基于联合仿真的汽车操纵稳定性分析及控制研究
2011-03-03冯樱王保华
冯樱,王保华
(湖北汽车工业学院 汽车工程系,湖北 十堰 442002)
基于联合仿真的汽车操纵稳定性分析及控制研究
冯樱,王保华
(湖北汽车工业学院 汽车工程系,湖北 十堰 442002)
将多体系统动力学与模糊控制理论相结合对汽车稳定性控制(VDC)系统进行了研究。基于ADAMS/CAR建立整车多体动力学模型;研究汽车在不同行驶工况下,行驶稳定性参数的变化;利用Matlab/Simulink模糊控制工具箱建立稳定性模糊控制策略;通过ADAMS与Matlab间的数据接口将控制系统与整车动力学模型结合,对带有VDC系统的汽车进行典型行驶工况仿真试验。仿真结果表明:VDC系统通过差动制动模糊控制能够提高汽车的操纵稳定性。
稳定性控制;联合仿真;模糊控制;差动制动
0 引言
车辆动力学稳定性控制 (Vehicle Dynamic Control,VDC)是在ABS和TCS的基础上发展起来的,通过对左右制动力的差动制动控制,直接给汽车提供横摆力矩,使车辆的行驶尽可能地与驾驶员的意图相符合,抵消了汽车的不稳定运动,使汽车的操纵稳定性得到提高[1]。VDC作为一种先进的主动安全技术已在国外众多高级轿车上普遍应用。
车辆动力学稳定性控制方法有逻辑门限值控制、PID控制、模糊控制、滑模变结构控制以及H∞控制等[2]。逻辑门限值控制是一种经典的控制方法,其系统可靠,结构简单,被大多数车辆采用,但其控制效果依赖于长时间、耗费大的实车试验进行参数匹配[3]。PID控制简单实用,精度较好,但鲁棒性差,实施成本也较高。滑模变结构控制控制在处理模型和未知干扰等不确定性因素方面具有很强的鲁棒性,缺点是由于控制量不连续切换引起系统在滑移面附近的高频颤振。H∞控制需要确定模型传递函数误差的上限,并且选择加权函数有一定难度。模糊控制属于智能控制,其特点是不需要建立被控对象的精确数学模型,是一种基于规则的控制,设计简单、鲁棒性强,适合非线性、时变及纯滞后系统的控制。由于车辆的横向稳定性受车辆结构参数、行驶速度、路面附着系数和转向盘输入转角等众多因素影响,是一个非线性问题[4],采用模糊控制与其他控制算法相比更简单实用。
本文首先在多体动力学软件ADAMS中建立了非线性整车多体动力学精确模型,为研究汽车在各种工况(甚至极限工况)下汽车的运动特性提供了基础;然后在Matlab/Simulink中建立VDC系统模糊控制策略,并通过ADAMS/Control模块将整车模型和控制模型进行集成,对典型工况实现联合控制仿真,验证控制算法。
1 整车多刚体动力学模型
基于ADAMS/Car模块的汽车整车建模采用由底层向顶层的建模方法。先制作模板,再创建子系统,最后装配成整车。整车模型包括麦弗逊前悬架、多连杆式后悬架、齿轮齿条式转向系统、发动机前置前驱的动力总成、盘式液压制动系统、车身及轮胎。充分考虑到前后悬架各机构间的非线性关系以及动力系统悬置和转向系统悬置刚度的影响,与实车一致,模型中使用了较多的衬套。轮胎模型利用国际上通用的Magic Formula模型建模,它是用三角函数的组合公式拟合轮胎试验数据,用一套形式相同的公式来完整地表达轮胎的纵向力、横向力、回正力矩以及纵向力、横向力联合作用等工况。本文采用得是PAC 2002轮胎特性文件。
