度减小运动件的转动惯量,对提高系统的谐振频率非常有利。不足是:线圈输电线处于运动状态,易出现断路现象。此外,线圈易发热,并将热量直接传递给平面反射镜,而反射镜的面形对温度较为敏感,因此,限制了系统的长时间连续工作。
图2为快反系统中直线式音圈电机的排布方式及反射镜受力情况示意图。如图2(a)所示,音圈电机通常采用对称的排布方式,即通过两对电机的推拉运动实现平面反射镜绕轴线(X轴或Y轴)的旋转。如图2(b)所示,反射镜在一对力偶的作用下进行旋转,受力情况较好。若采用非对称的布置方式,如图2(c)所示,反射镜在一个推(或拉)力作用下转动的同时,会在中心支点处产生一个附加力,从而引起反射镜的整体轴向位移,最终造成测角误差,影响系统的总体工作精度。而采用3个音圈电机圆周均布的快反系统,在控制平面反射镜实现二维偏转时需要进行必要的坐标变换,增加了控制系统的负担[7]。

图2 直线式音圈电机排布及反射镜受力情况示意图Fig.2 Location of four voice coil actuators and force act on mirror
1.2 回转式音圈电机
图3为回转式音圈电机的组成结构示意图,此类音圈电机与传统电机相同,采用轴/球轴承作为引导系统。所提供的弧型运动光滑平稳,且无需换向装置,目前已成为了快速响应、有限角激励系统中的首选驱动元件[8]。在快反系统中,该型音圈电机主要用于X-Y轴框架式结构,并采用角度测量传感器对反射镜体的转角直接测量,有利于系统控制精度的提高。
2 快速控制反射镜机械结构分析
目前研究最多的快反系统结构形式主要有两种:一种是X-Y轴框架式,也称为有轴式结构,内外框架分别绕两相互正交的轴线转动,实现平面反射镜的二维偏转,如图4、图5所示;另一种是柔性无轴式结构,主要利用弹性元件的挠性工作,其结构组成如图6所示。
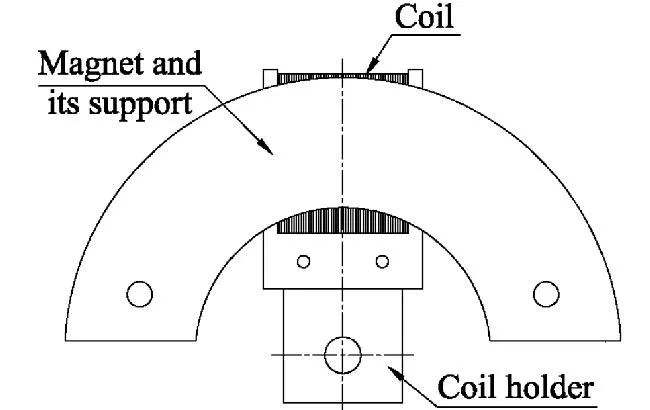
图3 回转式音圈电机示意图Fig.3 Rotary voice coil actuator
2.1 X-Y轴框架式快速控制反射镜
X-Y轴框架式快反系统主要包括:基座、内外框架、平面反射镜、音圈电机和转角测量传感器等。外框架轴系安装在基座上,固连有平面反射镜的内框架轴系安装在外框架上。内外框架的旋转既可以选用直线式音圈电机驱动[9](如图4所示),也可以选用回转式音圈电机驱动[10](如图 5所示)。这种结构的优点是结构刚度好、承载能力强,且转角范围大,尤其是以回转式音圈电机为驱动元件的快反系统。缺点是对轴系的精度要求较高,系统的转动惯量和摩擦力矩偏大,不利于谐振频率的提高;而且此结构的体积偏大,受空间限制严重。

图4 直线式音圈电机驱动型框架式结构Fig.4 X-Y frame structure driven by linear voice coil actutors

图5 回转式音圈电机驱动型框架结构Fig.5 X-Y frame structure driven by rotary voice coil actutors
2.2 柔性无轴式快速控制反射镜
柔性无轴式快反系统主要由平面反射镜、镜托、弹性元件、音圈电机、基座及位移测量传感器等组成,如图6所示。它的优势是:结构简单,无摩擦阻力矩,响应速度快,但对弹性元件的要求高。即要求弹性元件在期望运动方向上具有足够的柔性,而在限制运动的方向上具有足够的刚度[11]。因此,系统工作时平面反射镜的运动形式较为复杂(在产生转角运动的同时会产生微量的线位移),不适于在振动、冲击、回转等恶劣的工作条件下使用。此外,这种结构形式的快反系统转角范围小、承载能力有限,更适于小口径、轻量型的反射镜体。

