多波束与单波束测深技术在水下工程中的应用比较研究
2010-12-27王冬梅黄俊友
赵 钢,王冬梅,黄俊友,吴 杰
多波束与单波束测深技术在水下工程中的应用比较研究
赵 钢1,王冬梅1,黄俊友1,吴 杰2
(1.江苏省水利科学研究院,南京 210017;2南京市长江河道管理处,南京 210011)
多波束测深系统是目前河道测量中最先进的仪器之一,通过对多波束测深系统、单波束测深技术在典型水下工程的比测实验,分析其误差来源和精度,验证了在水下工程中多波束测深系统与常规的单波束测深技术相比具有明显的优势,从而为多波束测深系统在水下工程中的应用拓展提供科学的依据。
多波束;双频测深仪;比测;误差
多波束测深是一种具有高效率、高精度和高分辨率的海底地形测量新技术,多波束测深系统自20世纪70年代问世以来,特别是最近十几年,在高性能计算机、高分辨率显示、高精度定位和各种数字化传感器以及其他相关高新技术的介入和支撑下,多波束测深技术获得了极大的发展。与传统的单波束测深技术相比较,多波束测深系统具有测量范围大、速度快、精度高等诸多优点。它把测深技术从原先的点线状扩展到面状,并进一步发展到立体测图,从而使海底地形测量技术发展到一个较高的水平。
目前水文测量系统应用的主要测深技术是单波束测深技术,多波束测深系统在全国范围内应用的较少,本文选择GeoSwath Plus多波束条带测深系统与加拿大Knudsen双频测深系统(属于高精度单波束测深系统的一种)在典型水下工程如水下潜坝工程中的应用进行了对比分析。
1 水下地形测量系统
1.1 GeoSwath Plus多波束条带测深系统
英国GeoSwath Plus多波束条带测深系统是一种多传感器的复杂组合测量系统,主要由换能器、DSP数据处理系统、高精度的运动传感器、GPS卫星定位系统、声速剖面仪及数据处理软件构成,见图1。GeoSwath多波束由2组换能器组成,呈“V”字型,每组换能器与竖直方向交30°角。每组由4个换能器单元组成,其中一个用来发射和接收,另外3个只用来接收,单边换能器的波束开角为120°。GeoSwath多波束条带测深系统(125 kHz),其深度量程可达200 m,最大覆盖可达12倍水深,分辨率为6 mm,每次扫描的取样数在20 m水深时,可达2 500个,在100 m水深时,可达12 500个[1],精度符合国际海道测量组织(IHO)S-44精度标准。

图1 GeoSwath多波束条带测深系统配置示意图Fig.1 GeoSwath multi-beam sounding system sketch
多波束测深系统能够对水下地形进行全覆盖测量,具有同步测深点多、测量快捷、全覆盖等特点,能完成常规方法难以胜任的测量任务,尤其适用于大比例尺的测绘和特殊要求的水道地形测量等。由于多波束系统具有实时监测功能,可以现场监视水下地物地貌的细微变化,因而在堤防安全、溃口、崩岸监测、抛石护岸监测、水下工程施工监测、港口及疏浚工程监测、水下物体摸探及打捞等方面具有其它方法不可替代的作用。
1.2 Knudsen 320 M双频测深系统
Knudsen 320M双频测深系统属于高精度单波束测深技术的一种,适用于水文、勘察、航道及港口工程等行业的专业测量和水深数据记录。能与计算机和GPS定位系统等外设进行数据传输。Knudsen 320 M双频测深系统的主要指标如下:测深范围0.3~300 m;测深精度 ±1 cm(0-99.99 m),±10 cm(100~999.9 m);包括高频和低频两个换能器,分别为28~200 kHz,可以单双频交替使用。
Knudsen 320 M双频测深系统为水下地形线性测量仪器,在两条测线之间存在一定的盲区,为了使盲区的区域降低,只能采取加密测线的方法,但是这样会成倍增加工作量。
2 水下工程选取
