船舶距航道边界距离自动测定方法研究
2011-02-27肖进丽刘明俊
肖进丽 刘明俊
(武汉理工大学航运学院 武汉 430063)
内河航道通过航标配布来合理地设置岸标和浮标以确定航道两侧边界、揭示航道信息,从而保证船舶安全、经济地航行.根据《内河助航标志》,通常以航标标位联线或距其最小安全航行距离处作为航道边界[1].尽管在不同的航道条件下,航标配布和航道维护技术规定不尽相同,但是既要保证船舶能在航标标示的航道水域内安全行驶,同时还要遵守《内河避碰规则》的规定,在保证安全的前提下尽量航行在规定的航路上,以合理利用航道、避免引发水上交通事故,就需要船舶具备能够准确判断本船距航道边界距离的能力.目前,船舶距航道边界的距离判定通常由船舶驾引人员采用肉眼目估的方法或利用雷达估测,这些常用方法不仅精度不高,而且易受气象条件、人眼视距、雷达设备局限等因素的影响而造成判断失误、引发交通事故.近年来,内河、特别是长江航运业务日渐增长,如果船舶具备自动、实时测量距航道边界距离的能力,不仅可以使船舶合理选择航路、减少水上交通事故的发生,还可提高航道利用和管理效能.本文在推导出船舶距航道边界距离计算公式的基础上,针对内河航道特点和船舶航行特征,提出了基于电子江图和基于智能航标的2种船舶距航道边界距离自动测定方法,通过分析比较,得出基于电子江图的船舶距航道边界距离自动测定方法更为可行和有效的结论.
1 船舶距航道边界距离计算公式
如图1所示的一段航道,假设其一侧航道边界由相邻两侧面标1和2的联线界定,船舶距航道边界距离为d,并且在同一地理坐标系下,船舶、标1、标2的位置坐标分别为其相互之间的距离分别为L1,L2, L3,则根据面积计算的常用公式及海伦公式就可计算船舶距图中所示航道边界的距离d为


从以上所给出的船舶距航道边界距离计算公式可看出,如果船舶要对其距航道边界距离进行自动测定,只需自动、实时获得船舶及标示航道边界的侧面标的位置坐标即可.
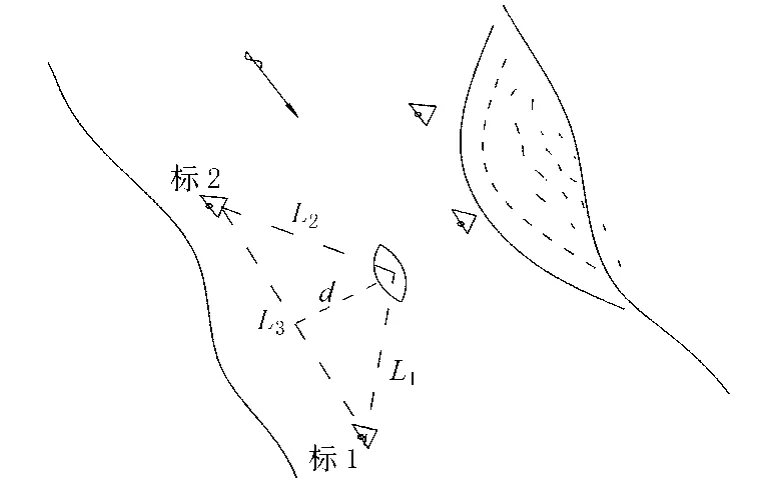
图1 船舶距航道边界距离示意图
2 船舶距航道边界距离的自动测定方法
船舶在航道中行进时,自身的位置可通过携载的GPS卫星导航定位仪获得[2],若同时能通过某些方法或手段自动获得邻近水域航标的位置信息,就能按上述船舶距航道边界距离计算公式通过软件程序自动计算出船舶距航道边界距离d.据此,船舶距航道边界距离的自动测定问题即演化为船舶对所行驶航道的航标位置的自动获取问题.
船舶距航道边界距离的自动测定方法,依据航标自身的性质,具体可分2种情况进行讨论.
2.1 基于电子江图的船舶距航道边界距离的自动测定
如果标示航道边界的为普通航标,那么可通过在航标上安装雷达应答器,使用船用雷达即能获取船舶邻近水域航标的位置信息.但是,船舶通过雷达来触发雷达应答器获得航标的位置,其触发响应有一个时间延迟,这个延迟所产生的距离误差(等效于一个小于100 m的距离)对于内河航道上的航标位置定位来说是不能忽略的,因此在实际中行不通.另外,也可采用在船上装载光电经纬仪或智能跟踪全站仪等测量仪器测定航标位置,但由于受到仪器目前测量范围和价格的限制,在船舶上安装使用实际也不可行.
当前,电子江图作为数字航道的核心和智能航运的基础,正在广泛研发,船舶通过电子江图就能自动、准确地得到所航水域附近的航标位置信息.因此,若将船舶距航道边界距离计算软件集成在电子江图里形成一整套系统,仅基于普通航标,船舶在行驶途中不仅可以自动、实时获取其距航道边界的距离d,而且还能根据电子江图进行提示和报警,及时对船舶的航迹进行调整,合理选择船舶航路.图2即为基于电子江图的船舶距航道边界距离的自动测定原理框图.