图6 柔性无轴式结构Fig.6 Flexible axis structure without shafts
2.3 球面副式快速控制反射镜
针对传统型快反系统结构形式的不足,本文提出了新型球面副式支撑结构。
如图7所示,球面副式快反系统主要包括:平面反射镜、外球面镜托、内球面镜框、滚珠、音圈电机、支撑弹簧、基座及位移测量传感器等。其中,镜托的外侧表面和镜框的内侧表面均为球面的一部分,之间通过高精度滚珠实现刚性连接,同球心装配。因此,固连有平面反射镜的镜托即可借此球面副在镜框中万向旋转。在正交分布的4个音圈电机的推拉力作用下,实现反射镜的二维偏转。4个位移测量传感器如图7所示对称布置,每2个传感器完成绕一个轴线旋转偏转角的测量,减小了反射镜因轴向位移造成的测量误差。
本文提出的快反系统结构简单、可靠实用,既没有复杂的轴系,又实现了刚性承载,并且对振动冲击、回转等恶劣的工作环境具有较强的适应性。尽管系统的转动惯量和摩擦阻力矩偏大,结构的谐振频率偏低。但对于响应速度要求不高,工作条件恶劣的光学系统,此结构具有较大发展空间。
3 结论

图7 球面副支撑式结构及其电机传感器分布示意图Fig.7 Diagram of the structure with spherical pair and location of voice coil actuators and sensors
(1)音圈电机凭借自身高速度、高频响、高精度的特点,在工程应用领域,正逐步成为快反系统的首选驱动元件之一。
(2)X-Y框架式快反系统承载能力强、转角范围大,但轴系结构复杂,转动惯量、摩擦阻力矩和体积较大,系统谐振频率不高。
(3)柔性无轴式快反系统结构简单、响应速度快,是目前国内外发展的主流结构,但承载能力和对工作环境的适应能力有限。
(4)新型球面副支撑式快反系统,既无复杂轴系结构,又实现了刚性承载,并且对振动冲击、回转等恶劣工作环境具有较强的适应性,为新型快速控制反射镜的发展提供了一种新思路。
[1]Tao T,Yongmei H,Chengyu F,et al.Acceleration feedback of a CCD-based tracking loop for fast steering mirror[J].Optical Engineering,2009,48(1):013001.
[2]Felix E,Morgan Steven R,Wasson A,et al.Large,high performance,fast steering mirrors with FPGA-embedded controls[J].SPIE,2009,7466(74660H):1-10.
[3]王永辉,郭劲.快速转向反射镜系统的设计简介[J].长春理工大学学报,2003,26(2):51-53.
[4]Francisc M T,Derek J E,Timothy R.Hilby,et al.High bandwidth fast steering mirror[J].SPIE,2005,5877(587707):01-14.
[5]凌宁,陈东红,于继龙,等.大口径大角位移的两维高速压电倾斜反射镜[J].量子电子学报,1998,15(2):206-211.
[6]王志臣,张艳辉,乔兵.望远镜跟踪架结构形式及测量原理浅析[J].长春理工大学学报,2010,33(1):18-21.
[7]张丽敏,郭劲,陈娟.快速反射镜机械结构研究综述[J].光机电信息,2005(3):21-24.
[8]张大卫,冯晓梅.音圈电机的技术原理[J].中北大学学报:自然科学版,2006,27(3):224-228.
[9]John D W,Tyler M.A.Fast steering mirror[P].United States Patent,Patent No.:UA 6856437 B2
[10]邵帅,高云国,郭劲,等.二维快速控制水冷反射镜装置设计[J].光学 精密工程,2009,17(3):493-498.
[11]Michael S,Gerald R,Mehrdad K,et al.Design Considerations for Fast Steering Mirrors(FSMs)[J].SPIE,2002,4773:63-73.
