三维跟踪扫描影像分析方法的实现与精度分析
2011-03-06艾康伟王博伟彭磊华
艾康伟,王博伟,彭磊华
1 前言
目前在国内,通常采用三维定点录像分析的方法对运动技术进行诊断和分析。三维定点录像分析的方法对录像拍摄的要求是:在使用至少两台摄像机拍摄标定框架后,其摄像机的位置和焦距等物理参数均不能改变,因此,称之为“三维定点录像分析的方法”。这种方法一般用来对运动范围不大的运动项目,如举重、铅球等,或虽然运动范围较大但只对某一技术环节,如跳高的起跳等,进行三维运动学分析。对于运动范围较大的运动项目,如分析跳高或三级跳远的整个运动过程,若采用三维定点录像分析的方法,所拍摄的运动目标的成像较小,会给图像的解析造成很大的误差;此外,大部分的运动过程都发生在标定框架所覆盖的空间之外,这对图像解析的精度造成很大的影响。解决这一问题的途径可采用三维跟踪扫描影像分析方法。
三维跟踪扫描影像分析方法就是摄像机跟踪运动目标来记录运动的图像,并通过专门的图像解析系统解算得到运动目标空间实际三维坐标的方法。此方法是在三维定点录像分析方法的基础上的应用扩展,在国外称之为Pan/Tilt/Zoom功能。在摄像机架设在位置固定的三角架上后,Pan功能就是摄像机可以绕垂直轴左右摇动,Tilt功能是可以绕水平轴上下摇动,这两个功能可保证摄像机跟踪运动目标拍摄图像;而Zoom功能可实现摄像机在拍摄的过程中其焦距可调,从而保证了尽可能大的运动目标成像。
在国内应用较为普遍的三维运动录像分析系统,如德国的SIM IMotion、美国的Peak Motus等都具有Pan/Tilt/Zoom功能,它们的算法都采用了Volker Drenk[7](1994)研究的Pan/Tilt/Zoom算法。
艾康伟[1]等(2002)采用定点/定焦的拍摄方法对较大范围进行了标定,获得了我国优秀花样滑冰双人滑运动员抛跳4周的三维运动学数据。但对于三维跟踪扫描影像分析方法在国内目前还没有应用的报告;而在国外,已有学者(Reyher,Raschner,Moessner)[6,8,9]采用这种方法获得了水上运动项目赛艇和障碍滑雪运动员的三维运动学数据。
在控制点目标观测与坐标框架换算系统[2]的基础上,应用德国的SIM IMotion三维运动录像分析系统的Pan/Tilt/Zoom功能,实现扫描跟踪摄像运动目标的像坐标到空间实际三维坐标的解算,并对其解算的精度进行初步的分析;并较为详细的介绍具体的操作流程,可作为今后应用此项分析技术的参考。
2 实验设计
2.1 实验目的
