汽车纵向防撞报警系统设计与实例分析
2010-12-07贺大松门延会
贺大松,杨 平,门延会
(1.宜宾职业技术学院 现代制造系,四川宜宾644003;2.电子科技大学机械电子工程学院,四川成都611731)
0 引言
高速公路的交通安全已成为越来越重要的社会问题,为了防止汽车与前方物体发生碰撞,就要根据汽车与前方物体的距离调节汽车的车速,使汽车始终在安全车速下行驶,减少事故发生。在过去的几十年中,人们的注意力主要集中在汽车被动安全性方面,但这并不能从根本上解决汽车在行驶中碰撞所造成的破坏,而且,目前主动防撞安全技术成本较高,尚不能普及。因此,从技术措施方面寻求对策,进行高速公路汽车预防报警系统的开发研究就显得尤为必要[1]。本文从预防碰撞事故发生的角度出发,提出了一种纵向碰撞预防报警系统,可以最大限度地降低交通事故率,提高了汽车的主动安全性能。
1 汽车纵向防撞报警系统结构
系统结构如图1所示,系统硬件基本组成主要包括:控制单元、传感器、执行器、电源等几部分。其中,主控单元选用AT89S52芯片;传感器主要包括:测距传感器、测速传感器、制动信号开关、油门信号开关、离合器信号开关等;主要执行器包括:灯光报警装置、声音报警装置等[2,3]。

图1 系统结构示意图Fig 1 Schematic diagram of system structure
2 系统运行模式
采用激光测距雷达检测车道前方车辆的距离,距离数据被传送到控制单元,控制单元收集车速信号、制动踏板位置信号、油门踏板位置信号、离合器踏板位置信号进行处理,并确定当前数据所适用的报警模型。该报警系统分2种形式:两车距离小于报警距离时,黄灯点亮,并用弱声长音报警;两车距离小于报警行车安全距离时,红灯闪烁外加短促宏亮声音报警。无论系统工作在何种状态,只要探测到驾驶员已采取措施(抬油门或踩制动),则报警抑制。另外,在车速低于40 km/h时,或车辆在转弯时,均将报警抑制[4]。
3 汽车纵向防撞报警系统模拟实现
为了检验系统的功能,测试系统的性能,设计了一套模拟程序[5,6]。用计算机代替激光测距传感器给单片机传送车距信息[7],用波动开关代替转向、制动、油门踏板传感器来给单片机发送信号。当开关处于开状态时,没有转向、制动、减速信号产生,不产生报警抑制。当给出的信号超过安全距离信号时,实现报警。当产生报警信号时,将其中一个开关信号设置为关闭状态,测试系统根据该状态做出抑制报警反应。该模拟实验硬件设计原理如图2所示。

图2 模拟实验硬件设计原理图Fig 2 Principle diagram of the simulation experiment’s hardware design
3.1 单片机与计算机之间的通信接口
由于MCS—51单片机输入、输出电平为TTL电平,计算机配置的是RS—232C标准串行接口。因而,可以采用RS—232C标准进行点对点的通信连接[8]。工作原理如图3所示,信号采用 RS—232C电平传输,电平转换芯片采用MAX232。

