CE-1立体相机影像与激光高度计数据不一致性分析
2011-01-04赵双明李德仁牟伶俐
赵双明,李德仁,牟伶俐
1.武汉大学遥感信息工程学院,湖北 武汉430079;2.武汉大学 测绘遥感信息工程国家重点实验室,湖北 武汉430079;3.中国科学院国家天文台,北京100012
CE-1立体相机影像与激光高度计数据不一致性分析
赵双明1,李德仁2,牟伶俐3
1.武汉大学遥感信息工程学院,湖北 武汉430079;2.武汉大学 测绘遥感信息工程国家重点实验室,湖北 武汉430079;3.中国科学院国家天文台,北京100012
直接利用CE-1激光高度计测高数据制作月球表面模型,分辨率、精度都较低。利用激光测高数据改善三线阵CCD数据立体定位精度是一种有效方法。通过计算立体影像外定向参数、激光脚印(footprint)月固坐标,基于物方空间到像方空间的快速反投影算法,分析研究立体影像与激光高度计数据不一致性,目的是为后续CE-1探月三线阵影像数据与激光测高数据联合平差处理提供相对基准控制。通过不一致性分析试验,得到一些有益的结论,这些分析结果有望在下一步联合平差处理中获得应用。
CE-1三线阵立体相机;激光高度计;数据不一致性;反投影;平差控制约束
1 引 言
CCD三线阵立体相机(TLS)、激光高度计(LAM)是“嫦娥一号(CE-1)”卫星获取月球形貌信息的两个主要载荷。“嫦娥一号”设计轨道高度为200km圆形轨道[1],立体相机前视、后视相对中视影像立体交会角φ0=±16.7°,绕月飞行中,立体相机同时获取120m分辨率的前视、正视和后视三个影像条带数据[2];激光高度计沿卫星轨道方向,向卫星下视方向发射激光脉冲,形成线性的激光点剖面,月面光斑点距离约1.4km[3]。绕月期间,“嫦娥一号”共获取包括月球极区在内2 500轨影像以及300多万个有效月面激光点数据。
利用CE-1数据,中国科学院国家天文台制作的全月球影像图,平面相对定位精度优于240m,平面绝对定位精度(与NASA月球影像图的统计比较)约为100m~1.5km[4];中科院上海天文台制作的月球地形模型CLTM-s01,径向高程测量精度约为31m,沿赤道区域空间分辨率约为0.25°(7~8km)[3]。由于卫星定轨、定姿、立体相机以及激光高度计测量误差的存在,直接定位精度较低,与“嫦娥一号”120m分辨率的立体相机影像相比,月球表面模型分辨率还十分粗糙。在缺少月面控制的条件下,对立体相机和激光高度计数据进行联合平差处理是提高定位精度的有效方法。本文通过研究立体相机外定向参数提取、激光脚印月固坐标计算、激光脚印与影像之间反投影等问题,分析立体相机影像数据与激光高度计数据的不一致性,分析结果将用于下一步联合平差处理。
2 影像外定向参数确定
CE-1卫星定轨由统一S波段(USB)测距测速和甚长基线干涉(VLBI)测量基于J2000惯性系联合确定[5];卫星姿态采用星敏感器在轨姿态测量控制。根据卫星辅助数据提取影像外定向参数时,首先要统一时间基准[6],本文将时间刻度统一转换为J2000儒略日秒(称为历元);其次,经过坐标变换处理,将探月卫星的轨道位置、姿态转换到月固坐标参考框架。本文月固坐标系采用IAU/IAG的定义,即参考椭球体为正球体,球形半径为1 737 400.0m,本初子午线定在月球正面的视中心(中央湾),经纬度、方向等定义采用与地球坐标系相似的方法[7]。
根据卫星辅助数据,计算立体相机历元t在月固坐标系中的位置,作为立体相机外方位线元素。设t为J2000参考框架标准历元(单位:s)。为探月卫星在J2000坐标系中的位置矢量为月球质心在J2000坐标系中的位置矢量;R表示J2000到月固坐标系旋转矩阵,根据IAU/IAG行星旋转元素[7]计算得到,则探月卫星在月固坐标系中的位置矢量由式(1)计算