长江重要的水下工程包括河段整治、水下抛石、水下潜坝、堤基防渗处理、大型穿堤建筑物除险加固等,其中大部分水下工程是隐蔽工程,看不见、摸不着。各项目的河势情况、水文地质条件均不尽相同,施工技术要求也不相同,施工难度大。针对各施工项目的建设特点和难点,在工程施工中选取技术先进的水下测量方法,实时高效地提供水下工程的进展情况,可以切实保证工程建设质量,大大提高工程技术水平和投资效益。
本文选取具有代表性的长江镇扬河段和畅洲左汊潜坝工程进行比较研究。和畅洲左汊潜坝工程分为塑枕护底工程和坝体工程2部分。其中塑枕护底工程从0+530至1+400,全长870 m,采用1.2 m×10 m普通塑枕和1.9 m×10 m复合塑枕,内充填江砂,要求抛护2~3层,平均抛厚2.4 m。坝体工程为和畅洲左汊口门水下的全断面塑枕潜坝,潜坝从南岸到北岸全长1 120 m,设计坝顶高程为-20 m(黄海高程,下同),坝顶宽度为10 m,上游迎水面坡比为1∶2.5,下游背水面坡比为1∶3。
长江镇扬河段为感潮河段,涨潮历时约3 h,退潮历时约9 h。退潮时流速快,最大流速可达3.0 m/s以上。汛期流量大,其中1998年汛期流量达8.5万m3/s。和畅洲左汉深泓处水深达 -60 m,水面宽1 400 m。在如此复杂的水情条件下建筑水下潜坝,其难度是可想而知的。
3 多波束与单波束测深技术的比测
为了寻求一种更精确、更全面反映水下工程施工现状和形状的手段,利用GeoSwath Plus多波束条带测深系统和Knudsen 320 M双频测深系统,在长江镇扬河段和畅洲左汊潜坝工程附近区域,进行比测。GeoSwath Plus多波束条带测深系统在测量时实时进行了姿态补偿、声速改正、吃水改正、GPS延时改正和后处理时的潮位改正;Knudsen 320 M双频测深系统一般只进行声速改正、吃水改正、潮位改正。具体比测方法如下。
(1)系统自符性比测:通过相对精度评定的方法,布设多条交叉重叠的测线,获取交叉重叠点水深数据进行误差分析。
(2)系统间比测:利用多波束和单波束系统在同一区域分别获取水深数据,对同一坐标位置进行水深比较分析。
(3)三维模型比测:对2套系统各自获得的水下地形数据,进行三维建模,对所建立的模型进行比较分析。
3.1 系统自符性比测
3.1.1 较平坦区域
选取潜坝工程下游附近较平坦区域,水下高程在-10.4~-11.9 m范围内,水深大概在12 m,同一测线上连续测量5次,选取54个点进行统计分析。结果见表1。

表1 平坦区域两种系统自符性误差统计表Table 1 Statistics of errors of the two sounding systems in flat area
3.1.2 坝体区域
由于是在水下抛投塑枕筑坝,坝体区域地形起伏较大。水下高程在-20.3~-12.3 m范围内,在同一测线上连续测量5次,对52个点进行统计分析。结果见表2。
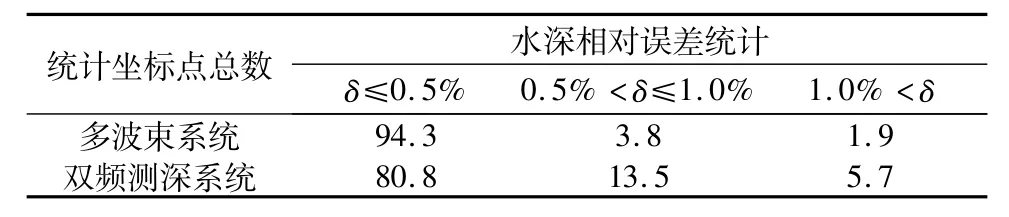
表2 坝体区域两种系统自符性误差统计表Table 2 Statistics of errors of the two sounding systems in dam area
通过表1、表2,可以看出多波束测深系统的自符性在平坦和坝体区域的相对误差小于0.5%的比例在94%以上,而双频测深系统在坝体区域的相对误差小于0.5%的比例在81%以下。由此可见,多波束测深系统的自符性优于单波束测深系统,特别是在水下地形起伏较大的区域,优势更加明显。
双频测深仪在水下地形起伏较大的区域自符性较差的可能原因有:①双频测深系统在测量时没有进行姿态补偿。在测量时,船随着水流摇晃,此时所测的水深不是换能器垂直向下的深度,而是一个倾斜的长度。在地形起伏较大的区域,更容易造成偏差。②双频测深系统换能器的波束角大于多波束的波束角,在水底的波束“脚印”较大,1.5°波束在垂直下方的“脚印”为0.5 m[1],在较大的“脚印”中,只获取一个简单的深度值,会加大测量误差。
