数字天顶摄像仪中CCD星像亚像素定位的改进二维矩方法
2011-01-04郭金运宋来勇卢秀山阳凡林
郭金运,宋来勇,刘 新,卢秀山,阳凡林
1.山东科技大学测绘学院,山东 青岛266510;2.海岛(礁)测绘技术国家测绘地理信息局重点实验室,山东 青岛266510;3.中国科学院国家天文台,北京100012
数字天顶摄像仪中CCD星像亚像素定位的改进二维矩方法
郭金运1,2,3,宋来勇1,2,刘 新1,2,卢秀山1,2,阳凡林1,2
1.山东科技大学测绘学院,山东 青岛266510;2.海岛(礁)测绘技术国家测绘地理信息局重点实验室,山东 青岛266510;3.中国科学院国家天文台,北京100012
在利用数字天顶摄像仪通过天文测量确定天文垂线偏差的工作中,要求对CCD数字图像中星像中心进行亚像素定位。利用MATLAB实现对FITS格式CCD天文图像的正确读取,利用矩形模板实现不同亮度星像的自动搜索。在已有亚像素定位的修正矩方法基础上,提出利用迭代法寻求合适门限对二维修正矩方法进行改进。利用MATLAB实现对实测CCD星像数据的处理与分析,探讨门限的取值对不同星等恒星定位精度的影响,给出门限的最佳取值。通过与已有修正矩算法处理结果比较分析,在修正矩方法计算基础上改进计算区域后再用迭代法计算,暗星定位精度可达0.1~0.15像素。
CCD星像;亚像素定位;自动搜索;二维矩方法;门限
1 引 言
垂线偏差是铅垂线与参考方向之间的夹角,反映大地水准面相对于地球椭球的倾斜程度,在大地测量归算、地球重力场和大地水准面精化等方面具有重要应用[1-2]。数字天顶摄像仪集成CCD/GPS[3],利用CCD对测站天顶恒星进行照相,通过星像处理,计算铅垂线天文坐标,利用GPS获得大地坐标[4],根据天文大地测量原理,就可以测量高精度的垂线偏差。
目前将CCD数字摄影技术应用于天文测量,是当前国内外在天文定位方面的一个重要发展。利用装有CCD芯片的天顶摄影仪获得天顶天区恒星图像[5],通过对图像进行处理,自动获得恒星位置,进行快速精确亚像素定位,这在天文大地测量中具有重要的应用价值。