根据卫星姿态数据以及立体相机安装矩阵,计算成像历元t立体相机在月固坐标系中的姿态,作为立体相机外方位角元素。设卫星本体坐标系相对月固坐标系旋转矩阵表示为,若已知立体相机安置矩阵,则立体相机坐标系相对月固坐标系旋转矩阵可以用式(2)计算

如果不考虑卫星定轨、定姿以及各种仪器误差,根据式(1)、式(2)计算得到影像相对月球的外定向参数后,在任意成像历元t,立体相机扫描线阵影像应满足共线条件方程式(3)

由于立体相机采用推扫式线中心投影成像,因此,式(3)中,投影中心坐标、旋转矩阵以及影像坐标是时间相关的,即特定的成像历元epoch,每条扫描线都有各自的外定向参数。
3 激光脚印月固坐标计算
图1为激光高度计测距原理[8]。立体影像外定向参数计算完成后,基于三维空间相似变换原理计算激光脚印月固坐标。

图1 激光高度计测距原理Fig.1 Principle of laser altimeter ranging
如图2,OM-XMYMZM为月固坐标系;OSXSYSZS为卫星本体坐标系;A为月面上激光脚印。设[ρXρYρZ]T表示激光脚印A在卫星本体坐标系中三个坐标分量;R(t)表示历元t本体坐标系相对月固坐标系旋转矩阵;[XS(t)YS(t)ZS(t)]T表示历元t卫星在月固坐标系中的位置矢量。

图2 激光脚印月固坐标计算原理Fig.2 Coordinates calculation of laser footprints in moon-fixed frame
激光脚印A在月固坐标系中的三维坐标[XFYFZF]T由式(4)计算

此外,以月球质心为参考球心,以月球正球面为参考基准,参照如图1激光高度计测距原理,激光脚印地形正高可由式(5)计算

4 激光脚印反投影
与机载激光密集点云不同,“嫦娥一号”激光高度计数据点为稀疏的线性剖面。反投影的目的是将离散的激光脚印剖面点投影到立体相机三视影像平面。首先计算激光脚印(星下点)三维月固坐标,根据计算得到的激光脚印月固坐标、线阵影像每行影像的外定向参数,将脚印反投影到立体相机的前视、中视及后视影像平面,确定月面激光脚印在三视影像上位置。
对于线阵影像,激光脚印向影像的几何反投影是一个迭代过程[9-10]。针对传统的反投影算法计算量大、收敛速度慢的特点,提出一种线阵影像快速反投影算法,对所有物方点计算迭代2~4次即可完成反投影变换。基本思想是首先建立双线性变换关系,快速实时确定影像搜索窗口,然后在搜索窗口内,将计算的立体相机焦平面坐标差转换为扫描行增量,快速迭代确定最佳扫描线。
搜索窗口确定原理为:设相机焦平面上每条线阵CCD像素数为N,条带影像行数为L,月球平均高程面为H0。
如图3示。在轨道条带影像上选择a(0,N)、b(0,0)、c(L,0)、d(L,N)、e(L/2,N/2)5个像点,利用月球平均高程面上对应的月面点A、B、C、D、E坐标,建立变换关系如式(6),并解算系数c0、c1、c2、c3。由于该方法是针对整个条带影像,因此,反投影时双线性变换参数c0、c1、c2、c3仅需计算一次。

图3 搜索窗口计算原理Fig.3 The principle of search window determination

当给定月面点大地坐标M(lon,lat,H)时,代入式(6),预测该月面点在影像上近似扫描行索引lm,得到影像搜索窗口line∈[lm-δ,lm+δ]。
反投影具体算法如下:
(1)根据月面点坐标按式(6)计算搜索窗口;
(2)搜索窗口内取初始扫描行序号i=lm-δ(δ由立体相机基高比确定);
(3)根据扫描行序号i,获取对应行的外定向参数,按共线条件方程计算立体相机焦平面坐标(xi,yi);
(4)计算扫描行增量Δi=(xi-x0)/ps,更新扫描行序号i=i+Δi(x0表示CCD线阵在焦平面上的横坐标,ps表示CCD像素大小);
(5)若Δi<σ(0.2~0.5像素)迭代终止,否则返回步骤(3)。
5 数据不一致性试验及分析
使用嫦娥一号第268轨Level1级试验数据进行试验。轨道前视、中视和后视影像覆盖月面范围在-70°S~+70°N之间,影像分辨率120m,激光高度计月面光斑距离1.4km。
5.1 计算立体相机外定向参数
根据卫星辅助数据计算的相机外定向参数如表1所示。