在实验室的条件下,使用两台数码摄像机按照三维扫描跟踪影像分析的步骤和要求分别对空间的若干个点(球)和已知长度的运动中的杆进行三维跟踪扫描录像,并应用德国的SIM IMotion三维运动录像分析系统的Pan/Tilt/Zoom功能对空间的若干个点(球)的三维坐标和杆的长度进行解算,同时对空间的若干个点(球)使用全站仪和控制点目标观测与坐标框架换算软件系统进行测量和三维坐标的转换,并将得到的数据结果与影像分析的结果进行对比,以验证影像测量方法的可靠性;将影像测量计算得到的杆长度与杆的实际长度进行对比分析以对影像测量的精度进行评估。
2.2 实验使用的仪器
带Pan/Tilt/Zoom功能模块的SIM IMotion三维运动影像分析系统。
数码摄像机索尼DCR-HC52E和松下NV-GS55各一台,用于拍摄标定框架和跟踪拍摄运动目标。
标定框架两套,一套(Peak)应用于摄像机的标定和参考坐标系的确定,一套(自制)应用于全站仪测量和录像解析得到的三维空间绝对坐标数据的对比分析,两套框架上各有控制点(球)24个,每个球的直径35mm。
Topcon GPT-3002N全站仪一台,控制点目标观测与坐标框架换算软件系统和笔记本计算机一台,用于控制点目标观测与坐标转换。
自加工的附加控制点(球)一套共20个,本次实验使用14个,球的直径70mm,标准的三角架螺口,可根据现场的条件,以三角架、吸盘、卡夹等形式安装在必要的空间位置。
用于二维录像分析标定的L型架一套,两端点到交点的实际长度均为1.2m。
2.3 实验现场的布置
根据SIM IMotion三维扫描跟踪录像分析系统的要求,在两台摄像机扫描跟踪运动目标的同时,要确保在拍摄的画面中有2个以上的附加控制点,所以,在本次实验所安置的14个附加控制点(球)位置,通过左、右两台摄像机扫描取景确认,每个画面背景中都至少有3个以上的控制点。
主标定框架(Peak框架)安放在场地的中央位置,并以主框架坐标系为本次实验的坐标系,副框架安放在主标定框架的左侧,所有14个附加控制点和副框架上的24个控制点的三维空间坐标都将在主框架坐标系中分析和讨论。
左、右两台摄像机在主框架坐标系的空间位置可通过SIM IMotion三维运动录像分析系统解算得到(表1),图1是实验现场布置示意图。
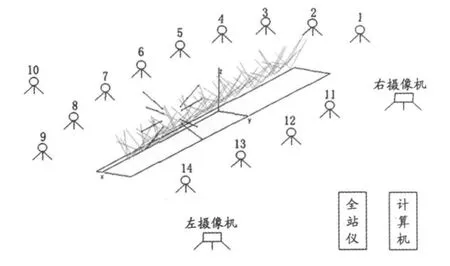
图1 实验现场布置示意图

表1 左,右两台摄像机在主框架坐标系的空间位置一览表(m)
2.4 附加控制点三维空间坐标测量
