跳马过程中人-器械动力学关系的研究
2011-03-06吴成亮郝卫亚
吴成亮,郝卫亚
体操跳马是人们十分喜爱的运动项目,目前,跳马动作类型主要分三类,即后手翻类、前手翻类、侧手翻类跳马动作[1],发展的重点是推手后的第二腾空,但发展的动作类型明显向踺子倾斜。踺子类动作由8个阶段组成:助跑、趋步、踺子、踺子踏跳、第一腾空、推手、第二腾空和落地[8];“踺子转体180°”类动作发展空间很大,在此后可以连接“团身前空翻”、“屈体前空翻”以及“直体前空翻”三大类共10个动作[2],优秀运动员可以根据自身条件在现有的基础上创造新难动作,所以,“踺子转体180°”类跳马动作具有很好的研究价值。为获得最佳表现,体操运动员需要依照竞技体操评分规则,利用运动生物力学规律,进行训练和比赛。因此,分析技术动作的优劣的一个重要依据,就是探讨动作是否符合生物力学规律,运动员的相关力学指标是否有利于运动员技术动作的发挥。
从跳马动作力学角度来看,运动员从助跑获得动能,水平方向上的冲量;踏跳和撑马时将水平方向上的冲量转化为垂直方向上的动量和角动量,也把动能转化为一部分势能;不仅如此,在踏跳、撑马时运动员还依靠自身力量主动蹬踏踏板、推撑跳跃平台,所以,跳马过程中人与器械相互作用力十分重要。尽管如此,由于受到技术手段的限制,目前有关体操跳马技术动作的研究都仅限于运动学研究,有关跳马过程中人与器械间的动力学研究还鲜见详细报道。Yeadon(2003)曾建立了体操吊环项目中向后大回环动作的三维人体模型[10],真实地模拟了此动作的全过程;Mills等(2009)对一名男子体操运动员跳马落地进行了仿真研究[9],获得了落地垂直反作用力峰值及达到峰值的时间。本文建立了跳马过程中人—器械动力学关系的研究方法,探讨“踺子转体180°”类跳马动作在踏跳和推马阶段的运动技术特征,以期为这类跳马运动训练提供科学的理论依据。
1 方法
1.1 研究对象与动作
本文研究对象为2名世界优秀女子体操跳马运动员。程菲,中国,1988年5月出生,身高152cm,体重41kg,采用“程菲跳”(踺子类)动作连续3届(2005—2007年)在世界锦标赛中获得跳马冠军。洪淑贞,朝鲜,1986年3月出生,身高154cm,体重42kg,在第29届奥运会上采用“程菲跳”动作获得金牌。研究动作为她们在第29届奥运会测试赛“好运北京”国际邀请赛所完成的“踺子转体180°前手翻接直体前空翻转体180°”(本文简称为“R180”)。
1.2 研究方法
1.2.1 仪器
Troubleshooter高速摄像机两台(美国,FASTEC&IMAGING公司);Peak三维框架,对三维空间坐标进行标定;SIMI MOTION运动解析软件(德国,SIMI公司),对视频录像进行解析,获得人体三维运动坐标、速度等运动学数据。
Python脚本语言(版本:2.5),用它编写脚本程序,将解析获得的人体运动轨迹的TXT文本文件数据、人体形态参数等转换成仿真软件可以直接识别的SLF格式数据文件。