整车模型由53个零件组成,模型的自由度为121,图1为整车模型。汽车满载时主要参数:整车质量为1880kg,绕z轴转动惯量为4865 kg·m2,轴距为2510mm,质心距前轴距离为1280 mm,质心高度为570mm,轮胎型号为195/65R15。
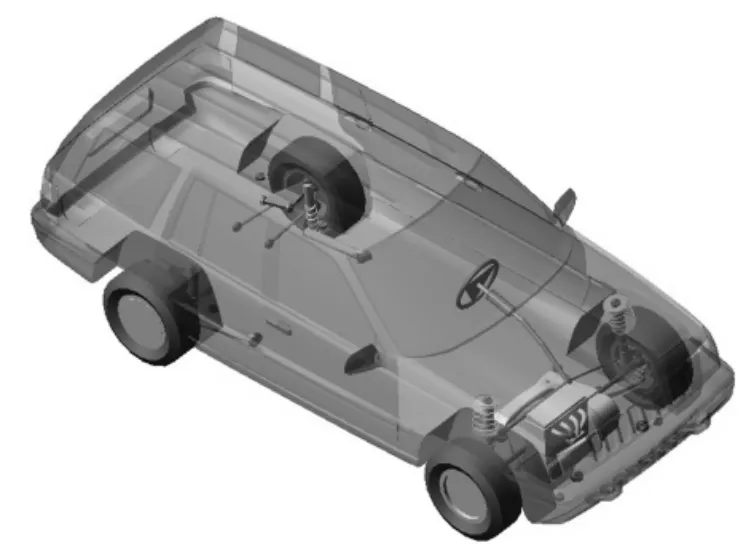
图1 整车模型
2 汽车稳定性参数分析
对所建模型进行不同工况下的单移线运动仿真,研究汽车稳定性参数的变化情况。
图2所示为在附着系数为0.8的路面上,初始车速为 90 km/h,前轮转角正弦输入的频率为0.33Hz、幅值为0.05rad、0.1rad、0.15rad、0.2rad的整车运动仿真曲线。图2a为汽车横向位移和纵向位移关系曲线;图2b和图2c分别为汽车侧偏角和横摆角速度随时间的变化曲线。由图2a可知,当前轮正弦输入幅值为0.1rad时,汽车的运动轨迹已偏离单移线轨迹,失去方向稳定性。造成偏离的原因是随着前轮转角的增加,汽车质心侧偏角在正弦输入的后半个周期内发生了较大变化,横摆角速度的变化曲线也偏离了正弦曲线。随着前轮转角正弦输入幅值的增加,质心侧偏角和横摆角速度的变化加剧,使得汽车行驶稳定性变差。
图3所示为在附着系数为0.8的路面上,前轮正弦输入幅值为4deg时,汽车以70km/h、90km/h、110km/h、130km/h车速做单移线运动的仿真结果。图3a为汽车横向位移和纵向位移关系曲线,图3b~c为汽车侧偏角和横摆角速度随时间的变化曲线。
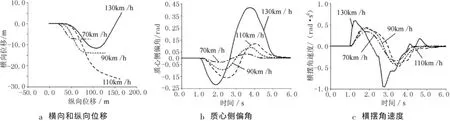
图3 不同车速的仿真曲线
3 控制系统的设计
如图3a所示,当车速较低时,随着车速的增加,汽车在转向盘正弦输入下,基本保持了单移线轨迹,车速为130km/h时,汽车方向急转,完全失去行驶稳定性,造成的原因由图3b~c可见,此时汽车质心侧偏角变化幅度急剧增加,横摆角速度曲线也严重变形。
综上所述,当转向轮转角较大、汽车车速过高行驶时,质心侧偏角和横摆角速度急变,致使汽车丧失操纵稳定性。为了提高汽车在各种工况下的行驶稳定性,使汽车保持预定的航道,有效的方法就是对汽车的质心侧偏角和横摆角速度进行控制。
3.1 系统方案设计
在ADAMS中建立的整车模型可以通过自带的Controls模块与Matlab软件进行联合仿真控制。汽车稳定性控制联合仿真的总体方案如图4所示。
图4中前轮转角δ和汽车初始车速v为仿真的初始条件。要实现联合仿真控制,首先,在ADMAS/CAR环境下、车身模块中定义状态变量,将侧向加速度、车速、横摆角速度设置为输出变量,变量名分别为v˙y、vL、ω;在制动模块中将左前和右后车轮的制动力定义为输入变量,变量名分别为FW1、FW4。输入变量的初始值均设为0,在仿真过程中,它们的值会被来自控制系统的输出值实时刷新。其次,通过ADAMS/Controls模块定义包含输入和输出变量的.m文件;之后,在Matlab中调用该.m文件及在ADAMS定义的包含仿真工况的整车模型系统文件,车辆模型即被调入到Matlab的Simulink中,在Simulink完成图4中的VDC控制模型设计和仿真参数设置后,便可实现ADAMS模型和控制程序之间的闭环控制。