利用数字天顶摄像仪测量高精度垂线偏差的关键之一就是进行恒星成像的亚像素级精确定位。如果CCD星像定位精度达到0.2像素,则垂线偏差测量精度控制在0.2″内。国际上现阶段已经提出了一些数值定心算法,如Gauss拟合法[6-7]、一维矩方法[8-10]、二维矩方法[8,11-12]、中值法、寻导法等,通过对几种算法定位精度及时效性等方面比较分析,二维修正矩法、二维Gauss拟合法定位精度标准差较小,定位精度较高,较为实用[9,11-14]。但这些算法对暗星特别是相距比较近的暗星而言定位精度及稳定性仍不理想。为进一步提高暗星定位精度,本文提出一种新的修正矩算法,并与以往修正矩法作比较分析。试验表明,在以往修正矩方法计算基础上改进计算区域后再用迭代法计算,暗星定位精度有很大提高。
2 基于MATLAB的FITS格式CCD星像读取
FITS(flexible image transport system)[15-17]是国际天文学会(IAU)于1982年确定的世界各天文台之间用于数据存储、传输、交换的统一标准格式,也是天文大地测量中CCD星像的标准格式。FITS文件包含整数条逻辑纪录,每个记录以标题记录开始,一个FITS文件的逻辑记录长度为23 040bits,标题和图像数据都在一个新的逻辑记录里。FITS文件包含三个元素:主文件头、主数据单元(HDU)、扩展(extention)和特殊记录(special record),扩展是可选项,它体现了FITS的灵活性与可扩展性。在Windows操作系统上也有一些专业软件工具可以对FITS图像的文件头和数据进行查看、编辑以及格式转换,在此选用的是美国NASA开发的FV软件对FITS图像读取作比较。
利用MATLAB编程实现FITS格式的CCD星像读取,并与FV读取结果进行比较。利用MATLAB对FITS格式星像读取主要包括文件头信息和图像数据信息的读取转换,把图像数据转化为MATLAB支持的矩阵形式。利用本文程序对实际CCD星像进行处理,结果见图1。为编写本文的MATLAB程序,利用FV对同一幅FITS格式的CCD星像进行处理,如图2所示。比较图1和图2,通过对两图像中星像及各个像素的灰度值进行比较分析,两个输出图像是一致的,利用MATLAB对FITS格式CCD星像进行读取结果是正确的,FITS有效信息屏蔽损失较少,适合进行更加深入的研究分析。图像灰度数据以矩阵的形式读取,方便进行矩阵、数组、矢量、集合逻辑运算,提高星像自动搜索与定位程序计算效率[18]。