3.2 系统间比测
在长江镇扬河段和畅洲左汊潜坝工程范围内,选取100 m×600 m的一块区域,采用多波束进行全覆盖扫测,双频测深仪沿断面CS0+800、CS0+850和CS0+900进行测量,抽取两者原始数据中坐标接近的50个测点(X,Y相差不超过0.4 m)水深进行比较,对照成果精度在规范允许的范围内,进行相对误差统计,两种测深技术比测结果见表3,系统间相对误差绝对值统计表见表4,两种测深技术比测局部地形图见图2。

表3 两种测深技术比测结果Table 3 The comparison of results between the single beam and multi-beam sounding technologies

表4 系统间相对误差绝对值统计表Table 4 Statistics of relative errors between the single beam and multi-beam sounding technologies
两种测深技术比测结果显示大部分点之间相对误差控制在 1.0%以内,而 1.0% <δ≤5.0%的点主要出现在坝体区域(地形起伏较大),极少数点的相对误差大于5.0%。可能原因是双频测深系统在测量时没有进行姿态补偿。测量时,船在很小的晃动下,由于水下地形起伏较大,会引起较大的测量误差,因此系统间相对误差较大的数据绝大部分出现在坝体区域。
3.3 三维模型比测
在长江镇扬河段和畅洲左汊潜坝工程区域,分别用多波束和双频测深仪进行测量,然后在Sufer中建立三维模型,对模型进行比对分析。
通过图3、图4对比分析,多波束全覆盖扫描坝区三维模拟图能够比较清楚地反映出潜坝护坡区域、潜坝、下游附近的冲刷坑等水下情况,而双频测深仪所测的坝区三维图的潜坝护坡区域、潜坝、下游附近的冲刷坑等水下情况比较模糊,棱角不清晰。

图2 两种测深技术比测局部地形图(红色为双频测深仪数据)Fig.2 Partial terrain map obtained by the two sounding technologies
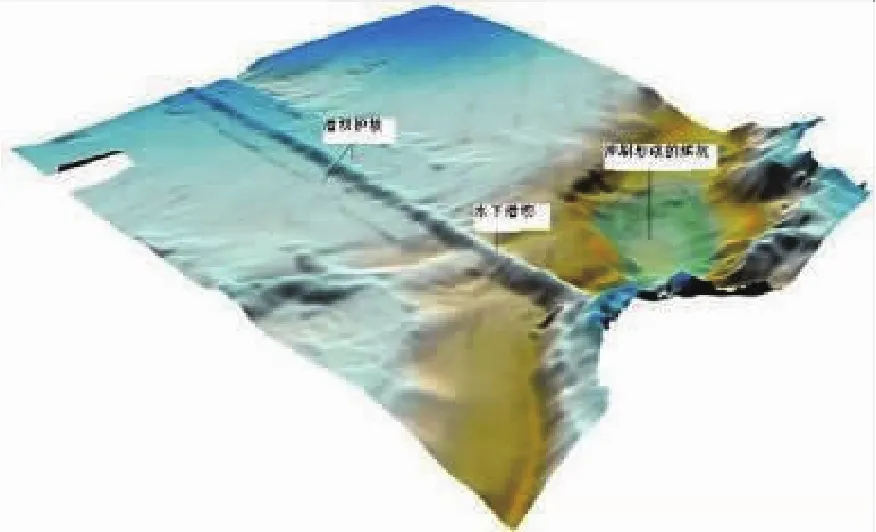
图3 多波束全覆盖扫描坝区三维模拟图Fig.3 Three-dimensional simulation diagram of the dam in multi-beam sounding technology
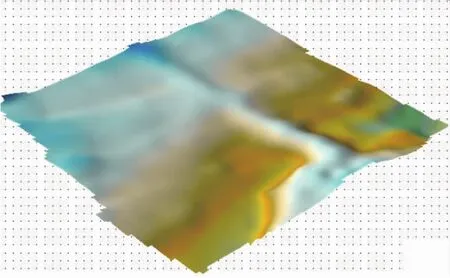
图4 双频测深仪测量的坝区三维模拟图Fig.4 Three-dimensional simulation diagram of the dam in double-frequency sounding technology
多波束对水下是进行全覆盖扫描,而常规的单波束测深技术是按照一定间距的断面进行测量,无法做到全覆盖、无遗漏。因此,在根据测量数据进行三维模拟时,多波束全覆盖扫描的三维图形能更细致、更全面和更准确地反映水下的实际情况。
4 结 语
(1)本次将多波束测深方法技术成功地应用于长江镇扬河段和畅洲左汊潜坝工程测量,并为该技术在水下工程进一步开展工作,积累了工作经验,打下了坚实的基础。
(2)多波束与单波束相比,具有高分辨率、高精度、全覆盖的特点,且精确、高效、快捷、直观的优势十分显著。
(3)在水深位于0.5~4 m时,为了避免船体和多波束探头与河底不明坚硬物碰撞,可用单波束测深技术配合多波束的测量。
(4)在使用多波束进行工作时,由于影响因素比较多,应针对所解决的问题的性质及要求,在测量工作方法、技术及数据处理方法等方面采取相应的措施,才能取得良好的效果。
