基于网格Agent的群体性事件人群聚集模型研究
2011-01-25党会森
常 钦, 党会森
(中国人民公安大学安全防范系,北京 100038)
0 引言
目前我国群体性事件呈阶段性多发态势,对人民正常的生产、生活造成了很大的影响。研究群体性事件,制定相应对策,减少其危害,已经成为一个热门课题。现在对群体性事件的研究集中在两个方面:一是社会冲突理论方面,其大多从法律界定、处置预案、策略等角度研究群体性事件的具体对策;二是群体性事件的发生机理方面,运用计算机仿真在理论上研究群体性事件的发生和发展规律。二者相互结合,构成了群体性事件研究的理论体系。
在研究群体性事件的发生机理方面,具有代表性的是基于元胞自动机和Agent的建模方法。元胞自动机是一种把时间、空间离散化,取有限的离散状态,遵循构建的局部规则,同步更新元胞空间里的元胞状态以达到模拟人群行为的目的;而基于Agent的模型是一种“自下而上”,先从个体Agent的微观行为和局部规则入手,进而以涌现的方式生成复杂的整体行为的建模方法。二者在模拟人群行为方面,既有优势又存在一些不足,后面将做出详细的分析。结合二者的优点,本文提出了一种基于网格的Agent模型,对群体性事件的人群聚集行为进行研究。
1 元胞自动机与Agent
1.1 元胞自动机
元胞自动机是由空间上各向同性的一系列元胞组成。具体地说,构成元胞自动机的部件被称为“元胞”,每个元胞具有一个状态,它们各自的状态根据一个局部规则随时间变化。元胞空间内的元胞依照这样的局部规则进行同步的状态更新,整个元胞空间则表现为离散时间维上的变化[1]。
元胞自动机已经在交通流模型中得到了很好的应用,但在人流模型中,元胞自动机还存在一些不足:一是元胞自动机模型中的元胞个体通常是不可以移动的,元胞在整体上的运动是通过元胞个体的状态变化来实现的,并不能很好的描述人群的真实行为;二是元胞自动机每个元胞的更新规则相同,不能体现人群个体之间的差异性;三是元胞自动机只考虑有限邻居的状态来决定自己状态的改变,在模拟人群方面有一定的局限性。
1.2 Agent技术
作为人工智能领域发展起来的新型Agent模型,能够连续不断地感知外界以及自身状态的变化,自主产生相应的动作。它具有自主性、主动性、持续性、交互性的特点,通过自身不断感知→决策→行动形成个体的行为,不同个体交互、行动便涌现出了群体行为[2]17-19。基于 Agent的建模方法本着“自下而上”的思想,在小规模人群仿真中发挥了很好的作用,但基于Agent的模型缺乏时序逻辑性,在大规模的人群仿真中有些不适宜[3]。
2 基于网格的Agent模型
基于网格的Agent模型是在元胞自动机和A-gent模型的基础之上,针对其不足而提出的一种建模模型。它主要有以下特点:
(1)在基于网格空间的智能体模型中,网格只是作为智能体的空间定位。
(2)基于网格空间的智能体模型是基于全场景的宏观层面上的决策和基于领域的微观层面决策的集合。
(3)模型中的个体是单独决策,有利于解决一些复杂的、非线性问题。
(4)基于网格空间的智能体模型使个体行动更加精确,更具有时序逻辑性。
3 基于网格Agent的群体性事件人群聚集模型
3.1 网格的设定
根据《中国成年人人体尺寸标准 GB1000—88》,18~60岁成年男子的最大肩宽的95%分数位为46.9 cm,胸厚的95%分位数为24.5 cm,18~55岁的成年女子最大肩宽的95%分位数为43.8 cm,身体厚度的95%分位数为23.9 cm[4]。为了精确地描述人群行为规律,本文将人员个体占用的平面空间设为50 cm×30 cm,每一个Agent个体处于一个网格平面空间内。
3.2 人群聚集个体模型的建立
根据Agent通过自身不断感知→决策→行动形成个体行为的特点,把人群聚集的个体模型分为探测行为、决策行为和行动3部分。
3.2.1 探测行为
智能体的探测能力是有限的,在周期内,它只能对有限空间范围进行探测。这种探测,是以个体A-gent当前位置为中心,以它的扫描步长为半径的圆形区域,探测到的外界及其他智能体的信息存储在一个二维数组内,该二维数组显示了探测范围内的每个坐标是否存在智能体或障碍物,如果存在,记录其坐标及其他相关信息,否则,将该坐标标记为空。
3.2.2 决策行为
根据探测到的信息,依据一定的规则,智能体对下一步的行动进行决策,这其中包括:
(1)目标决策。智能体P(x,y)通过探测范围内其他智能体的坐标,计算出智能体平均中心坐标作为自己的目标。这个目标将对智能体产生目标吸引力Fx,y,智能体计算周围每个网格的目标吸引力,作为自己决策下一步行动的依据之一,如图1所示。
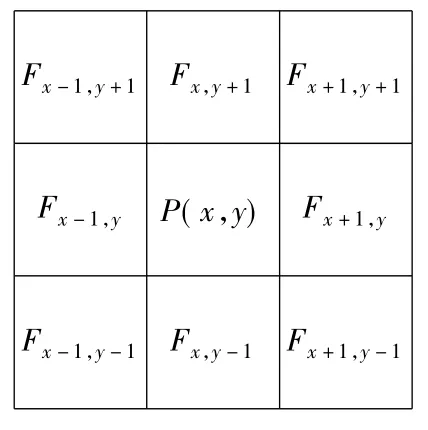
图1 目标吸引力权重表
其中,