使用Topcon GPT-3002N全站仪和控制点目标观测与坐标换算软件系统对14个附加控制点和副框架上的24个控制点进行目标观测测量,并将坐标值转换到主框架坐标系中,具体测量的结果如表2和表3所示。
2.5 运动目标的录像扫描跟踪拍摄
首先,左、右侧摄像机拍摄主标定框架,用以求解直接线性变换法的11个转换系数。然后,左、右侧摄像机摇头并变焦拍摄副框架,其目的就是通过影像解析得到的24个控制点的空间坐标与全站仪测量得到空间坐标进行对比分析。最后,让一名受试者手持二维录像分析标定L型架由右向左走动,走动距离约10m,在走动的过程中,让受试者随意摇动二维录像分析标定L型架,与此同时左、右侧摄像机摇头并变焦扫描跟踪拍摄,拍摄频率为25fps,并确保所拍摄的运动画面中至少有2个以上的附加控制点可视(图2)。
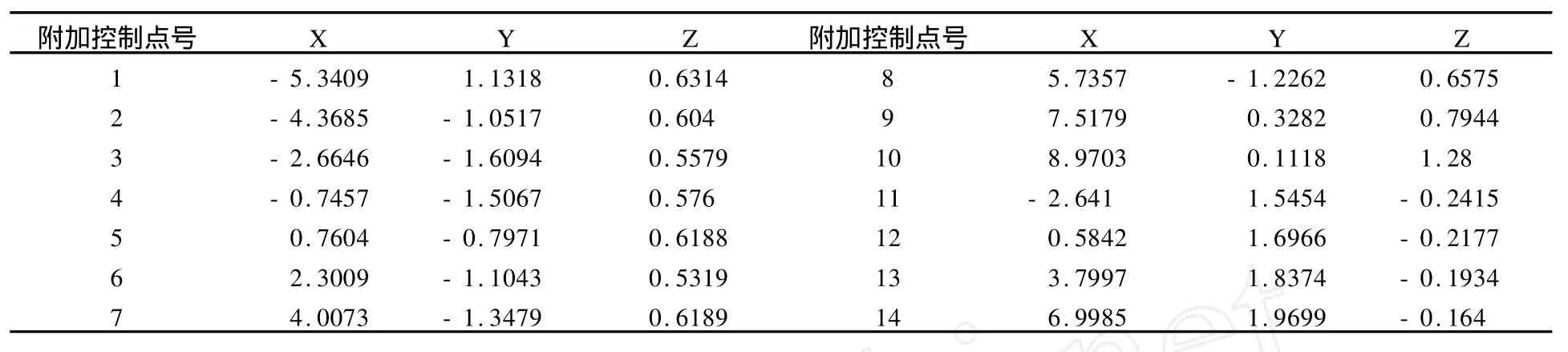
表2 附加控制点在主框架坐标系中的坐标一览表 (m)
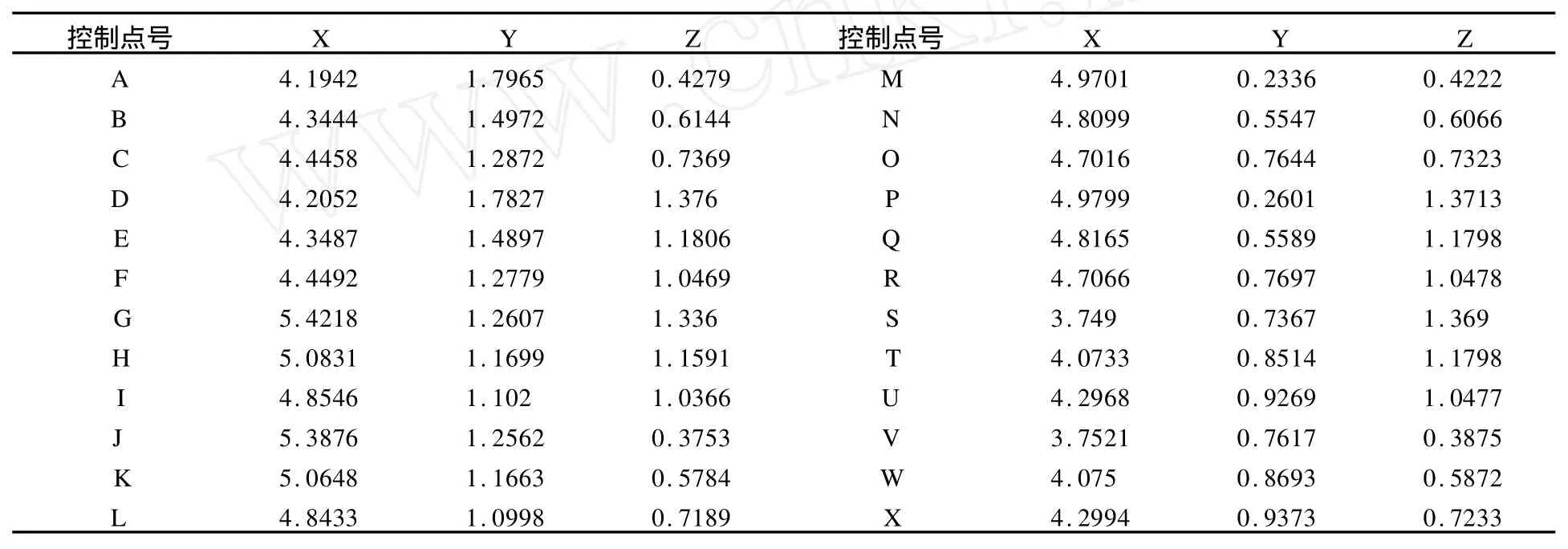
表3 副框架控制点在主框架坐标系中的坐标一览表 (m)
此拍摄的目的是在运动的条件下,通过三维扫描录像分析系统解析计算端点L型架两端点到交点的长度与实际长度(1.2m)进行对比分析。

图2 左、右侧摄像机跟踪扫描拍摄运动画面截图
3 运动目标录像的空间三维实际坐标解算
应用SIMIMotion三维运动录像分析系统的PTZ功能对视频图像的解析与三维定点的图像解析过程基本一样,惟一不同点就是在完成对模型所定义的点解析后,还要解析至少2个附加控制点。附加控制点的空间坐标数值(表2)可以事先输入到数据库中(图3)。在解析时根据在画面中出现的实际附加控制点,在数据库中进行选择并解析。左、右摄像机拍摄画面解析的附加控制点可以相同,也可以不同。
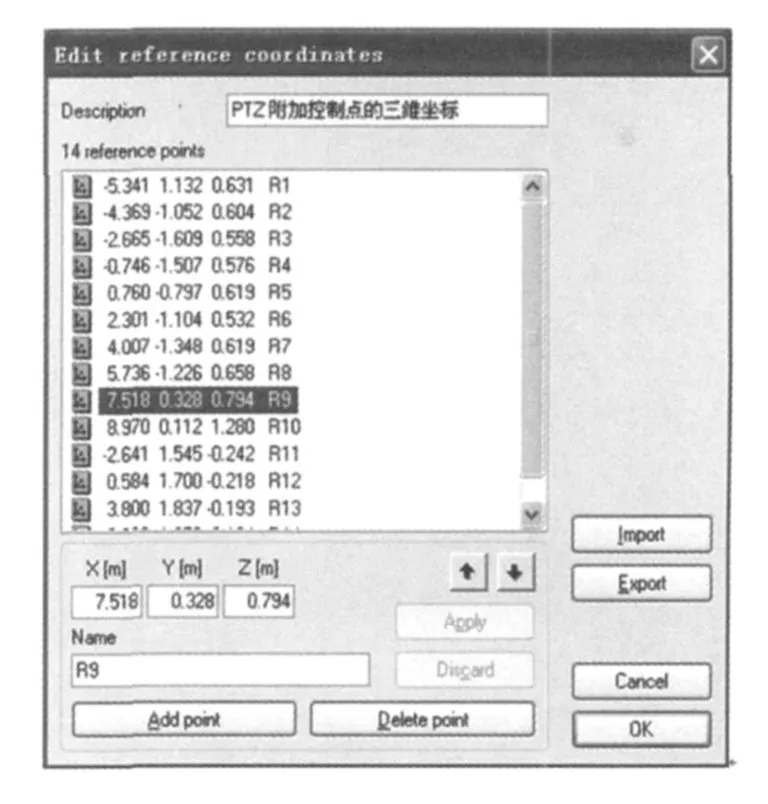
图3 附加控制点三维坐标输入界面示意图
3.1 副框架控制点三维坐标解算
对副框架24个控制点共重复解析11次,在经三维数据转换后,24个控制点的三维坐标数据以原始形式输出,不做任何数据平滑处理,副框架控制点三维重构示意图如图1所示。
3.2 L型架长度的三维影像分析解算
在SIMI三维运动影像分析系统中将L型架两端点分别定义为P1和P3,交点定义为P2。对P1、P2和P3进行解析(图4),共解析962幅运动画面,L型架在参考坐标系X轴方向上的移动距离约10m。在经三维数据转换后,可得到解析点P1、P2和P3的三维空间坐标,并以原始形式输出,不做任何平滑处理。由解析点P1、P2和P3计算得到的L型架三维重构示意图如图3所示。