MSC.ADAMS多体动力学仿真软件(美国,MSC公司,版本:2007R2),LifeMod为它的人体仿真模块,专门用于分析人体动力学的问题。利用该软件,可以构造从局部到整体的人体结构模型,模型可包含骨骼、肌肉、韧带、关节等子系统,模型可以通过人体各部位的肌肉进行驱动,或是通过各种控制方案进行驱动,也可以通过施加外部环境影响而考察人体各部分的运动和动力反应。笔者通过运动学解析得到的人体运动轨迹,以此驱动模型的运动。驱动方法如下:MSC.ADAMS/LifeMod建立了19环节的人体模型,关节之间采用不同自由度的铰链连接,以右肘关节为例(图1),右上臂通过一个作用在额状面的旋转副与右肘D1点相连,右肘的D1点通过一个在水平面的旋转副与右肘D2点相连,右肘D2点通过一个作用在水平面的旋转副与右前臂相连,这就是右肘关节的运动学拓扑结构,D1和D2非常接近,可认为是关节中心,再通过运动学解析获得右肘关节运动轨迹坐标与关节中心进行匹配,根据多体动力学原理,利用带乘子的拉格朗日计算方法,来驱动人体模型中右肘关节的运动,用同样的方式可以驱动其他关节的运动,从而可以驱动整个人体模型的运动。
1.2.2 方法
1.对程菲和洪淑贞在“好运北京”国际邀请赛上完成的“R180”跳马动作进行三维运动学分析,Troubleshooter高速摄像机拍摄,2台摄像机同在跑道一侧,夹角约70°,拍摄采用Peak框架进行三维标定,利用外同步对动作进行同步处理。拍摄频率为250帧/s,采用SIMI MOTION软件进行解析,从而获得人体运动轨迹坐标、速度等运动学数据。
1.Chongqing Three Gorges University,Chongqing 404100,China;2.China Institute of Sport Science,Beijing 100061,China.
2.编写基于Python脚本语言的接口软件,结合人体解剖和生物力学特点,输入人体形态学和人体生物材料学参数,并且对运动学分析所获得的运动学数据进行转换,生成MSC.ADAMS/LifeMod软件可识别的SLF格式数据文件。在MSC.ADAMS/LifeMod中,有一个人体模型数据库程序Gebod(Generator of Body Data),这个程序可以根据人的性别、年龄、身高、体重,利用回归方程计算得出人体形态学参数(环节长度和围度)、人体惯性参数(环节质量、质心和转动半径)和人体生物材料学参数(环节刚度和阻尼系数)。

图1 本研究右肘关节的运动学拓扑结构示意图
3.根据多体动力学原理,利用MSC.ADAMS/LifeM-od软件建立19环节的人体模型(图2),模型包括头、颈、上躯干、下躯干、骨盆、左右肩胛骨、左右上臂、左右前臂和手、左右大腿、左右小腿和足19个环节,环节之间由不同自由度的铰链连接,共有52个自由度;然后通过Python脚本语言的接口软件,将人体三维运动坐标赋予人体模型,并根据体操器械中国国家标准建立与人体相接触的助跳板[3](国标:GB/T 23121-2008)、跳跃平台(马)[4](国标:GB/T 8393-2007)跳马器械,体操器械具有与实际相近的弹性性能(图3)。
4.对“R180”进行计算机仿真,获取人与跳马环境接触的垂直反作用力,进行对比分析。
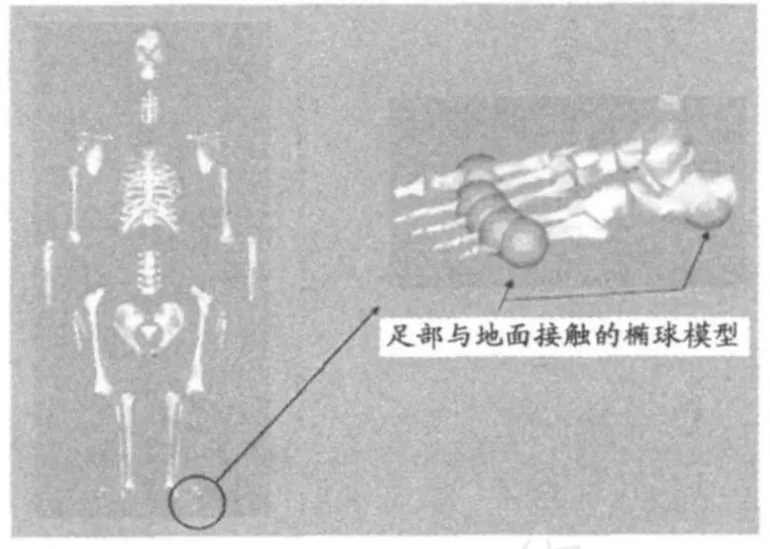