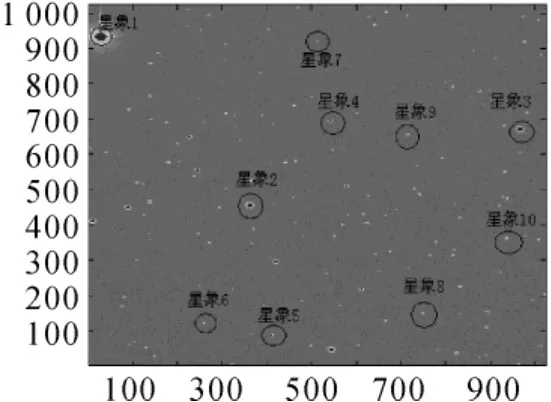
图1 基于MATLAB程序读取的CCD星像Fig.1 CCD star image read with MATLAB program

图2 基于FV读取的CCD星像Fig.2 CCD star image read with FV
3 星像自动搜索
对天体测量CCD观测而言,采用长曝光模式的星像灰度分布可以用Gauss函数表示

式中,B为背景灰度;H为Gauss函数峰值;R为Gauss函数标准差,其边缘分布为一维高斯分布,使得星像为大致圆形。据此构造矩形模板寻找各个星像亮度作用的圆形区域。
构造(2n+1)×(2n+1)矩形模板如图3,O点模板的中心像素点,A、B、C、D分别为矩形四个顶点像素点,通过设定O、A、B、C、D点灰度值大小限制及A、B、C、D间灰度值差限限制来判定矩形ABCD内是否含有符合该模板大小的星像。若判定O点含有符合该矩形的星像,则以O为圆心,OA长度为半径的圆作为该星像定位的计算区域。同时以圆心为O,半径为2r和半径为r间圆环区域作为该星像的背景灰度及背景灰度标准差计算区域。令n(n为正整数)从大到小依次递减,搜索出符合(2n+1)×(2n+1)个像素的模板的星像,实现星像从亮到暗的搜索。
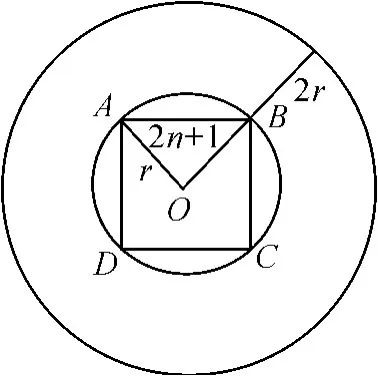
图3 (2n+1)×(2n+1)像素模板示意Fig.3 A template with(2n+1)×(2n+1)pixels
4 算法介绍
二维矩方法是处理CCD星像常用的方法,本文用迭代法求门限T值来修正二维矩方法,并与文献[8]的修正矩方法作对比。对恒星星像定位精度作比较,特别是暗星定位精度。
矩方法利用二阶矩确定星像的重心,并把星像的重心作为星像的中心,其基本公式为
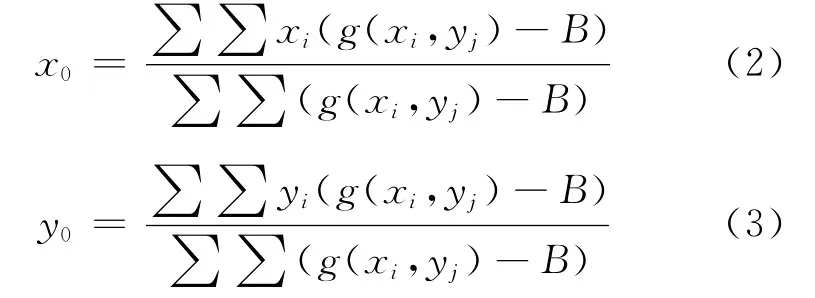