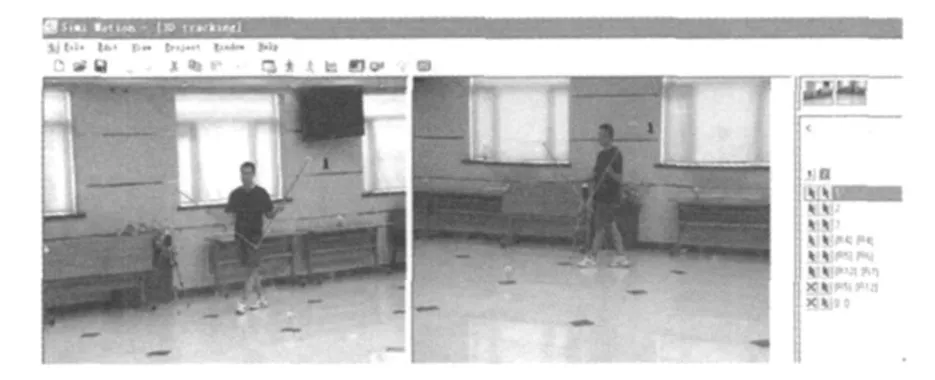
图4 L型架运动扫描跟踪录像解析的界面示意图
应用影像分析系统所提供的空间两点间距离的计算功能可得到P1到P2、P2到P3的实际空间距离,即两杆的长度,分别以L12和L23表示。
4 影像测量的精度分析
测量误差分析分两个方面来讨论。首先,以全站仪测量得到的数据为基准,并将三维扫描跟踪影像解析得到的副框架24个控制点的三维空间坐标与其比较,以验证三维扫描跟踪影像分析系统的可靠性和数据的准确性;然后,对在移动距离约10m的L型架经三维扫描跟踪影像解析得到的L12和L23测量数值与实际的真值1.2m进行比较分析,以验证在动态的条件下三维扫描跟踪影像系统测量数据的精度。
4.1 空间绝对坐标误差分析
表4是影像解析得到的副框架控制点三维空间坐标的数据,从各控制点的标准差来看,解析的重复性是比较好的。由于副框架控制点三维空间坐标的真值是不可能测量得到的,这里假定,通过全站仪测量得到副框架控制点三维空间坐标更接近实际的真值,并以此作为判断影像分析得到的副框架控制点三维空间坐标数据精度的基础。表5给出的是影像分析和全站仪(表3)测量得到的控制点三维坐标数据的差值。
△XYZ表示通过两种测量方法得到的控制点(球)中心点坐标的空间距离。由表5可知,24个控制点的△XYZ平均值为0.0179m,标准差为0.0028m,最大值为0.0238m(S点),最小值为0.0109m(Q点)。根据表2可计算得到副框架24个控制点到左摄像机的空间距离在8.11~9.54m之间,到右摄像机的空间距离在11.04~12.68m之间,从拍摄距离的角度来分析,摄影测量的偏差△XYZ是很小的。

表4 影像解析得到的副框架控制点的三维空间坐标一览表 (n=11,m)
4.2 空间动态相对误差分析
图5是影像分析得到的L12和L23的长度测量数据,由于L12和L23的实际长度已知为1.2m,所以,可以对影像动态分析的误差进行分析。表6是L12和L23的长度数据误差。L12和L23的三维影像测量长度分别为1.215±0.009m和1.211±0.008m(n=962);误差平均值分别为0.0154±0.0107和0.0105±0.0081;这说明L23的测量精度要比L12高。图6也从测量误差频次分布方面说明了这一点,图的横坐标表示误差的等距间隔,如5mm表示测量误差<5mm;10mm表示测量误差≥5mm并<10mm,以此类推;纵坐标表示在某一误差范围内测量误差所出现的频次。