图4中模糊控制器的控制目标是使实际的车辆质心侧偏角β和横摆角速度ω跟踪期望的质心侧偏角βd和横摆角速度ωd,以保证车辆良好的行驶轨迹和横向稳定性。Tz为模糊控制器输出的校正横摆力矩。
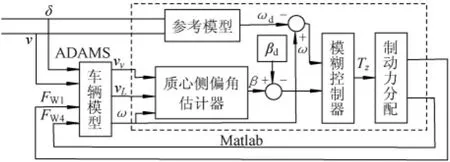
图4 稳定性控制系统设计方案
3.2 期望质心侧偏角和横摆角速度
VDC控制系统的期望横摆角速度ωd为前轮转角δ和车速vL的函数,根据线性2自由度参考模型[5],由式(1)计算得到:

式中,K为车辆的稳定性因数,取K为2×10-3s2/m2;L为车辆的轴距。
质心侧偏角β应控制在尽可能小的范围内,将期望的质心侧偏角取为零,即βd为0。
3.3 质心侧偏角估计
由于车辆实际质心侧偏角难以准确定义,目前对车辆质心侧偏角多采用估算的方法。本文由式(2)[6]计算质心侧偏角。
3.4 差动制动控制
差动制动控制是提高车辆横摆稳定性的一个有效方法。根据车辆运行条件,通过控制某车轮上的制动压力产生横摆力矩,车辆的横摆和侧向运动就能得到有效的控制。但是,在不同位置的车轮产生横摆力矩的能力是不一样。一般,左前轮产生的外向横摆力矩最大,能有效抑制车辆的过度转向趋势;右后轮产生的内向横摆力矩最大,能有效地控制不足转向[7]。本文根据控制器产生的校正横摆力矩符号,即当校正横摆力矩为负时,对左前轮施加制动力,反之对右后轮施加制动力。通过对左、右制动力调节,达到对车辆稳定性进行控制的目的。
3.5 模糊控制器设计
模糊控制器的输入变量为横摆角速度误差Δω(Δω=ω-ωd)和质心侧偏角误差Δβ(Δβ=ββd),其基本论域分别为 [-0.26,+0.26]rad/s和[-0.87,+0.87]rad。模糊控制器输出变量为校正横摆力矩Tz。
输入和输出语言变量的模糊子集均为{NB,NM,NS,ZE,PS,PM,PB),其中NB、NM、NS分别表示负大、负中和负小;ZE表示零,PB、PM、PS分别表示正大、正中和正小。量化论域[-6,+6],隶属度函数均采用gaussmf隶属函数,如图5所示。
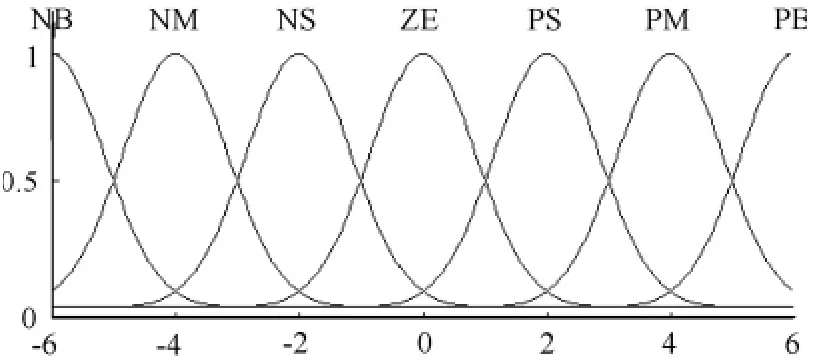
图5 输入和输出变量隶属度函数
当Δω较大时,则应该输出一个较大的负横摆力矩,在左前轮上施加制动力;反之,则应该输出一个较大的正横摆力矩,在右后轮上作用制动力。同时考虑对质心侧偏角的影响,通过仿真不断地进行调整控制规则,得到如表1所示的模糊控制器的控制规则。
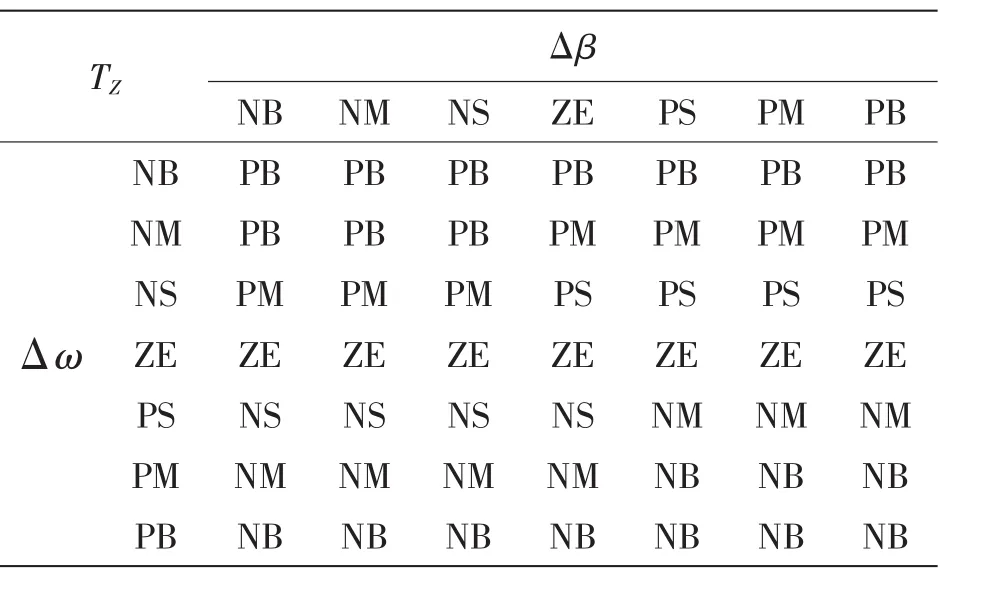
表1 模糊控制规则表
4 ADAMS与Matlab联合仿真控制
工况1:汽车车速为90km/h,前轮正弦输入幅值为4°,在附着系数为0.6路面作单移线运动。图6所示为有VDC和无VDC控制的仿真结果。