式中,g(xi,yj)为CCD影像坐标(xi,yj)处的灰度值;B为影像平均背景灰度。这种方法对背景灰度极为敏感,因为位置偏离星像中心各点在求解中是以它的距离为权进行的。
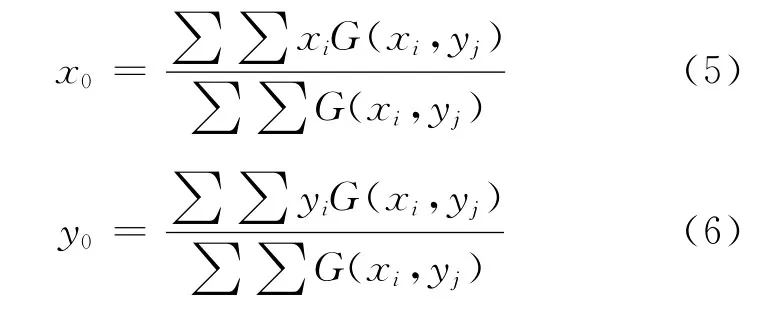
为了克服矩方法的缺点,文献[8—9]对矩方法进行修正,令

式中,T=B+mσ,σ为背景灰度标准差,m为实数(一般为3)。星像中心为
当星像很暗时,星像中心的灰度值很小,很难利用背景灰度B和背景灰度标准差σ确定合适的门限T,使用这种门限的修正方法定位效果也很不理想。
本文提出使用迭代法对门限取值进行修正,算法如下:
(1)CCD星像经过滤波噪声消除后,图像中最大、最小灰度值分别为gmax、gmin,令

(2)令
即根据门限Tk将CCD影像分为背景图像和目标图像,其中背景图像灰度值均为0,目标图像位置(xi,yj)处灰度值gk+1(xi,yj)>0。目标图像的平均灰度值为


否则,令Tk=Tk+1,转到第二步继续迭代。
(4)CCD星像中心为

5 数据处理与结果分析
利用MATLAB对改进后的二维矩方法进行编程,对FITS格式的CCD星像处理,实现星像亚像素精确定位,具体图像处理流程如图4所示。
在曝光时间不变,滤光片类型一定的情况下,星像的星等与星像灰度和的对数呈线性关系m=其中G0为零等星的灰度和,m是灰度和为G的星像的星等值[19-20]。
图5利用五幅同一天区连续观测图像的自动搜索定位结果比较不同亮度星像定位精度标准差(STD)。图5(a)、(b)中横轴为星像灰度和的对数函数,纵轴分别为X、Y方向定位精度标准差。
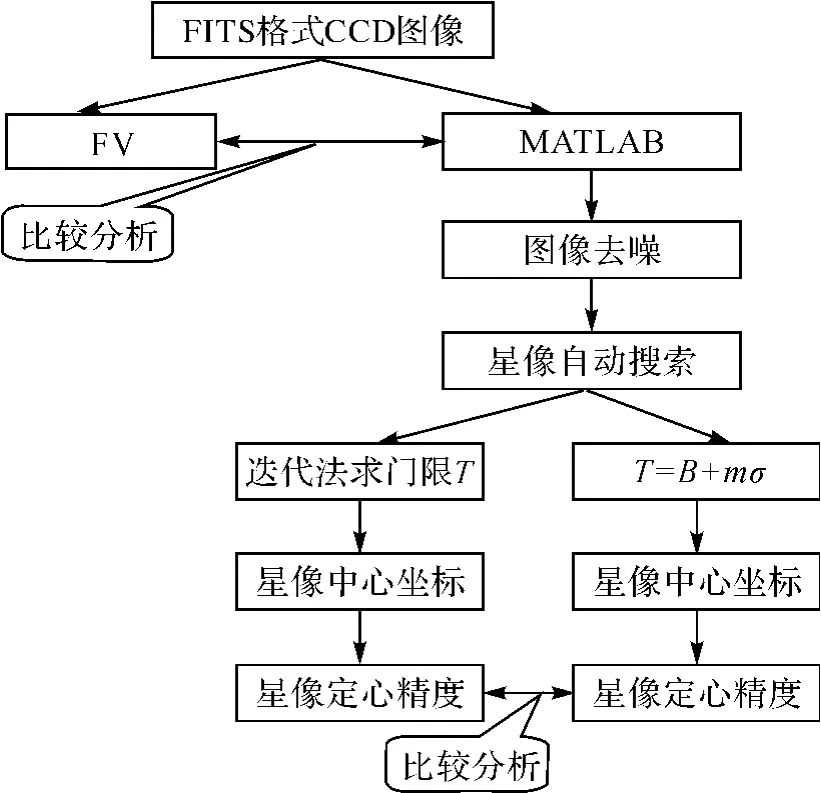
图4 CCD图像处理流程Fig.4 CCD star image processing flow
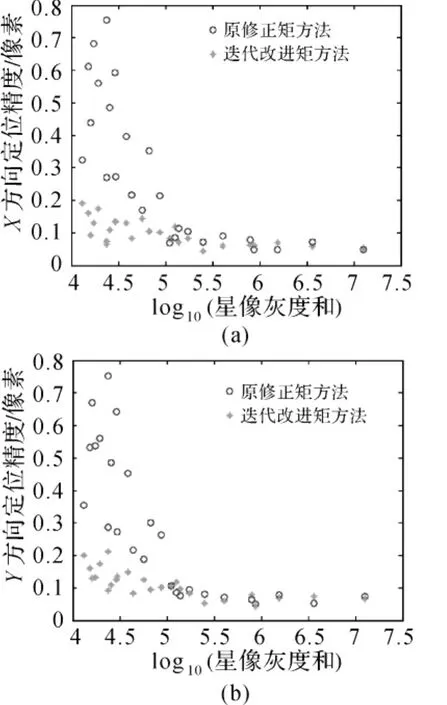
图5 定心算法改进前后定位精度比较Fig.5 Precision comparision between the improved moment method and the modified method
表1为从图像选取10颗不同亮度的星像分别利用原修正矩方法和迭代确定门限T的修正矩方法计算的定心结果。