表5 影像分析与全站仪测量得到的控制点三维坐标数据的差值一览表 (m)
根据统计学原理[7],L12和L23的误差平均值加1.64倍标准差的值分别为0.0329m和0.0236m,这表明对于L12和L23的来说,95%测量值的误差绝对值分别小于0.0329m和0.0236m,其相对误差分别为2.74%和1.97%,而L23的相对误差小于2%,由此可知,三维扫描跟踪影像测量的相对误差是能够控制在2%以内,可以满足运动技术三维影像分析的精度要求。
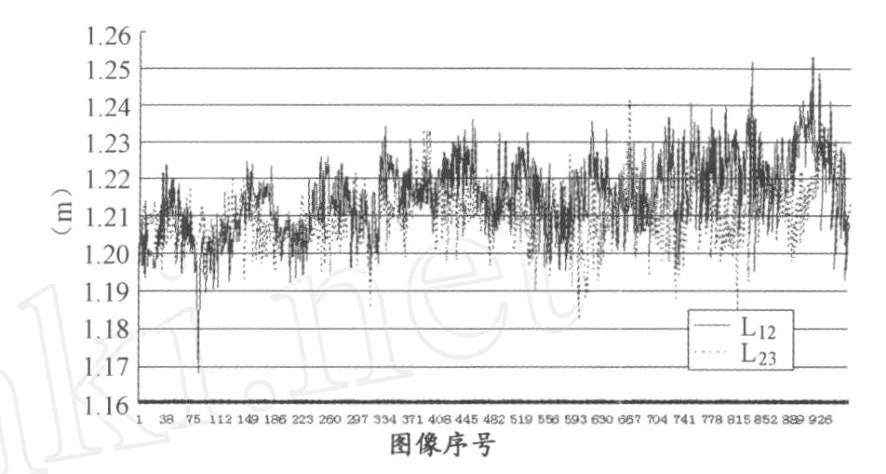
图5 影像分析得到的L12和L23的长度测量数据示意图
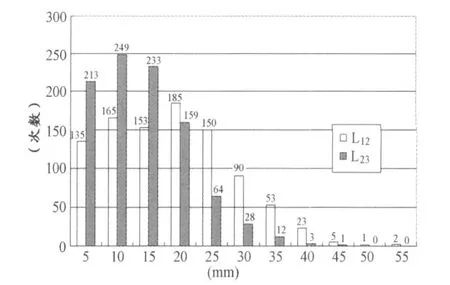
图6 L12和L23的测量误差频次分布示意图
从图5可以看到,L12和L23的误差呈增加的趋势,那么,是什么原因导致了这样的结果?笔者注意到,在拍摄录像的过程中,左侧摄像机在跟踪拍摄L型架的同时镜头焦距变焦,以保持L型架在画面中的大小,而右侧摄像机则没有,随着L型架远离右侧摄像机,L型架在画面中的成像越来越小。有研究的结果表明,在二维平面摄像的条件下,物体在画面中所占比例越大,测定坐标的误差平均值越小[5]。

表6 L12和L23的长度数据误差一览表 (n=962)
为了验证三维跟踪扫描摄影测量过程中,左、右摄像机拍摄的L型架成像大小与L12和L23的测量误差的关系,从SIM IMotion三维影像分析系统分别输出左、右摄像机P1、P2和P3解析点的像坐标数据P′1(x1i,y1i),P′2(x2i,y2i)和P′3(x3i,y3i),i=1,2,3…,962,根据公式:

可计算出由P′1,P′2和P′3点所构成的三角形的面积,并以此作为成像大小的参数指标。对于左、右侧摄像机此参数分别以AL和AR来表示.
图7是左、右侧摄像机拍摄的L型架的面积参数AL和AR的变化趋势图,它从数值上说明了在跟踪扫描拍摄录像的过程中左侧摄像机基本保持了L型架在画面中的成像大小,而右侧摄像机拍摄的L型架的成像越来越小。
表7是面积参数与L12和L23的测量误差的相关系数表,均为负相关。L12的误差与面积参数AR的相关系数为-0.522,P<0.001相关具有高度显著性。这说明L12的误差的一个主要的来源是右侧摄像机拍摄的成像较小引起的。这从一个侧面提示,在进行扫描跟踪摄影测量时,要尽量使得所拍摄物体的成像较大,从而可减小测量误差,提高数据的精度。