图1只是一个行动步长的吸引力权重表,根据式(1)还可以计算出两个甚至是更多步长的吸引力权重表,为智能体提供目标决策的依据。
(2)速度决策。智能体的速度取决于目标的吸引度以及周围人群的密度:

式(2)中,λ 为比例常数;η∈[0,1],表示保持原来速度的惯性;U是采用前期网络模型研究的速度与密度的经验公式[5]:
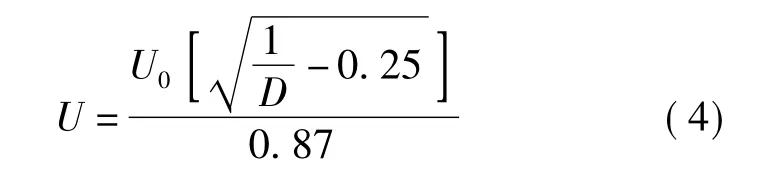
式(4)中,U0为个人自由移动速度;D为研究对象所处位置在一定范围内的人员密度。
在基于网格Agent的模型中,我们把速度量化为网格步长,即Vt+1大于阈值τ时,定义智能体的速度为两单元网格/周期,当Vt+1小于阈值τ时,智能体的速度为一单元网格/周期。
(3)避障决策。当智能体周围网格的备选目标存在障碍或其他智能体时,该网格被标记为Dx,y=0,表示该网格不可到达,当备选目标不存在障碍或者其它智能体时,记为Dx,y=1,表示该网格可到达。当智能体探测到目标网格周边有其他智能体存在时,则比较自身备选目标和对方备选目标,如有重合目标网格存在,则比较重合网格的权重[2]34,权重大的智能体把该网格标记为Dx,y=1,权重小的把该网格标记为 Dx,y=0。
智能体在选择目标改变自身状态的时候,还有一种保持与前一段时间的行走路线同一方向的趋势,我们把它定义为惯性。为了描述个体行走的惯性趋势,我们又定义了备选目标的惯性权重。智能体记录自身由上一个位置运动到当前位置的方向,把它作为自己下一步运动的惯性方向,计算备选目标的惯性权重。3个方向(其他方向可由对称性得出)的惯性权重Ax,y如图2所示。