图3 PC与AT89S52通信示意图Fig 3 Schematic diagram of communication between PC and AT89S52
3.2 通信协议
PC机通过串口调试助手软件与AT89S52通信,提供距离信号,AT89S52程序采用汇编语言编写[9,10]。双方通信协议约定为
1)波特率设置:9600 bps;
2)数据传输格式:1个起始位,8个数据位,1个停止位;
3)数据传送方式:PC机采用查询方式发送和接收数据,AT89S52采用中断方式接收信息。
3.3 通信软件设计
l)串口通信测试程序
通过串口调试助手软件,从键盘随机输入一个信号给PC机,PC机将该信号发送给单片机,单片机收到PC机发来的信号后,回送同一信号给PC机,并在屏幕上显示出来。只要屏幕上显示的信号与所键入的信号相同,则表明PC机与单片机之间的通信正常。
单片机通信程序框图见4所示。
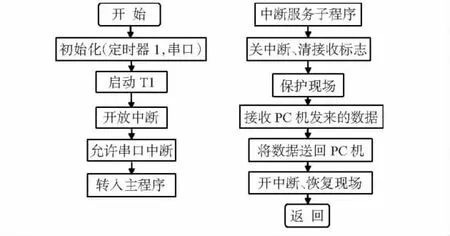
图4 单片机通信流程图Fig 4 Flow chart of SCM communication
2) 模拟系统工作程序
为了得到在不同车速下的报警和制动距离,实验中,先将速度作为一个确定的参数设定,然后将距离作为一个变化量,由PC机发送给单片机,送入系统模型进行运算,得到报警和制动距离,再改变速度得到不同速度下的报警距离与制动距离。
要求送入的速度参数值v1从40 km/h开始,每增加10 km/h设一个值,最高不超过120 km/h,折合为从11 m/s开始,每增加3 m/s,设定一个车速,最高速为34 m/s。最大制动减速度取车辆在干燥水泥路面的最大制动减速度,据经验数据取a1=6 m/s2。当前方车辆静止时,驾驶员的反应时间取值tf2=1.5 s,当前方车辆为运动车辆时,驾驶员的反应时间取值tf1=3.0 s。程序运行一次的时间为0.25 s,则两车的相对速度为Vrel=(D2-D1)/0.25。
3)单片机主控制程序如图5所示。
4 实验结果与数据分析
取最大制动减速度为6 m/s2(21.6 km/h),在特定速度下,测试相对运动车辆之间报警距离与制动距离,测试数据如表1所示。

图5 主控程序流程图Fig 5 Flow chart of main control program

表1 实验数据记录表Tab 1 Data record sheet of the experiment
按照《道路安全法》和《高速公路交通管理办法》第15条之规定:机动车在高速公路上正常行驶时,同一车道的后车与前车必须保持足够的行车间距。正常情况下,当行驶时速在100 km/h时,行车间距为100 m以上;时速70 km/h时,行车间距为70 m以上,遇到风、雨、雪、雾天或者路面结冰时,应当减速行驶。
可以看出:在车辆行驶过程中,车速为72km/h,前车静止状态下,报警距离为107m,制动距离为76m;两车相对减速运动时,报警距离为105 m,制动距离为60 m。在车辆行驶过程中,车速为111.6 km/h,前车静止状态下,报警距离为186 m,制动距离为132 m;两车相对减速运动时,报警距离为139 m,制动距离为87 m。由于在实际高速公路行车中,应尽量避免使用刹车制动,特别是紧急刹车制动,而是采用减速措施以保持适当的跟车距离。因此,在此模型中,报警距离值的选取符合法律规定。
在输入报警距离与制动距离时,均能实现不同方式的报警,且硬件与软件匹配,系统可以稳定工作。
5 结论
为了保证交通安全,本文设计开发了汽车纵向报警系统。在设计该系统的过程中,主要采用激光雷达信号来测量车距,运用MCS—51来进行信号处理和运算判断,技术上可行,通过模拟实验验证,系统达到了预定功能,且性能稳定。
[1]李 峰.智能交通系统在国外的发展趋势[J].国外公路,1999,19(1):1-5.
[2]王唯合,王宏志,郭宏宇,等.基于CAN总线的汽车防撞报警系统[J].长春工业大学学报,2007,26(1):287-291.
[3]仇成群,胡天云.基于超声波的汽车防撞报警系统的设计[J].制造业自动化,2009,31(4):75-77.
[4]贺大松.汽车纵向防撞报警系统开发系统[D].成都:电子科技大学,2007.
[5]余成波,万文略,郑有根.汽车激光雷达自动防撞微机控制系统的研制[J].仪器仪表学报,2001,22(4):428-430.
[6]陈 勇,黄席樾,杨尚罡.汽车防撞预警系统的研究与发展[J].计算机仿真,2006,23(12):239-243.
[7]张大彪,于化龙.基于LabVIEW的汽车防撞报警系统的设计[J].计算机工程与应用,2008,44(21):54-56.
[8]李 华.MCS—51系列单片机实用接口技术[M].北京:北京航空航天大学出版社,2001.
[9]毛谦敏.单片机原理及应用设计[M].北京:国防工业出版社,2005.
[10]吴文琳.汽车传感器识别与检修精华[M].北京:机械工业出版社,2005.