深空光学敏感器“拖尾图像”的处理方法研究
2010-12-11毛晓艳王大轶辛优美
毛晓艳,王大轶,辛优美,应 磊
(1.北京控制工程研究所,北京 100190;2.空间智能控制技术国家级重点实验室,北京 100190)
深空光学敏感器“拖尾图像”的处理方法研究
毛晓艳1,2,王大轶1,2,辛优美1,2,应 磊1,2
(1.北京控制工程研究所,北京 100190;2.空间智能控制技术国家级重点实验室,北京 100190)
主要研究深空探测巡航段的光学敏感器拖尾图像的处理方法,通过导航信息预测得到系列特征运动轨迹点,对预测点进行修正并进行特征模板的提取和归一化处理,然后进行交互相关,给出多个轨迹线上匹配的对应点位置,计算偏移量,对轨迹点进行修正,更新模板进行相关,再次迭代,直到结果收敛.最后对多个点的位置进行加权平均,得到准确的相对角矩信息,用于星图识别提供小行星指向信息,文中给出了图像处理的仿真结果.
深空探测;光学导航;拖尾图像处理;互相关
深空探测是航天三大活动领域之一,它有助于人类理解宇宙的产生与发展、生命演化和行星演化等问题[1].在深空探测一些特殊的飞行阶段,例如接近、绕飞、着陆、附着、撞击等过程需要精确获得探测器相对位置、姿态,但是由于深空飞行的距离较远,地面测控受限且不能满足实时性需要,因此提出了航天器的高级自主导航和智能控制能力需求.因为深空环境的特殊性,测量手段非常有限,能简易获得丰富导航信息的就是光学图像,航天器通过传感器获取光学图像信息,图像处理后来确定自身的准确位置和航向信息,其独立性、准确性、可靠性以及信息完整性等优势已经使其成为一种很重要的精确导航方法[2].
国外在深空探测的研究上,很早就提出了星际航天器自主导航理论,并结合大量的空间飞行试验进行了新技术的开发研制.NASA的深空一号、星尘探测器,日本的隼鸟号,欧空局的罗塞塔等等,对飞行过程中的巡航段、接近环绕段、飞越段以及着陆段的光学导航技术进行了探索性的研究[3-6].由于不同飞行阶段的不同成像特性,每种方法各有侧重,针对性不同.
本文主要研究深空探测巡航段的图像处理方法,由于巡航段选择小行星作为导航星,而小行星的星等较弱,为9~12等星,敏感器需要长时间的曝光才能成像.长时间曝光的过程中,由于探测器平台运动,导航天体成像不再是单个星点,而是随着扰动改变在图像中的位置,形成轨迹线,成为拖尾图像.由于曝光过程中无法记录每个时刻对应的星点图像位置,图像处理只能针对最终形成的复杂轨迹线图像进行,对其中心的准确提取带来了难度,恒星敏感器上采用的星点质心算法不再有效,需用研究新的提取技术.
1 主要研究内容
1.1基本原理
导航计算需要从拖尾图像中获取导航星之间的相对夹角信息,对图像处理而言就是每两个星体的相对位置信息.为了保证可解,需要一个小行星信息,还需要最少3颗恒星信息.因为曝光的时间比较长,无法从图像中得到某一时刻对应的像点,只能从轨迹特征中找到具有唯一对应轨迹运动特征的同一时刻对应点,这些点代表的相对位置信息都是相同的,可以利用这些点间的相对位置来表示星体的相对位置[7].处理算法的描述如下,假设图像中有n(n≥4)个目标的轨迹线,每条轨迹线上具m个特征运动轨迹点,称之为节点,在n个目标上的同一个节点处取模板,进行交互相关,修正这些点的模板中心趋向同一个特征位置,这些模板中心就代表利用这个轨迹点求得的位置.同样可得到其他m-1个轨迹点代表的位置信息,然后求两两目标之间的相对位置并进行加权平均,得到最终的测量值.
1.2具体实现
1.2.1预测信息
根据规划的轨迹,选择用于导航的小行星和恒星,由于飞行器的姿态通过星敏感器测量已知,所以小行星和恒星在导航敏感器视场内的大致位置是可以预测得到的[8].飞行器上安装的惯性组件也可以监控飞行器的姿态扰动,通过对运动监测的分析,可以给出特征运动轨迹点的大致位置,由目前的敏感器精度分析可以认为预测的轨迹点精度在10个像素以内.
轨迹点的预测就是在敏感器的测量坐标确定以后,根据导航星的初始矢量表示,结合敏感器的相关参数,计算出导航星在像平面下的坐标表示.为了修正预测点的位置,提高其精度,利用预测的轨迹点静态成像和动态成像相结合形成运动轨迹模板,模板和拍摄图像的预测区域进行粗匹配,可以修正轨迹点的预测位置,将精度提高到2个像素左右.
静态成像利用星点光斑能量的高斯点扩散函数来表示,如式(1)所示