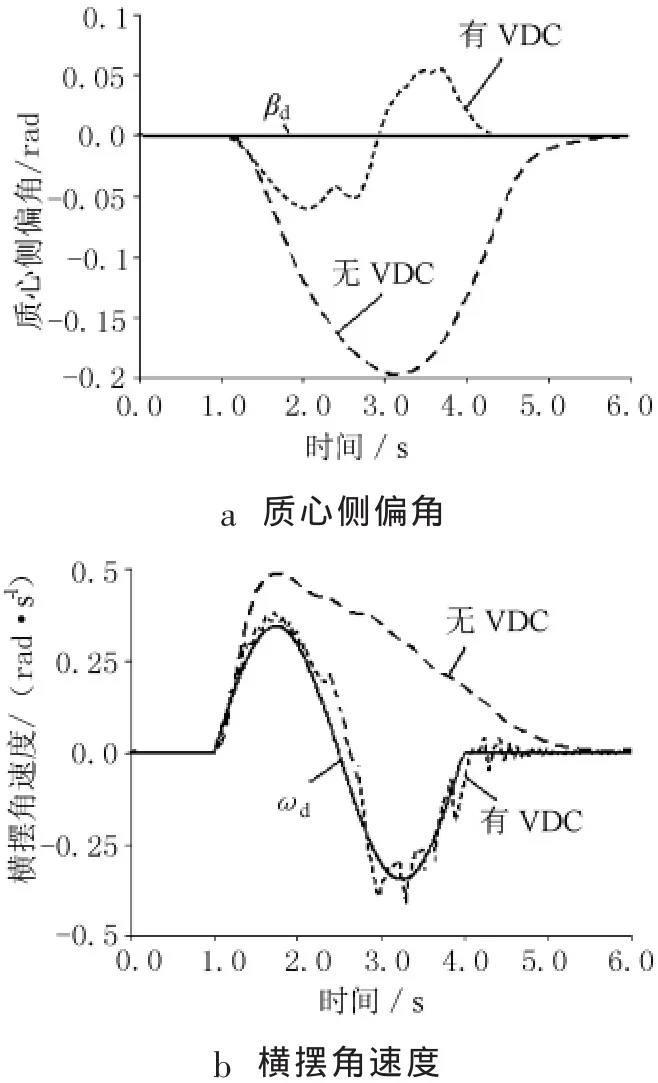
图6 正弦转向输入时有、无VDC的对比曲线
由图6可见,有VDC的汽车响应要好于无VDC的汽车,施加差动制动控制后,使汽车横摆角速度能很好地跟踪期望横摆角速度ωd;质心侧偏角β也得到较好的抑制。
工况2:在附着系数为0.8路面上,汽车车速等于90km/h,转向盘为J-转向输入 (前轮转角为4°)。如图7所示为该工况下有VDC和无VDC控制的仿真结果。
由图7可见,有VDC汽车的响应能较好地跟踪期望横摆角速度ωd和期望质心侧偏角βd,车辆在整个过程中处于稳定状态。
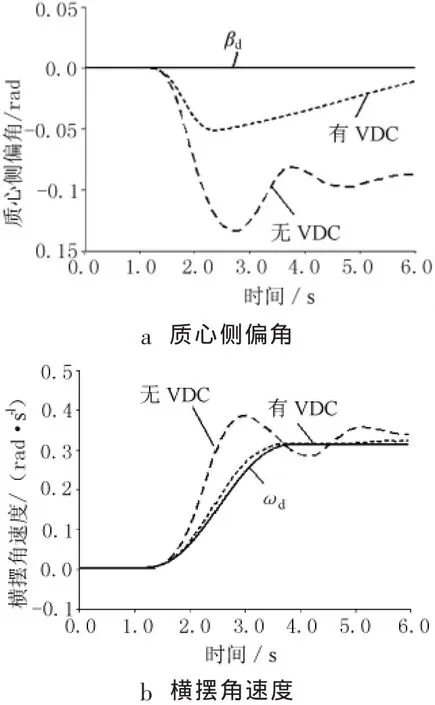
图7 J-转向输入时有、无VDC的对比曲线
5 结论
利用整车多体系统动力学模型进行汽车操纵稳定仿真试验,结果表明,整车横摆角速度和质心侧偏角的急剧变化是引起汽车丧失方向稳定性的主要原因。以横摆角速度误差和质心侧偏角误差为输入量,校正横摆力矩为输出量,建立稳定性控制系统的模糊控制策略,并将建立的VDC模糊控制系统模型与ADAMS整车模型实现联合仿真控制。仿真结果表明,VDC系统通过提供适当的横摆力偶矩,使车辆稳定性与路径跟踪性能均得到改善,同时说明建立的整车模型、控制算法正确、有效。
[1]Niasar A H,Moghbeli H,Kazemi R.Yaw moment control via emotionaladaptive neuro-fuzzy controllerfor independent rear wheel drives of an electric vehicle[C]// IEEE Conference on Control Applications CCA 2003.Istanbul.Turkey:IEEE,2003:380-385.Zhou Q,Wang F.Driver assisted fuzzy control of yaw dynamics for 4WD vehicles [C]//IEEE Intelligent Vehicles Symposium.Parma,Italy:IEEE,2004:425-430.
[2]周红妮.车辆操纵稳定性控制控制方法与策略的比较研究[D].武汉:武汉科技大学,2007.
[3]皮大伟,陈南,王金湘.模糊逻辑在车辆稳定性控制系统中的应用[J].东南大学学报,2008(1):43-48.
[4]H.E.Tseng,D.Madau,B.Ashrafi,T.Brown,D.Reckei.Technical Challenges in the Development of Vehicle Stability Control System [C]//Proceedings of the 1999 DEE International Conference on Chantml Applications Kohala Coast-Island of Hawai'i,Hawai'i,USA August 22-21,1999.
