三轴加速度传感器在智能车路径识别中的应用
2010-12-07周凤星
陈 虎,周凤星
(武汉科技大学冶金自动化与检测技术教育部工程研究中心,湖北武汉430081)
0 引言
目前,智能车路径识别方法有2种:一是采用反射式红外光电管,根据不同颜色对红外线的吸收程度不同来提取特征信息,从而得知轨道的路径。这种方法的缺陷是光电管的前瞻不够远,反射光线受外界光线干扰很大;二是采用CCD摄像头获取轨道的图像信息,通过数字图像处理方法得到轨道路径,这种方法的缺陷是过弯和坡道时容易采集到轨道以外的信息而导致智能车偏离轨道,而且,图像数据存储量大,信息处理比较复杂[1]。
本文利用Freescale公司的高灵敏度三轴加速度传感器MMA7260Q可以测量智能车惯性大小,选取最佳重心位置,并能准确定位智能车处于直线、弯道、坡道、漂移等运行状态;利用加速度传感器能够提前预测路径,并判断何时刹车效果最佳。实验结果证明:结合加速度传感器具有很强的抗干扰性,提取角度信息更准确,确保了智能车在直道上能够以较高的速度行驶,在弯道则能基本不失速平滑地过弯。
1 硬件电路设计
1.1 MMA7260Q信号采集模块设计
加速度信号采集模块如图1所示。X,Y,Z 3个相互垂直方向上的加速度由G-Cell传感单元感知,电容值经过容压变换器转换为电压值,经过增益放大器、滤波器和温度补偿以电压的形式作为输出信号[2],经过放大滤波处理,将所需模拟信号调整至一个合适的范围,再转换为数字信号送数据处理单元。

图1 加速度信号采集结构图Fig 1 Structure diagram of acceleration signal acquisition
1.2 加速度传感器与单片机的接口电路
MMA7260Q与MC9S12DG128B的硬件接口电路如图2所示[3]。微处理器内部包含完整的地输入缓存器、模拟开关电路、可编程增益放大器和A/D转换器以及数字滤波器,使用非常方便。g1,g2输入低电平,灵敏度达到800 mV/gn。当Mode=1时,加速度传感器处于正常工作状态。X,Y,Z输出端分别接RC滤波器,再通过高输出驱动运算放大器TLV4112构成电压跟随作用,输出稳定的直流电压信号。
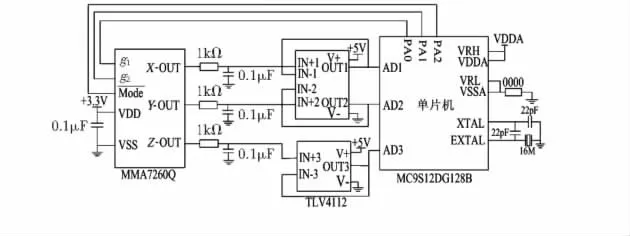
图2 MMA7260Q与MC9S12GDG128B接口电路Fig 2 Interface circuit of MMA7260 and MC9S12DG128B
2 软件设计实现
本设计采用CodeWarrior软件与BDM作为调试工具,编程环境支持C语言和汇编语言的程序设计,大大方便了用户的程序设计,提高了系统开发效率。本设计程序代码使用 C语言编写[4]。
2.1 A/D采样流程设计
本设计主要包括单片机初始化模块和实时路径检测模块。
1)单片机的初始化模块包括:I/O模块,AD模块,定时中断模块初始化。
2)实时路径检测模块:红外光电传感器和CCD摄像头检测特征信号,利用加速度传感器检测角度信号,将返回信号输入单片机的输入端口,程序不间断地读入输入端口的信号,结合判断语句,得出合适的PWM控制信号。
加速度信号采集部分设计流程图如图3所示。