表1 影像外定向参数Tab.1 Exterior orientation parameters of CE-1image(sample)
上述计算,影像初始外定向参数的精度主要由卫星辅助数据(轨道、姿态)精度决定。
5.2 计算激光脚印月固坐标
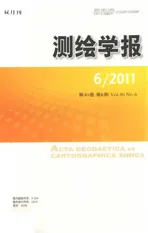
剔除无效数据后,计算的激光脚印月固坐标如表2所示;激光剖面点如图4所示。图4中,横坐标轴表示轨道中视线阵影像行序号,纵坐标轴表示激光脚印点地形正高。
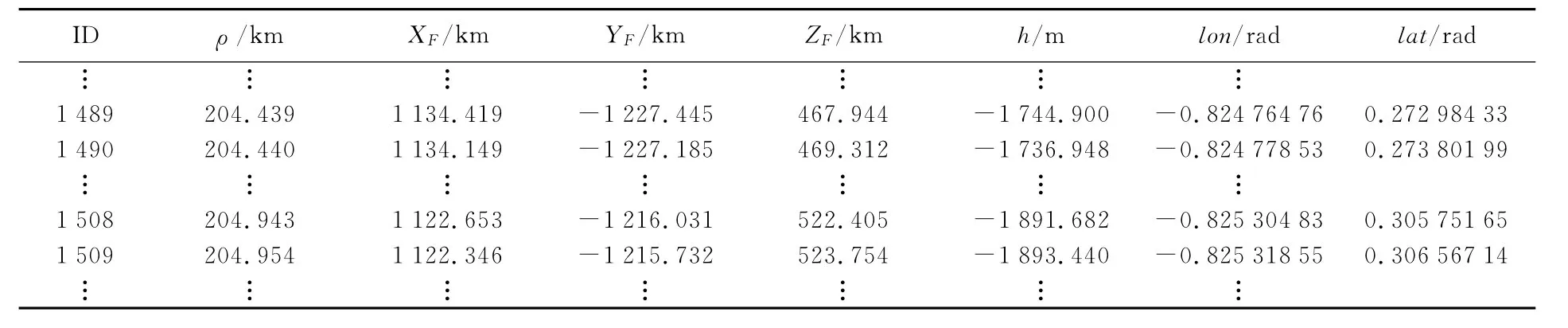
表2 激光脚印月固坐标Tab.2 Coordinates of laser footprints in moon-fixed reference frame

图4 激光脚印线性剖面Fig.4 Linear profile of laser footprints in nadir image space
需要指出,由于卫星轨道和姿态存在误差,直接采用初始定向参数计算的激光脚印月固坐标存在误差,即计算的激光脚印在月球表面上的点位与真实的点位有差异。
5.3 激光脚印向三视影像反投影
根据上述计算的影像外定向参数、激光脚印月固坐标,利用本文反投影算法,将激光剖面点分别反投影到立体相机前视、中视及后视影像上。结果如图5所示。