图2 三种方向的惯性权重表
智能体在作出上述决策判断后,要计算出每个备选目标网格的一个总权重Ux,y

式(5)中,Ux,y为备选目标的总权重,a、b为调整参数。
3.2.3 行动
在作出上述决策后,智能体就要根据决策结果向下一个目标运动了。首先是确定步长,然后计算确定步长范围内每个备选目标网格的总权重,选择权重最大的一个网格作为t+1时刻的目标网格并向其移动。其执行过程如图3所示。

图3 智能体行动步骤
4 基于网格Agent人群聚集仿真
针对前面讨论的模型,以群体性事件人群聚集为例,运用该模型对事件进行仿真研究。
首先进行活动区域初始化,设活动区域为一个200 m×150 m的矩形。然后将进行3个仿真实验,分别设定初始人数为50、100、150,得到仿真结果如图4~图6。

图4 初始人数为50的仿真结果图

图5 初始人数为100的仿真结果图

图6 初始人数为150的仿真结果图
在每个仿真结果图中,第一幅图为仿真的起始阶段,区域内随机分布了相应数量的初始人员;第二幅图为人群规模初步形成时的时间效果图;第三幅图为人群规模达到最大时的时间效果图。通过分析,我们可以得到一些结论,如表1所示。
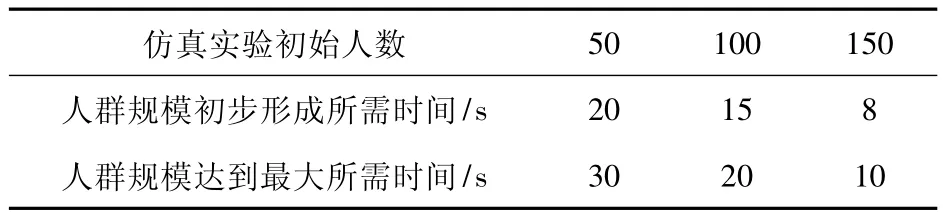
表1 人群聚集仿真实验结果表
从表1中我们可以看到,在群体性事件的初始阶段,参加群体性事件的人数越多,规模增加的越快,人群达到最大规模所需的时间也就越短。例如,当初始人数为50时,人群聚集规模达到最大是在第30秒,当初始人数为100时,人群聚集规模达到最大是在第20秒时,当初始人数为150时,人群规模达到最大是在第10秒。这也与现实的群体性事件规律相吻合。例如,在瓮安事件中一开始只有十多人进行游行,当队伍达到200人时,聚集规模迅速加大加快,以至于达到了上千人的规模冲击政府[6]。这说明,在处置群体性事件的时候,一定要在早期采取适当的措施进行干预,避免事件“发酵”,带来更大的损害。
5 结论
在研究元胞自动机与Agent模型的基础上,本文建立了一个基于网格Agent的群体性事件人群聚集模型。Agent通过判断周围网格的目标权重、惯性权重以及有无障碍来选择自身最佳移动目标,实现自身运动,达到模拟人群聚集的效果。在此基础上,本文又运用模型对群体性事件人群聚集进行了仿真实验,观察到了有关人群聚集的规律。
尽管我们认为基于网格的Agent模型很好的表现了群体性事件人群聚集的个体特性,但人群仿真终究是一个复杂的过程,其间有许多因素还远不是现有模型可以完全包括的,因此,还需要进一步的探索研究。
[1] 刘真余,芮小平,董承玮,等.元胞自动机地铁人员疏散模型仿真[J].计算机应用工程,2009,45(27):203-205.
[2] 常宁宁.基于多智能体的群体性事件仿真研究[D].长沙:国防科技大学计算机系,2008.
[3] 李峰,刘晓强.基于Agent和元胞的火灾逃生仿真模型应用研究[J].系统仿真学报,2008,20(15):4163 -4267.
[4] 沙云飞.人群疏散的微观仿真模型研究[D].北京:清华大学土木工程系,2008.
[5] 黄希发.大型场馆内突发事件情况下人员应急疏散仿真研究[D].哈尔滨:哈尔滨工程大学自动化学院,2005.
[6] Bu Fangliang,Chang Qin.Dynamic model of the mass event based on agenttechnology[C]. Proceedings 2010IEEE International Conference on Emergency Management and Management Sciences,2010:484-487.