图3 程序流程图Fig 3 Flow chart of program
2.2 数字滤波算法设计
由于加速度传感器三轴之间差异和较高灵敏度,防止在运动过程中由于智能车的抖动引起的误差,对单片机采样得到的电压值进行归一化处理,最后可得到各方向传感器的相对电压值。具体实现方法:让智能车后轮转动起来,分别记录各传感器输出信号的最大值和最小值,用最大值减去最小值得到各传感器在运动过程中的输出范围。在智能车行驶过程中将各方向传感器输出的信号值减去最小值,再除以各方向传感器的输出范围即可得到其相对输出值。根据g1=g2=0,最小值对应着-1.5gn,最大值对应着+1.5 gn,静止时各向加速度值为0,加速度范围为-1.5~。
通过每只传感器的相对输出值与加速度值作加权平均就可以算出智能车相对于静止状态的各轴相对偏移位置
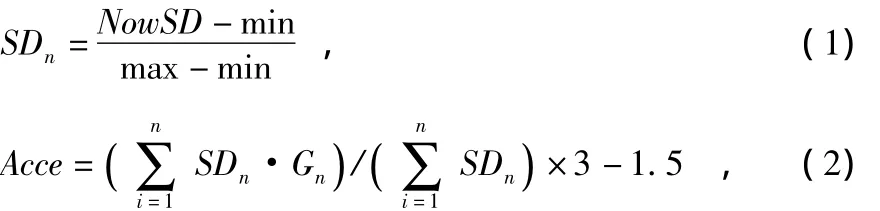
式中 Acce为各个方向加速度值;SDn为当前加速度相对输出值;Gn为当前采样电压值所对应的加速度值;NowSD为当前采样电压值。
2.3 路径识别规则
X-OUT表示智能车前后方向加速度信号,Y-OUT表示智能车左右方向加速度信号,Z-OUT表示智能车上下方向加速度信号.采样值经过数字滤波以后,通过Matlab绘制出各个方向输出波形图。由于智能车的底盘不可能保持绝对水平,车身可能会向前倾斜或者向后倾斜,所以,Y-OUT,X-OUT,Z-OUT输出值都有5%的误差,当处于匀速直线运动时,采样值在100~110之间波动。通过加权平均近似为105,125 对应 +1.5gn,80 对应-1.5gn,通过多次实验总结出路径判断规则表,如表1所示。
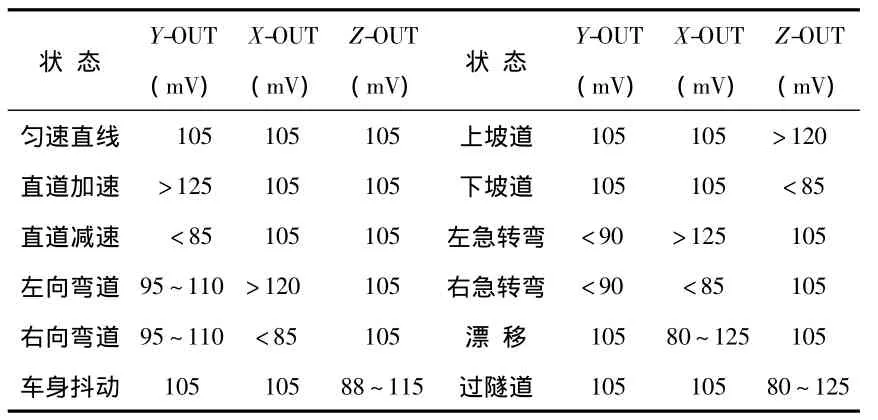
表1 路径判断规则表Tab 1 Rule table of path recognition
3 实验结果分析
测试1:当智能处于匀速直线运动时,对 X-OUT,YOUT,Z-OUT分别采样600次,测试电压为3.42 V。计算出600个点的期望值是105,方差为2.864 822,标准差为1.701417622。加速度采样值正态分布如图4,由此可见加速度传感器静止时输出采样值近似为105。

图4 传感器采样值分布Fig 4 Distribution of sensor’s sampling value
测试2:当智能车处于匀速直线运动时,在同一时刻随机的对X-OUT,Y-OUT,Z-OUT采样50次。如图5所示,加速度传感器输出值比较稳定,而且,三轴输出信号具有较大相似性。
测试3:当智能车围绕预先设定好的轨道上完成一圈后,同一时刻随机的对加速度信号进行采样,得出Y-OUT,X-OUT,Z-OUT的输出波形,如图6所示。
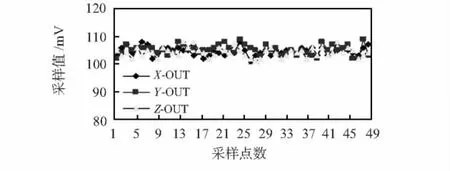
图5 同一时刻三轴传感器采样值分布Fig 5 Distribution of three-axis sensor’s sampling value at the same time

图6 不同轴向输出波形图Fig 6 Waveform of different axis direction output
由图6(a)可知,第1个尖峰表示智能车处于加速状态,第2个尖峰表示智能车处于减速状态;由图6(b)可知,第1个尖峰表示向右拐弯,第2个尖峰表示向左拐弯;由图6(c)通过信号频率判断为坡道,可知第1个尖峰表示上坡,第2个尖峰表示下坡,整个过程经过了3次坡道。
测试4:结合红外光电管和CCD摄像头,再加上三轴加速度传感器,观察智能车的路径识别和行驶路线,效果图如图7。从图中可以看出:智能车走了很多近道,响应速度非常快。

图7 加速度传感器应用效果图Fig 7 Effect graph of accelerometer application
由以上测试,智能车路径识别的关键在于判断异形路径并快速、准确地响应。智能车行驶过程中,利用加速度传感器输出信号波形可以判断出前方路径,从直道入弯、下坡过弯等情况都能顺利通过,并增加了智能车对路径的跟随性能。
4 结束语
MMA 7260Q是一种电容式加速度传感器,融合了信号调理、单极低通滤波和温度补偿技术。成本低、功耗低,测试中加速度信号稳定性和灵敏度都达到了预期的效果。从而提高了系统的控制精度,使舵机响应速度变快。
基于加速度传感器的路径识别设计方法,相比传统的光电感应和图像捕捉抗干扰性更强,数据处理更简单。可以广泛用于无人驾驶智能汽车、智能仪表、机器人步态特征提取和故障诊断等。
[1]卓 晴,黄开胜.学做智能车—挑战“飞思卡尔”杯[M].北京:北京航空航天大学出版社,2007.
[2]苏维嘉,王旭辉.新型加速度传感器在倾角测量中的应用研究[J].机械研究及应用,2007,20(5):63-65.
[3]王 威.HCS12微控制器原理及应用[M].北京:北京航空航天大学出版社,2007:10.
[4]邵贝贝.单片机嵌入式的在线开发方法的应用[M].北京:清华大学出版社,2004:10.
[5]侯向锋,刘 蓉,周兆丰.加速度传感器MMA7260在步态特征提取中的应用[J].传感技术学报,2007,20(3):507-508.