图5 激光脚印反投影(0.7倍率显示、部分窗口影像)Fig.5 Laser footprints back projection(0.7zoom rate display,partial image of the windows)
5.4 CE-1影像与激光高度计数据不一致性分析
由图5可以看出,激光剖面在三视影像几乎呈直线排列,且平行于轨道方向,说明CE-1卫星运行轨道是十分平稳的。
影像上相邻两激光脚印点之间距离大多为12个像素,与月面光斑距离约1.4km吻合;个别激光脚印点之间距离大于12个像素,且近似为12的倍数,是由于这些激光脚印点之间存在无效激光数据,已被剔除。例如影像上1 501点与1 502之间距离约为36个像素,中间有2个无效数据。
图5中相同编号的点(同一物方激光脚印在影像上的反投影)并不对应相同的影像特征,表明影像与激光高度计数据之间存在不一致性。主要误差源包括:卫星轨道、姿态测量误差、立体相机和激光高度计本身的误差以及时间同步误差。
由于缺少绝对定位参考,本文采用如下方法分析影像与激光高度计数据之间不一致性。以中视影像为参考,将中视影像上激光脚印反投影点,分别向前视、后视进行影像匹配,在前视、后视影像上分别根据反投影点与匹配后同名点的点位差,计算前视、后视上点位中误差。对该Level1试验数据集中的2 264个有效激光脚印点进行统计,前视、后视上点位中误差分别约2个像素。这表明,同轨的立体影像数据与激光高度计数据之间存在约2个像素的误差。
6 数据不一致性应用
联合平差时,像点坐标、激光高度计测距数据是主要的平差观测值。像点坐标观测值分为平差影像连接点和激光脚印影像点两种观测值。平差连接点坐标由影像匹配获取;激光脚印影像点坐标则通过激光脚印在前视、中视及后视上的反投影得到。平差连接点坐标观测值取单位权1;激光脚印影像坐标观测值根据不一致性分析结果设置较小的权。平差未知数主要包括影像外方位元素、平差连接点物方坐标以及激光脚印物方坐标。
设激光脚印在月固坐标系中的坐标A(XF, YF,ZF)、激光高度计测量距离为ρ(t);对应激光脉冲信号发射时刻t,绕月卫星相机投影中心在月固坐标系中的坐标S(XS(t),YS(t),ZS(t)),则激光高度计约束条件方程为
距离ρ观测值定权则根据激光高度计测距的精度(±5m)设定。
由于CE-1立体相机影像异轨之间重叠度设计为40%,平差时激光脚印影像点观测值误差方程、激光高度计约束条件方程仅针对同轨影像建立;而异轨之间则通过轨道之间的影像连接点建立误差方程。此外,激光脚印月面距离约1.4km,而影像分辨率为120m,反投影后影像上相邻激光脚印点距离约12个像素(1.4km/120m)左右;立体相机前视、后视相对中视影像摄影基线约为500个像素(200km×tan16.7°/120m),因此,平差时只需根据基线长度间隔,在影像上挑选误差较小的激光脚印像点参加平差并建立相应的激光测高约束方程。
7 结 论
利用探月卫星辅助数据(轨道、姿态)及传感器成像几何原理,借助快速线阵影像反投影算法,研究CE-1激光数据与三线阵影像数据的不一致性。对试验结果进行分析得出:①CE-1三视影像上相邻激光脚印点之间点距多数约为12个像素,对应月面光斑距离约1.4km;②CE-1同轨影像和激光高度计数据不一致性误差约2个像素;③根据影像和激光高度计数据不一致性分析结果,激光测高数据能够用于同轨三视影像的平差控制约束,以期提高立体测图定位精度。
致谢:感谢国防科工委月球探测工程中心提供嫦娥一号月球探测试验数据。
[1] YANG Weilian,ZHOU Wenyan.Orbit Design for Lunar Exploration Satellite CE-1[J].Spacecraft Engineering,2007,16(6):16-24.(杨维廉,周文艳.嫦娥一号月球探测卫星轨道设计[J].航天器工程,2007,16(6):16-24.)
[2] ZHAO Baochang,YANG Jianfeng,WEN Desheng,et al.Design and On-orbit Measurement of Chang’E-1Satellite CCD Stereo Camera[J].Spacecraft Engineering,2009,18(1):30-36.(赵葆常,杨建峰,汶德胜,等.嫦娥一号卫星CCD立体相机的设计与在轨运行[J].航天器工程,2009, 18(1):30-36.)
[3] PING Jingsong,HUANG Qian,YAN Jianguo,et al.Lunar Topographic Model CLTM-s01from Chang’E-1Laser Altimeter[J].Scientia Sinica Pysica,Mechanica &Astronomica,2008,38(11):1601-1612.(平劲松,黄倩,嫣建国,等.基于嫦娥一号卫星激光测高观测的月球地形模型CLTM-s0l[J].中国科学G辑:物理学力学天文学,2008,38(11):1601-1612.)
[4] LI Chunlai,LIU Jianjun,REN xin,et al.CE-1Moon Image Data Processing and Image Mapping[J].Scientia Sinica Terrae,2010,40(3):294-306.(李春来,刘建军,任鑫,等.嫦娥一号图像数据处理与全月球影像制图[J].中国科学:地球科学,2010,40(3):294-306.)
[5] YE Peijian,SUN Zezhou,RAO Wei.Research and Development of Chang’E-1[J].Spacecraft Engineering,2007,16(6):9-15.(叶培建,孙泽洲,饶炜.嫦娥一号月球探测卫星研制综述[J].航天器工程,2007,16(6):9-15.)
[6] SHAN J,LEE D S,YOON J S.Photogrammetric Registration of MOC Imagery with MOLA Data[C]∥Proceedings of Joint International Symposium on Geospatial Theory,Processing and Applications.Ottawa:[s.n.],2002:8-12.