式中,m,n表示像素坐标,I(m,n)表示在此像素下收集的光电子数,I0为单位时间投射到光敏面上的光信号能量产生的光电子数;T为积分时间;(x0,y0)为星点像能量中心(即质心);σPSF为高斯弥散半径.
动态成像利用在静态成像的基础上采用直接积分法来实现:
选择适合的步长时间Δt,Ik-1(m,n)表示k-1个步长时间内的像素光电子数,Ik(m,n)表示第k个步长时间内的像素光电子数,(x0(k),y0(k))为k步长时的星点像能量中心,所有步长时间的光电子数叠加即得到该像素位置最终的像点能量.步长时间越短,像点密度越大,当每个步长时间内的像点可以连接时就形成连续的轨迹线.
为了提高运算效率,动态成像只需要模拟轨迹线在节点处的运动特征,不需要所有的节点进行参与,只需要该时刻位置、其上一时刻和下一时刻(或上2~3时刻和下2~3时刻,由运动频率和采集频率确定)的位置进行动态仿真形成小面积的预测轨迹图像即可.
1.2.2模板选择
在图像的预测位置处取窗口,对窗口内的目标星轨迹进行判断,如果星体的亮度偏暗,不满足设定的阈值要求,则该点不满足相关的前提,进行舍弃.如果星体的轨迹出现断裂或宽度过小,则也认为不满足相关要求,进行舍弃.轨迹变化过于缓和的节点认为不满足运动特性突出的要求,不利于相关匹配同样进行舍弃.满足亮度要求,又满足宽度要求和运动突出性要求的位置认为是可参与交互相关的点,进行保留,并以预测位置为中心,利用轨迹模板进行修正,然后提取匹配模板.
星点动态轨迹图像节点是否满足运动特性突出的判断条件如下:

其中中心节点坐标为(u0,v0),相邻两节点分别为(u1,v1)和(u2,v2).当cosφ≥thred时,该中心节点认为是满足要求的轨迹节点,thred阈值根据运动规律可以调整.
节点的判断可保留运动轨迹变化更明显的节点,有利于提高后续匹配的精度.但是如果在真实的星点轨迹图像上进行节点判断,计算会相当复杂,需要大量的滤波和提取技术,本文利用了1.2.1节中预测得到的轨迹图像,其节点坐标已知,计算简单,即可提高节点模板的独特性,又减少了利用真实星点轨迹进行分析判断的算法处理复杂度.
提取匹配模板后对其进行归一化,假设匹配模板为Fij,大小为m1×n1,对其进行归一化处理:

在其他目标的预测位置取原始图像的窗口S作为待匹配区域,大小为M×N,其中Mgt;m1,Ngt;n1,把S分成一系列的小区域Sij,每个大小为m1×n1,并对每个区域Sij进行如式(4)所示的归一化处理.
1.2.3互相关
因为每个匹配模板的中心位置都是在单个轨迹线上进行的特征点提取,所以并不能准确反映轨迹线之间的相对关系,需要进行更高精度的计算来修正这些成组的节点之间的位置关系.将某一组对应的节点图像进行放大,来说明所要采取的互相关算法,如图1所示.

图1 交互相关匹配原理图

使用最小二乘法可以求解a,b,c这3个偏移量,大于3个目标的方程都可以依式(5)进行改写,方程的个数为n(n-1),n为目标个数.
相关匹配时,将模板和待选择区域的归一化结果进行卷积,cij=F⊗Sij,得到系列相关系数cij.为了使匹配的结果优于1个像素,保留相关系数最大和两个次大的位置值,进行二次曲线的拟和,求得峰值处的位置值作为匹配的最佳结果,然后代入式(5),求解偏移量a,b,c.
得到偏移量后,在rA、rB、rC上修正偏移向量,利用新得到的位置点作为新的特征点,建立新的匹配模板,重复上述互相关的过程,得到新的修正偏移量,如此迭代循环,直到位置偏移量小于设定的残差时,将模板中心作为该条轨迹图像上节点的最终位置输出.
1.2.4加权平均
因为每条轨迹线上选取了多个节点,可以得到多组相对位置.为了修正最后的结果,对得到的多组相对位置进行方差求取,认为方差过大的结果属于交互相关有误的,进行剔除.对剩下较好的数据利用其相关系数进行归一化得到ci,将其作为该结果的加权系数进行加权,计算多组相对位置di最后的高精度结果d,如式(6)所示:
2 仿真结果
2.1实例1
仿真得到的拖尾图像效果如图2所示:

图2 实例1仿真的拖尾图像
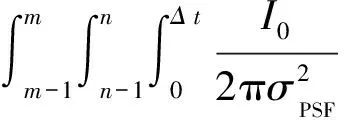
选取的节点判断效果如图3所示:
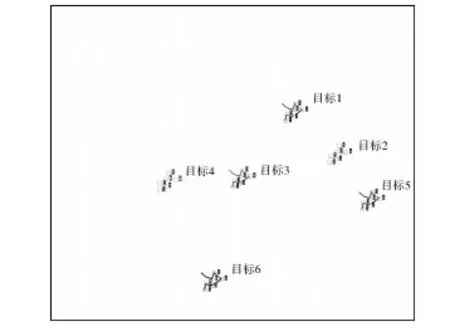
图3 实例1提取的节点效果图
选定6个目标进行交互相关,每个小框的中心为提取的该节点中心.得到的最终结果如表1所示.
由结果可以看出,一般迭代5次以内,相对位置误差已经很小,在较好的轨迹特征和成像质量下精度可以达到0.1个像素.
根据表1中的数据提供角矩输入,经过星图识别,得到小行星的空间指向信息为:(0.6605454866,0.7352658255,-0.1518677989),与真值相比的指向误差为0.0348″.
2.2实例2
仿真得到的拖尾图像效果如图4所示.
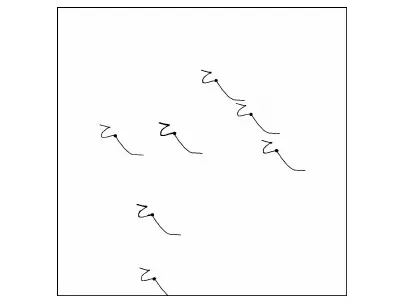
图4 实例2仿真的拖尾图像
选取的节点判断效果如图5所示.

图5 实例2提取的节点效果图
选定6个目标进行交互相关,每个小框的中心为提取的该节点中心.
得到的最终结果如表2所示.
经过星图识别,得到小行星的空间指向信息为:(0.6605448527,0.7352663165,-0.1518681873),与真值相比的指向误差为0.188″.
3 结 论
本文研究了深空探测“拖尾图像”的处理方法,利用仿真图像进行了算法验证,将提取的节点进行交互相关,得到了较为准确的相对位置信息,最终获得小行星的高精度空间指向.同时在研究中发现由于弱目标的灰度很低,交互相关时容易产生误差,需要在后续的工作中进一步加强对模板的处理和相关算法的研究,提高弱小目标相关匹配的精度和算法的鲁棒性.
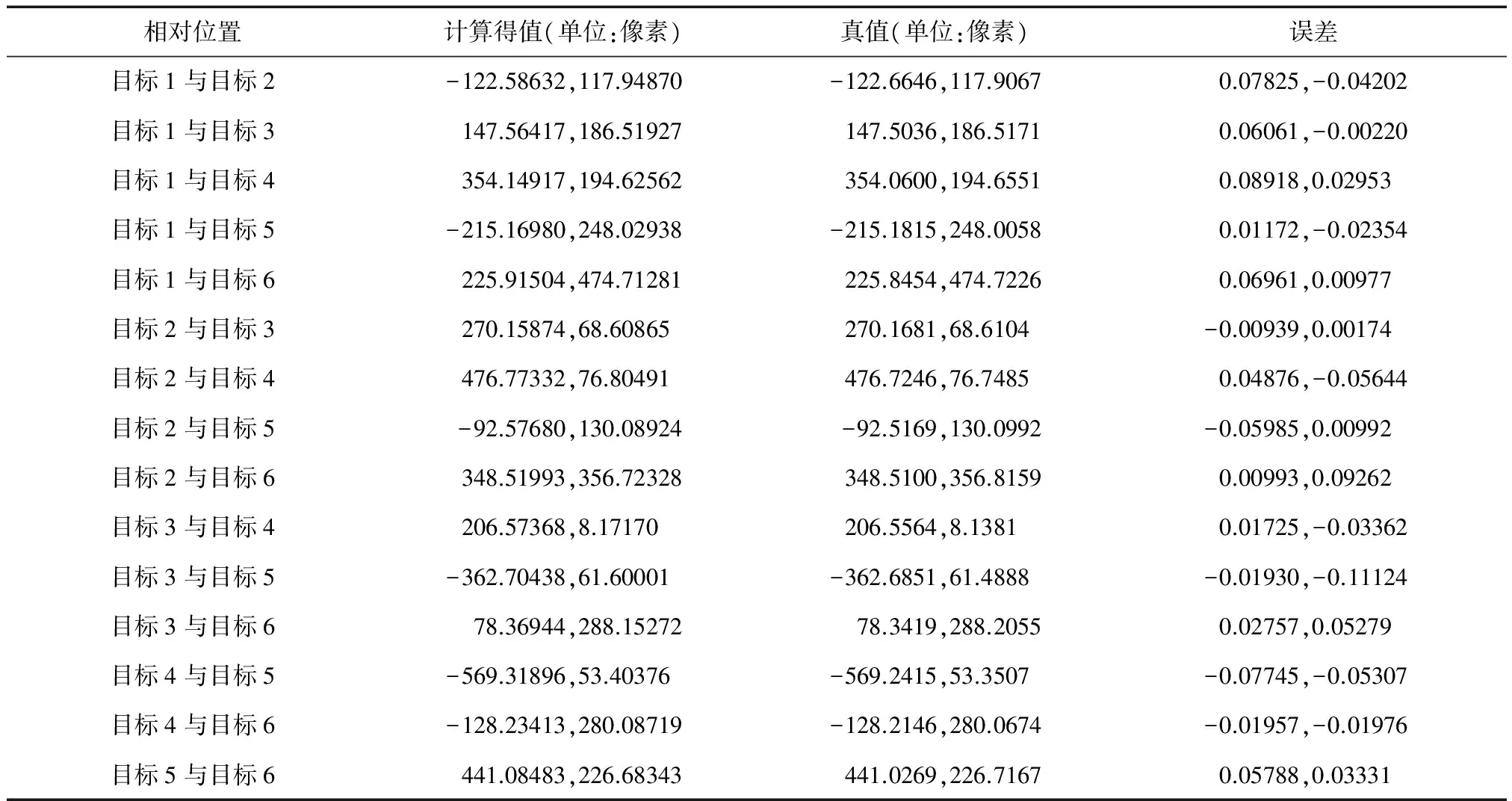
表1 实例1图像处理结果