对图1中比较亮的星像1~5而言,两方法的精度都比较高,标准差大致在0.1个像素内,计算结果可靠。但对比较暗的星像6~10,原修正矩方法计算精度很不理想,在0.5~0.9像素左右。这主要是由于对暗星而言,当n不为零时,在门限之上可供计算的像素点大大减少,一些本属于星像灰度作用区域的像素点被排斥在计算区域之外,从而影响计算精度。当n=0时,直接利用背景灰度作门限值,星像对背景灰度非常敏感,精度极不稳定。在以往修正矩方法计算基础上,对计算区域进行精化,用迭代法改进门限T,星像定位精度得到很大改善,精度标准差控制在0.1~0.15像素,对垂线偏差的测量误差影响控制在0.1″内。
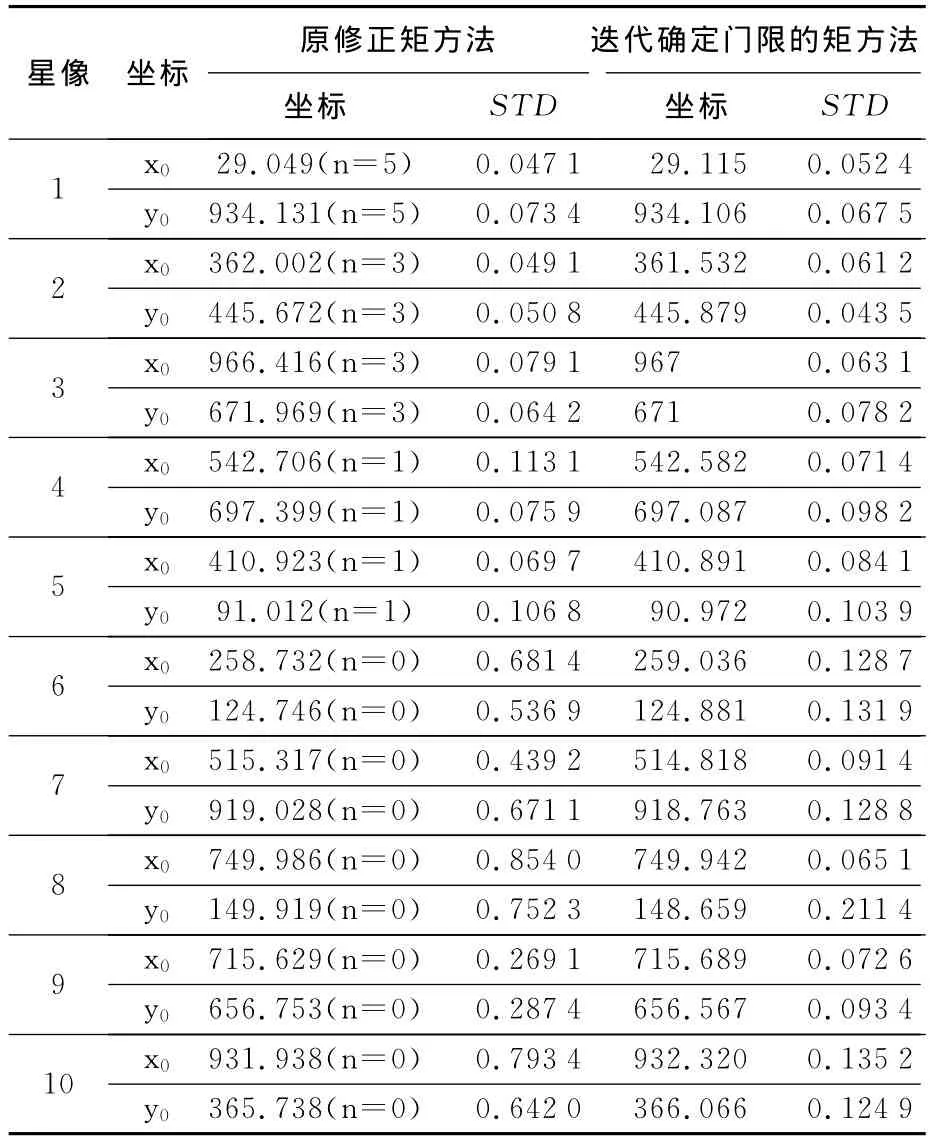
表1 CCD星像的亚像素定位结果Tab.1 Sub-pixel positioning results of CCD star image
图6给出了图1中星像6及其领域。星像6的附近有一更暗星像。当把其纳入计算范围时,其严重影响星像定位结果计算精度。在本文中通过自动搜索过程中搜索模板的条件限制,在很大程度上可以避免相邻较近的星像相互干扰,实现正确计算区域的选取,再通过门限值T的迭代改进选取,暗星定位精度得到很大提高。

图6 星像6及其邻域Fig.6 Star image 6and its adjacent area
6 结 论
选取正确的门限T是CCD精确定心的关键。试验表明,利用迭代法求门限T的方法与以往修正矩方法相比,对亮星定心精度和大致相同,精度均比较高。对暗星处理的定心精度得到很大改善,暗星亚像素定位精度能控制在0.1~0.15像素内,满足数字天顶摄影仪高精度测量垂线偏差的需要。
[1] CHEN Junyong,LI Jiancheng,NING Jinsheng,et al.On a Chinese New Quasi Geoid[J].Acta Geodaetica et Cartographica Sinica,2002,31(sup):1-6.(陈俊勇,李建成,宁津生,等.中国似大地水准面[J].测绘学报,2002,31(sup):1-6.)