图2 基于电子江图的船舶距航道边界距离的自动测定原理框图
2.2 基于智能航标的船舶距航道边界距离的自动测定
如果标示航道边界的航标是智能航标,那么就可将船舶纳入智能航标的遥控遥测系统的客户端.如图3所示,智能航标的遥控遥测系统通过安装在航标上的GPS定位装置获得航标的位置信息,并通过GSM网络将航标位置数据及监控终端采集的航标其他工作参数实时传输给航标遥测遥控系统监控中心,监控中心负责将航标的工作参数及位置信息传送给客户端使用[3].船舶作为智能航标遥控遥测系统一个客户端,一方面向监控中心服务器请求所航水域附近航标的位置信息和工作参数,另一方面通过集成在船舶客户端软件中的船舶距航道边界距离计算程序计算出船舶距航道边界距离d.
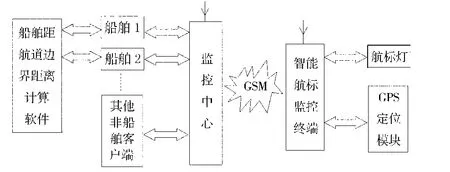
图3 基于智能航标的船舶距航道边界距离的自动测定原理框图
3 分析比较
对于以上所提的2种船舶距航道边界距离的自动测定方法,要评定其性能的优劣,首先应根据其测定结果的精度进行评析.
根据误差传递函数[4]

(y=f(x1,x2,…,xn)为函数形式),从式(1)可见,对于基于电子海图的船舶距航道边界距离自动测定方法,其精度主要与船舶所携载的GPS导航仪的定位精度、电子江图自身的数据精度有关;另外,若考虑到船舶GPS定位数据与电子江图上航标位置数据在获得时间上的不同步,这个影响船舶距航道边界距离测定结果精度的因素也要考虑.对于基于智能航标的船舶距航道边界距离自动测定方法,其精度则主要由船上的GPS导航仪的定位精度及智能航标上安装的GPS模块的定位精度决定,当然也要考虑到船舶获得自身定位数据与航标定位数据的时间不同步误差.由此可见,航标位置信息获得的精度是影响两种船舶距航道边界距离自动测定方法性能优劣评定的因素.目前,在内河航道沿岸地区,为GPS提供基准数据的连续运行参考站系统(CORS)并未大范围建立,因此安装在智能航标上的GPS定位模块由于采用的是单点定位方式,其精度并不高(在几米~十几米之间).对于普通航标,如果不考虑风流的影响,由于其定位通常采用经纬仪前方交会法的测量方法,其定位精度相对较高,一般为1~2 m.因此,在目前,基于电子江图对船舶距航道边界进行距离测定的精度要高于基于智能航标对船舶距航道边界进行距离测定的精度.
4 结束语
基于以上的分析比较,尽管基于电子江图的船舶距航道边界距离自动测定方法和基于智能航标的船舶距航道边界距离自动测定方法都能解决内河航道上船舶距航道边界距离的自动测定问题、从而更为有效地保证船舶水上交通安全,但是在当前CORS系统于内河航道未大范围建立的情形下,考虑到测量精度、投资成本等因素,则基于电子江图的船舶距航道边界距离自动测定方法较基于智能航标的船舶距航道边界距离自动测定方法显然更为可行和有效.但是,由于目前电子江图在国内尚无统一的技术标准而影响其跨区域使用[5],所以希望一种统一、规范和标准的电子江图能早日面世.
[1]周俊安.内河助航标志[M].北京:人民交通出版社, 1996.
[2]孙 涛.内河船舶GPS监控系统架构[J].中国水运,2009(9):35-36.
[3]潘 州,杨晋生,张丽萍.智能航标的设计与实现[J].电子测量技术,2006,29(2):72-73.
[4]王铁生,袁天奇.测绘学基础[M].河南:黄河水利出版社,2008.
[5]陈 伟,齐传新.电子海图技术在内河电子江图制作中的应用[J].航海技术,2002(1):25-26.