[7] SEIDELMANN P K.Report of the Iau/Iag Working Group on Artographic Coordinates and Rotational Elements of the Planets and Satellites:2000[J].Celestial Mechanics and Dynamical Astronomy,2002,82(1):83-111.
[8] ABSHIRE J B,SUN Xiaoli,AFZAL R S.Mars Orbiter Laser Altimeter:Receiver Model and Performance Analysis[J].Applied Optics,2000,39(15):2449-2460.
[9] ZHAO Shuangming,LI Deren.Geometric Pre-process of ADS40Image[J].Geomatics and Information Science of Wuhan University,2006,31(4):308-311.(赵双明,李德仁.ADS40影像几何预处理[J].武汉大学学报:信息科学版,2006,31(4):308-311.)
[10] WANG Mi,HU Fen,WANG Haitao.A Fast Algorithm for Back Project Calculation of Linear Array Pushbroom Imageries Based on Object-space Geometric Constraints[J].Acta Geodaetica et Cartographica Sinica,2008,37(8):384-390.(王密,胡芬,王海涛.一种基于物方几何约束的线阵推扫式影像坐标反投影计算的快速算法[J].测绘学报,2008,37(8):384-390.)
Inconsistency Analysis of CE-1 Stereo Camera Images and Laser Altimeter Data
ZHAO Shuangming1,LI Deren2,MOU Lingli3
1.School of Remote Sensing and Information Engineering,Wuhan University,Wuhan 430079,China;2.State Key Laboratory for Information Engineering in Surveying,Mapping and Remote Sensing,Wuhan University,Wuhan 430079;3.National Astronomical Observatories,Chinese Academy of Sciences,Beijing100012,China
Direct georeferencing to CE-1 laser altimetry data results in relatively low resolution and accuracy for lunar’s DSM.The use of laser altimetry data to improve three-line array CCD data positioning accuracy is an effective method.An analysis approach of stereo image and laser altimeter data inconsistency is proposed which project each CE-1 laser footprints to CE-1 CCD three scan images using their exterior orientation parameters obtained from satellite auxiliary data about time and the laser footprints moon-fixed coordinate.The inconsistency analysis is for the purposes of subsequent lunar image and laser altimeter data combined adjustment constraints.Some useful conclusions are drawn by analyzing inconsistency experiments.The results show that the CE-1 laser altimeter ranges are expected to be incorporated into the bundle adjustment as measurements to improve accuracy of CE-1 image photogrammetric reduction in the next step.
CE-1 three-line-array CCD sensor;laser altimeter;data inconsistency;back projection;adjustment control constraints
ZHAO Shuangming(1966—),male,PhD,associate professor,majors in the aerospace remote sensing imagery geometric processing,lunar and Mars mapping technology.
1001-1595(2011)06-0751-06
P237
A
国家863计划(2010AA122202);国家自然科学基金(41101438)
宋启凡)
2011-07-01
2011-09-08
赵双明(1966—),男,博士,副教授,研究方向为航空航天遥感影像几何处理、月球火星测绘。
E-mail:smzhao2000@126.com