[2] LI Jiancheng,NING Jinsheng,CHEN Junyong,et al.Geoid Determination in China Sea Areas[J].Acta Geodaetica et Cartographica Sinica,2003,32(2):114-119.(李建成,宁津生,陈俊勇,等.中国海域大地水准面和重力异常的确定[J].测绘学报,2003,32(2):114-119.)
[3] HIRT C.Automatic Determination of Vertical Deflections in Real-time by Combining GPS and Digital Zenith Camera for Solving the GPS-height-problem[C]∥Proceedings of 14th International Technical Meeting of the Institute of Navigation.Alexandria:[s.n.],2001:540-2551.
[4] GUO Jinyun,SUN Jialong,JU Xiaolei,et al.Solution of Ambiguity and Cycle Slip for Satellite-borne GPS Phase Data with Wide-lane/Narrow-lane Method[J].Science of Surveying and Mapping,2009,34(6):89-91.(郭金运,孙佳龙,鞠晓蕾,等.基于宽巷/窄巷法的星载GPS相位数据的模糊度解算和周跳探测[J].测绘科学,2009,34(6):89-91.)
[5] HIRT C,SEEBER G.Astrogeodätische Lotabweichungsbestimmung mit dem Digitalen Zenitkamerasystem TZK2-D[J].ZFV,2002,127:388-396.
[6] AUER L H.The Stellar Atmospheres Problem[J].Journal of Quantitative Spectroscopy and Radiative Transfer,1971,11(6):573-587.
[7] VAN ALTENA W F,AUER L H.Digital Image Centering[C]∥Image Processing Techniques in Astronomy.Dordrecht:Astrophysica and Space Science Library,1975:411-417.
[8] STONE R C.A Comparison of Digital Centering Algorithms[J].Astronomical Journal,1989,97(4):1227-1237.
[9] STONE R C.Positions for the Outer Planets and Many of Their Satellites.IV.FASTT Observations Taken in 1999-2000[J].Astronomical Journal,2000,122(5):2124-2130.
[10] JI Kaifan,SONG Qian,CAO Wenda.The One-dimention Centering Algorithms of CCD Image[J].Publications of the Yunnan Observatory,1996(4):69-74.(季凯帆,宋谦,曹文达.CCD图像的一维定心方法[J].云南天文台台刊,1996(4):69-74.)
[11] STONE R C.Positions for the Outer Planets and Many of Their Satellites.V.FASTT Observations Taken in 2000-2001[J].Astronomical Journal,2001,122(5):2723-2333.
[12] JI Kaifan,WANG Feng.Two-dimensional Modified Moment Centering Algorithm in CCD Images[J].Acta Astronomica Sinica,1996,37(1):85-90.(季凯帆,王锋.CCD图像的二维修正矩定心方法[J].天文学报,1996,37(1):85-90.)
[13] PENG Q Y.Image-processing Techniques in Precisely Measuring Positions of Saturn and Its Satellites[J].Science in China Series G:Physics,Mechanics and Astronoy,2003,46(4):362-370.