图2 本研究人体简化模型示意图
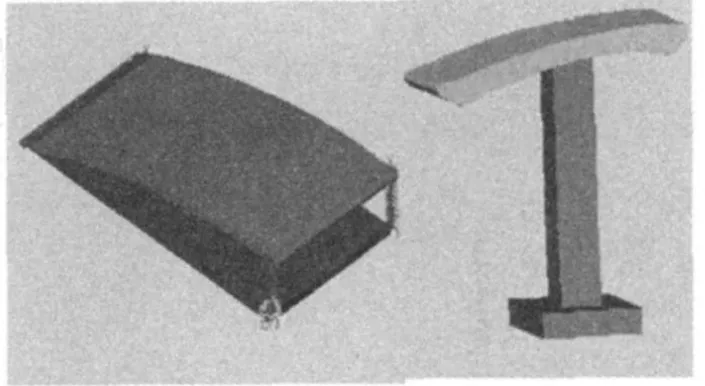
图3 本研究跳马器械简化模型示意图
2 结果
对程菲、洪淑贞的“R180”跳马动作进行计算机仿真后,获得两人与助跳板、跳跃平台(马)接触时的垂直反作用力及其冲量特征。

图4 程菲(左)和洪淑贞(右)踏跳阶段垂直反作用力示意图
图4是程菲和洪淑贞在跳马踏跳阶段双脚与助跳板接触时垂直反作用力。程菲的垂直反作用力峰值为2 382N,洪淑贞的为2 692N,将其转化为体重倍数(BW)时,程菲和洪淑贞两人垂直反作用力峰值分别为5.9BW和6.5BW,这表明两人跳马在踏跳阶段,垂直反作用力无论是绝对大小还是相对体重大小,都是洪淑贞的更大。程菲在开始踏跳阶段垂直反作用力-时间曲线出现了一个短暂的小平台期,洪淑贞没有出现。
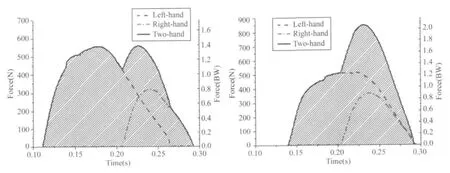
图5 程菲(左)和洪淑贞(右)推手阶段垂直反作用力示意图
图5为程菲和洪淑贞在跳马推马阶段手与跳跃平台(马)接触时垂直反作用力。程菲和洪淑贞在此阶段双手垂直反作用力合力峰值分别为556N(1.4BW)和846N(2.1BW),洪淑贞高出程菲约1/3,另外,从图形来看,程菲垂直反作用力曲线呈双峰型,洪淑贞垂直反作用力曲线呈单峰型。
3 分析讨论
计算机仿真是生物力学中的一种研究方法,一般在无法或很难做实体实验的条件下,获取相关的力学指标,并分析相关的力学关系。在本研究中,人体模型是根据研究对象建立的;体操器械(助跳板和跳跃平台)是根据体操器械的相关国际标准(中国国标是国际标准的中文版)建立的,它们都具有弹性性能。本文通过计算机仿真方法,获得人与体操器械的接触力;这些指标都无法通过实体实验方法在比赛条件下测量获得。本文中的坐标系都是以大地为基准坐标系,建立垂直、左右和前后方向,仿真研究获得了3个方向的力,还有其他很多力学指标。运动员垂直方向上的力的变化,影响着运动员腾空高度和时间,是运动员完成跳马技术动作的关键因素。因此,本文主要针对垂直方向的作用力进行研究。在实际仿真过程中,无论跳马器械是否有角度,都可以在仿真软件中获得垂直方向的作用力。根据作用力和反作用力原理,考察垂直反作用力,是可以反映人体用力所产生的效果情况的。本文从程菲和洪淑贞跳马的踏跳、推马2个阶段,对跳马过程中运动员与器械垂直反作用力进行对比分析。
3.1 踏跳阶段

其中,Vf是末速度,Vi是初速度,冲量是引起一个物体运动变化的量。洪淑贞的冲量大,说明洪淑贞踏跳阶段垂直速度变化量大,离板后的动量也大,又因为此阶段踏跳前、后垂直速度方向相反,所以洪淑贞在离板后有比程菲更大的垂直速度,这和运动学得出来的结果是相一致的(洪淑贞和程菲两人在离板瞬间垂直速度分别为3.92m/s和3.87m/s[7])。