[1] 李成刚,王伟伟,阎 军,等.传统多波束系统与具有相干特点的多波束系统的研究[J].海洋测绘,2007,
27(2):70-80.(LI Cheng-gang,WANG Wei-wei,YAN Jun,et al.The study on traditional multibeam and interferometric multibeam[J].Hydrographic Surveying and Charting,2007,27(2):70-80.(in Chinese))
[2] 李家彪.多波束勘测原理技术与方法[M].北京:海洋出版社,1999.(LI Jia-biao.Theory and method multibeam sounding system[M].Beijing:Hydrographic Publishing,1999.(in Chinese))
[3]刘经南,赵建虎.多波束测深系统的现状和发展趋势[J].海洋测绘,2002,(5):3-6.(LIU Jing-nan,ZHAO Jian-hu.The development of multi-beam sounding System[J].Hydrographic Surveying and Charting,2002,(5):3-6.(in Chinese) )
Application Comparison between Multi-beam Sounding Technology and Single-beam Sounding Technology in Underwater Engineering
ZHAO Gang1,WANG Dong-mei1,HUANG Jun-you1,WU Jie2
(1.Jiangsu Hydraulic Research Institute,Nanjing 210017,China;2.Nanjing Changjiang River Channel Management,Nanjing 210011,China)
Presently,the multi-beam sounding system is the most advanced apparatus in river underwater survey technology.By comparing measured results of multi-beam sounding system and single-beam sounding system,the article analyses the causes of error and precision for the two systems.It has been proved that multi-beam sounding system has distinct advantage in underwater engineering survey,and the test results provide a scientific evidence for the wide application of multi-beam sounding system.
multi-beam;double-frequency depth sounder;comparing measurement;error
P204
A
1001-5485(2010)02-0020-04
2009-01-08;
2009-02-24
赵 钢(1975-),男,湖南株洲人,硕士研究生,主要从事水下测绘研究,(电话)025-86455646(电子信箱)zgac@sina.com。
(编辑:罗玉兰)