[14] LI Zhan,PENG Qingyu,HAN Guoqiang.Comparison of Digital Centering Algorithms Based on CCD Images[J].Acta Astronomica Sinica,2009,50(3):340-348.(李展,彭青玉,韩国强.CCD图像数字定心算法的比较[J].天文学报,2009,50(3):340-348.)
[15] PONZ J D,THOMPSON RW.The FITS Image Extension[J].Astronomy and Astrophysics,1994,105(Sup):53-55.
[16] COTTON J D,TODY D B.Binary Table Extension to FITS[J].Astronomy and Astrophysics,1995,113(Sup):159-166.
[17] JI Kaifan,CAO Wenda,SONG Qian.FITS BMP and SCR Image Formats and the Transformations[J].Publications of the Yunnan Observatory,1996(2):60-64.(季凯帆,曹文达,宋谦.FITS,BMP和SCR图像格式及相互转换[J].云南天文台台刊,1996(2):60-64.)
[18] WU S Y,LONG X W,YANG K Y.Accurate Calculation and MATLAB Based Fast Realization of Merit Function’s Hesse Matrix for the Design of Multilayer Optical Coating[J].Optoelectronics Letters,2009,5(5):359-363.
[19] PENG Huafeng,CHEN Jing,ZHANG Bin.Luminant Characteristic of Space Target in Space-based Opto-electronic Telescope[J].Opto-Electronic Engineering,2006,33(12):10-13.(彭华峰,陈鲸,张彬.空间目标在天基光电望远镜中的光度特征研究[J].光电工程,2006,33(12):10-13.)
[20] RORK E W,LIN S S,YAKUTIS A J.Ground-based Electro-optical Detection of Artificial Satellites in Daylight from Reflected Sunlight[R].Lexington:Air Force Research Laboratory,1982.
Improved Two-dimensional Moment Method of Positioning Sub-pixel of CCD Star Image from Digital Zenith Camera
GUO Jinyun1,2,3,SONG Laiyong1,2,LIU Xin1,2,LU Xiushan1,2,YANG Fanlin1,2
1.College of Geodesy and Geomatics,Shandong University of Science and Technology,Qingdao266510,China;2.Key Laboratory of Surveying and Mapping Technology on Island and Reef,National Administration of Surveying,Mapping and Geoinformation,Qingdao 266510,China;3.National Astronomical Observatories,Chinese Academy of Sciences,Beijing100012,China
Precise star-centroid determination of digital star image screened with CCD is important to estimate the precise astronomical location of observing station in the surveying of vertical deflection based on GPS and CCD techniques with the astro-geodetic method.The sub-pixel center of CCD star image should precisely be positioned to improve the precision of station astronomical latitude and longitude with the digital zenith camera.A program is developed with MATLAB to read CCD image in FITS format.Star images with different magnitudes can automatically be found with an adaptive rectangle template model.Based on the analysis of CCD star image,the two-dimensional moment method is improved to process real CCD star images.The threshold value selected in the moment method in common use can seriously affect the positioning precisions of star images with different brightness.So an iterative method to calculate the optimal threshold is put forward.Compared with the two-dimensional modified moment method,the improved two-dimensional moment method is of more efficiency,precision and reliability.More precise positioning results for dark stars are acquired with the improved method and the positioning precision for dark stars is up to 0.1~0.15 pixel.
CCD star image;sub-pixel positioning;automatic investigation;two-dimensional moment method;threshold
GUO Jinyun(1969—),male,PhD,professor,PhD supervisor,majors in space geodesy,astro-geodynamics and marine geodesy.
1001-1595(2011)06-0679-05
P123
A
国家自然科学基金(40974004;40974016);国际科技合作计划(2009DFB00130);国家863计划(2009AA121405);海岛(礁)测绘技术国家测绘地理信息局重点实验室基金(2009A02);山东科技大学科研创新团队支持计划
宋启凡)
2010-04-26
2011-03-03
郭金运(1969—),男,博士,教授,博士生导师,主要进行空间大地测量、天文地球动力学和海洋测绘等研究。
E-mail:jinyunguo1@126.com