在本研究计算机仿真动画中,可以明显观察到助跳板的弹性形变,并且可以看到运动员的双脚是同时着板和离板的,左、右脚垂直反作用力无明显差异,所以,本文没有将左、右脚分开进行研究,而是将双脚垂直反作用力合在一起分析。但值得注意的是,程菲垂直反作用力在踏跳阶段出现了一个短暂的小平台期,而洪淑贞没有,结合两者的视频录像分析,程菲在踏跳瞬间身体已经完成一定转体,即身体和助跳板的左右方向存在明显夹角,踏跳的同时身体继续转体,这与郝卫亚等[5](2007)对“程菲跳”运动学分析所得的研究结果一致。郝卫亚等(2007)发现,程菲在踏跳阶段,两脚踏在重心投影线后面,前脚掌着板,脚尖偏左侧45°。笔者认为,程菲在踏跳的某一阶段身体出现了一个小的调整,所以才会出现如图3中垂直反作用力-时间曲线的小平台期;洪淑贞在踏跳瞬间,身体和助跳板左右方向基本没有夹角,且在踏离板瞬间才出现身体的转动,洪淑贞踏跳阶段垂直反作用力-时间曲线基本左右对称。对比程菲和洪淑贞两人的踏跳技术,笔者发现,踏跳力并非越大越好,运动员在踏跳同时的一定量转体减少了第一腾空转体难度,可能也减少了踏跳力大小,这对于踏跳技术好坏无明显影响。
3.2 推马阶段
程菲垂直反作用力呈双峰型,两峰值接近,分别为553N和556N(图5)。前一峰值是左手推马时出现的,其大小全部由左手贡献,后一峰值是右手推马后出现的,其大小由左手和右手一起贡献,整个推马阶段,右手最大垂直反作用力为316.7N,仅为左手的57%,冲量为17.5N·s,也仅为左手的1/3。所以,程菲左手推马是垂直反作用力的主要来源,右手推马为次要来源,但右手推马对身体在马上方的控制起关键作用,保证身体呈倒立位时不会绕其横轴过度翻转,影响到第二腾空的技术动作。
洪淑贞垂直反作用力呈单峰型,出现在右手推马后,峰值为846N,约为程菲推马的1.5倍(图5);程菲和洪淑贞在此阶段的垂直冲量分别为72.8N·s和75.3N·s,二者相近,根据动量定理,两人推马阶段垂直速度损失也相近,由于洪淑贞在触马前的垂直速度比程菲的小0.55m/s[7],所以,程菲在离马瞬间的垂直速度要高于洪淑贞。离马瞬间身体重心垂直速度决定了第二腾空高度,因此,程菲有更高的第二腾空高度。
值得注意的是,观察两人垂直反作用力曲线可以看到,洪淑贞推马阶段的双手用力顺序为:左右手依次推马,过渡到双手推马,再双手离马,为通常说的“晚旋”(指运动员在脱离器械或地面后,先只有绕身体横轴翻转,而没有绕身体纵轴旋转[6]);而程菲推马阶段的用力顺序为:左手推马、右手推马、双手推马、左手离马、右手离马,近似一种“滚动式”撑马技术,根据高速录相分析,程菲在推马阶段中有绕身体纵轴旋转迹象,即“早旋”现象(相对“晚旋”而言),这种“滚动式”推马有利于在推马阶段就完成一定量的转体。郝卫亚等(2007)对“程菲跳”运动学分析[5]以及姚侠文等(2005)对李小鹏跳马踺子转体180°前手翻直体前空翻转体900°的运动学分析中[8],推马动作都是这种“滚动式”方式,这样既可以为第二腾空转体做好准备,同时也可以分担一部分第二腾空的转体圈数,这一技术对于完成高难度、多圈数的转体动作具有一定意义。但是,这种“早旋”现象的发生,推马时就产生了一个旋转力矩,会牺牲一部分向上推马的力。比较两人推马垂直反作用力大小可知,“早旋”现象的出现减小了程菲向上推马动力,影响第二腾空高度;而且国际体操联合会(FIG)在体操跳马专项完成扣分上规定:推马阶段,规定的纵轴转体开始过早,E组裁判会扣0.1~0.5分[2]。