表2 实例2图像处理结果
[1] 邓湘金,张熇,褚桂柏.国外深空探测发展历程及对我国的启示[C].中国宇航学会深空探测技术专业委员会第一届学术会议,哈尔滨,2005
[2] Bhaskarran S, Riedel J E, Synnott S P.Autonomous optical navigation for interplanetary missions [J].Space Sciencecraft Control and Tracking in the New Millennium, 1996, 2810: 32-43
[3] Rayman M D, Lehman D H.NASA’s first new millennium deep space technology validation flight[C].IAA Paper IAA-L-0502, the Second IAA International Conference on Low-Cost Planetary Missions, Laurel, MD, April 1996[4] Carranza E, Kennedy B, Williams K.Orbit determination of stardust from the annefrank asteroid fly-by through the wild 2 comet encounter [J].Advances in the Astronautical Sciences Space Flight Mechanic, 2005,119(2):8-12
[5] Uo M, Baba K, Kubota T, et al.Navigation, guidance and control of asteroid sample return spacecraft: MUSES-C [J].NEC Research and Development, 2001,42(2):188-192
[6] Sanchez P, Jose M, Rodriguez C J.Analysis of Rosetta interplanetary navigation [C].The 54thInternational Astronautical Congress of the International Astronautical Federation, Bremen, Germany, Sep.29-Oct.3, 2003
[7] Vaughan R M, Riedel J E, Davis RP, et al.Optical navigation for the Galileo Gaspra encounter [C].Astrodynamics Conference, AIAA Paper 92-4522, Hilton Head, South Carolina, August 1992
[8] CARL C L.Accuracy performance of star trackers - A Tutorial [J].IEEE Transactions on Aerospace and Electronic System, 2002, 38(2): 587-597
ProcessingMethodof“TrailedImage”forDeepSpaceOpticalSensor
MAO Xiaoyan1,2,WANG Dayi1,2,XIN Youmei1,2,YING Lei1,2
(1.BeijingInstituteofControlEngineering,Beijing100190,China;(2.NationalKeyLaboratoryofScienceandTechnologyonSpaceIntelligentControl,Beijing100190,China)
The core of this article puts emphasis on processing trailed images in cruise phase in deep space exploration for automatic optical navigation.Depending on measure information of a navigation system, the characteristic points expressing the sharp movement are obtained.These points are revised, picked up and normalized.Then the multi-cross-correlations can be done and results are correlation points on different extended image trails.After offset is calculated, the points are updated, then be revised, picked up and cross-correlated iterated again and again, till results are convergent.The individual measurements are weighted by the correlation ratio.Correct match points are used to identify the stars to get the pointing information about the asteroid including the simulation result.
deep space exploration;optical navigation;trailed image process;cross-correlation

TP751
A
1674-1579(2010)02-0001-05
2009-11-11
毛晓艳(1977—),女,湖北人,高级工程师,研究方向为计算机视觉与图像处理(e-mail: cicely_mao@yahoo.com.cn).