[5]余志生.汽车理论[M].北京:机械工业出版社,2007.
[6]高斯.车辆动力学稳定系统仿真及优化[D].武汉:华中科技大学,2006.
[7]李彬,喻凡.车辆横摆稳定性的模糊控制[J].上海交通大学学报,2008,42(6):900-904.
[8]冯樱,郭一鸣,郑冬黎,陆通.基于ADAMS的整车建模和操纵稳定性仿真评价[J].湖北汽车工业学院学报,2009(3):11-14,19.
[9]冯樱,王保华,周红妮,基于联合仿真的汽车转弯制动ABS模糊控制研究[J].湖北汽车工业学院学报,2010(2):16-20.
Analysis and Control Research for Vehicle Handing Stability Based on Co-simulation
Feng Ying,Wang Baohua
(Dept.of Automotive Engineering,Hubei Automotive Industries Institute,Shiyan 442002,China)
The research of vehicle dynamic control(VDC)system based on multi-body system dynamics and fuzzy control theory was presented.A multi-body dynamics vehicle model was built by ADAMS/CAR,the change of vehicle kinematic parameters was researched under different conditions.A fuzzy controller was designed for the VDC system under Matlab environment.The contro1 system was combined with the vehicle dynamic model by data exchange interfaces between two kinds of software,the responses of vehicle with VDC system under various operating conditions were simulated.The result shows the VDC with the differential braking fuzzy control can improve vehicle handling stability.
stability control;co-simulation;fuzzy control;differential braking
U461.6
A
1008-5483(2011)02-0004-05
2011-03-07
冯樱(1968-),女,湖南醴陵人,副教授,主要从事汽车仿真与控制方面的研究。