尽管本研究中程菲第二腾空高度大于洪淑贞的,那是因为程菲踏跳及第一腾空技术动作完成更好,推离马瞬间垂直速度更大。笔者反复观察研究程菲在第29届奥运会女子跳马单项决赛视频,程菲的第二跳为“踺子转体180°前手翻直体前空翻转体540°”(“程菲跳”),和本文研究的跳马属同一类型,难度更高。她在推马中也出现了“早旋”现象,导致推马动力不足,虽然空中转体基本完成,但由于第二腾空高度空间不够,导致她最后双膝跪地,落地失败,也失去了这枚跳马金牌。
所以,对比程菲和洪淑贞两人的推马技术,洪淑贞的推马技术动作更为合理。程菲的推马技术动作存在一定问题,其推马阶段出现了纵轴转体开始过早现象,尽管这种技术动作有利于第二腾空转体,但这违反了体操跳马规则,也影响到了第二腾空高度,这是值得注意和深思的。
综上所述,本文利用三维高速摄影这一运动生物力学较为成熟的手段,解析获得人体运动三维坐标,再基于MSC.ADAMS/LifeMod软件,通过建模与仿真来研究跳马运动员与器械的动力学关系,分析并揭示这类跳马动作在踏跳和推马阶段的运动技术规律。本文建立了适合于女子跳马技术动作分析的人体多体系统模型,并建立了基于三维影像学分析的跳马动力学分析的计算机仿真方法,该方法能较真实地反映跳马技术动作特征。
4 结论
“踺子转体180°”类跳马动作,踏跳阶段,运动员踏跳同时的一定量转体减少了第一腾空转体难度,可能也减少了踏跳力大小,这对于踏跳技术好坏无明显影响;推马阶段,不要使身体纵轴转体开始过早,这可能会导致向上推马动力不足,影响第二腾空高度。提示,完善踏跳和推马的技术,是练习这类跳马动作的关键。
[1]关朝阳,李柳,孟宪林.从“程菲跳”看世界女子跳马的发展特点[J].中国体育科技,2006,42(4):65-68.
[2]国际体操联合会.女子竞技体操评分规则[Z].2010.
[3]GB/T 23121-2008.中华人民共和国国家标准助跳板[S].
[4]GB/T 8393-2007.中华人民共和国国家标准跳跃平台[S].
[5]郝卫亚,姚侠文,庞乐.“程菲跳”运动学分析[J].中国体育科技,2007,43(6):67-70.
[6]钱竞光.体操运动生物力学[M].南京:江苏科学技术出版社,2008:28-82.
[7]吴成亮,郝卫亚,庞乐.踺子转体180°前手翻接直体前空翻转体类跳马动作的运动学分析[J].中国体育科技,2009,45(4):42-45.
[8]姚侠文,纪仲秋,徐元玉.李小鹏跳马踺子转体180°前手翻直体前空翻转体900°的运动学分析[J].北京体育大学学报,2005,28(5):595-596.
[9]MILLS C,PAIN M T G,YEADON M R.Reducing Ground Reaction Forces In Gymnastics’Landings May Increase Internal Loading[J].J Biomech,2009,42:671-678.
[10]YEADON M R,BREWIN M A.Optimized Performance Of The Backward Longswing On Rings[J].J Biomech,2003,36:545-552.