图7 左、右侧摄像机面积参数AL和AR的变化趋势示意图

表7 面积参数与测量误差的相关系数一览表 (n=962)
4.3 提高摄影测量精度的途径
测量误差主要是由系统误差和随机误差所构成。对于三维跟踪扫描摄影测量来说,系统误差主要由成像系统的分辨力、成像系统的几何畸变和处理算法的精度所决定的[4];随机误差主要是由对控制点的全站仪的观测测量、扫描跟踪录像的拍摄方法和对运动图像解析的人员操作导致的。控制或减小测量误差可从以下几方面来考虑:
4.3.1 提高成像系统的分辨力
运动生物力学的三维运动录像拍摄大都采用普通DV数码摄像机,它的PAL制标准数字图像的分辨率是720像素×576像素。目前市场上已有全高清的数码摄像机,它的分辨率可达1 920像素×1 080像素,采用这样的摄像机拍摄运动的图像可极大提高成像系统的分辨力。
4.3.2 控制成像系统的几何畸变误差
成像系统的几何畸变误差主要是指成像系统不能使图像与实际景物在全场严格满足针孔成像模型(或中心投影关系),使中心投影射线发生弯曲。一般来说,图像中心附近的几何畸变要比图像边缘小,所以,在拍摄运动图像时,应尽可能地将被拍摄物体置于画面的中心。与三维定点影像分析不同,由于三维跟踪扫描摄影测量的摄像机可以跟踪运动目标拍摄录像,所以,能够保证将运动物体拍摄到画面的中心附近。
4.3.3 重复观测测量,减少人为误差
对于扫描跟踪影像三维测量来说,附加控制点的准确度对于解析分析系统的数据转换精度有着重要的影响,而附近控制点的测量是由全站仪来完成的,不可避免地会产生人为的观测误差。在时间允许的情况下,对附加控制点的测量应重复观测多次,取平均值,这样可以尽量的减小人为观测所产生的误差。
4.3.4 提高录像拍摄的操作能力
由上面的讨论可知,运动录像的拍摄在两个方面影响着测量的误差:一是,物体的拍摄成像是否在图像的中心附近;二是,在成像要尽可能地大的同时要将至少2个附加的控制点拍摄到画面中。这就要求在三维扫描跟踪影像拍摄的过程中,操作人员要熟悉所拍摄运动项目的特点以及附加控制点的分布情况,并对录像的拍摄有较强的操作能力。这样就可以尽量地减小在后期的图像解析过程中由于图像拍摄所产生的误差。
5 结论
1.应用全站仪观测测量和三维扫描跟踪影像测量两种测量方法对空间分布的24个点(球)的空间三维坐标进行观测、解析和计算,数据对比显示,两种测量方法所得结果的平均偏差为0.0179±0.0028m(n=24),说明本研究所应用的三维跟踪扫描影像分析方法是可靠的。
2.对已知长度的杆的三维跟踪扫描影像分析结果表明,本方法相对测量误差可以控制在2%以内,可以满足运动技术分析的精度要求。
3.跟踪扫描影像拍摄运动物体的成像大小对三维解析数据结果的精度有较大的影响,在实际运动图像跟踪扫描拍摄过程中要注意运动物体的成像尽可能地大,以提高数据的测量精度。
[1]艾康伟,何申杰,何伟,等.运动技术大范围三维运动学分析——以花样滑冰双人抛跳动作为例[J].体育科学,2002,22(4):135-137.
[2]艾康伟,贵慧宏,王博伟,等.三维影像分析控制点测量与坐标转换软件系统的设计与实现[J].体育科学,2011,31(1):39-41.
[3]陈及治.体育统计[M].北京:人民体育出版社,2002:77.
[4]于起峰.摄像测量学原理与应用研究[M].北京:科学出版社,2009:13-20.
[5]郑秀瑗.现代运动生物力学[M].北京:国防工业出版社,2002:30.
[6]CH RASCHNER.Dynamic and Kinematic Analysisi of the Giant-Slalom Technique of Top Ski Racers[M].SPECTRUM Suppl,1999.
[7]DRENK VOLKER.Bildmeβverfahren für schwenk-und neigbare sow ie in der rennweite variierbare Kameras[J].Schriftenreihe zur Angewandten Trainingswissenschaft,1994,(1):130-142.
[8]DAN IEL REYHER.3D kinemetrische Bewegungsanalyse im Kanurennsport für die Bootsgattung Einercanadier[M].Diplomarbeit,Leipzig,2007.
[9]MARTIN MOESSNER,PETER KAPS,WERNER NACHBAUER.A method for obtaining 3-D data in Alpine skiing using pan-and-tilt cameras with zoom lenses[EB/OL].http://sport1.uibk.ac.at/mm/DLT/dlt.ps.
