一种毫米波脉冲压缩雷达角跟踪新方法
2010-12-03范庆辉
张 钧, 杨 健, 范庆辉
(北京遥感设备研究所,北京100854)
0 引言
毫米波脉冲压缩雷达通常发射具有大时宽带宽积的信号,如本文研究的线性调频脉冲压缩信号,这既能提高雷达探测能力又能提高雷达的距离分辨力。线性调频脉冲压缩信号是通过在脉冲持续时间内信号频率的连续性变化来获得大的信号带宽[1,2]。可见,脉冲压缩雷达可以获得较高的径向距离分辨力,当径向距离分辨率远小于目标尺寸时,可以得到目标多散射中心在雷达径向距离轴上的投影分布图(目标的一维距离像),它反映了不同目标在几何结构和物理特性上的差异,这使脉冲压缩雷达具有有效抑制目标的幅度起伏、角闪烁噪声、距离噪声的优点,这使其成为雷达研究的一个热点[3]。
毫米波脉冲压缩雷达回波信号一般具有多峰的特征,在选择跟踪点时会将其回波信号凝聚到最大点上,即选幅度最大的散射点作为跟踪点,这可抑制其它点对测角精度的影响。舰船目标雷达回波信号经脉冲压缩、M TD后形成 RD图,在RD图上舰船目标一般要跨越几个多普勒单元,可见选最大值点并不能完全使用RD图信息。随着弹目相对运动或目标姿态的改变,幅度最大点会起伏不定,这将导致测角误差偏大,而合理使用RD图信息才可减小目标的幅度起伏、角闪烁等的影响,为此本文研究了在RD图上区域加权选择跟踪点方法。
1 脉冲压缩
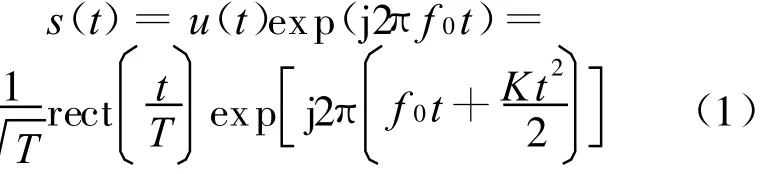
毫米波脉冲压缩雷达发射线性调频信号(或Chirp信号),它是通过对载波进行线性频率调制而得到的。线性调频矩形脉冲信号的复数表达式可以写成为[4]
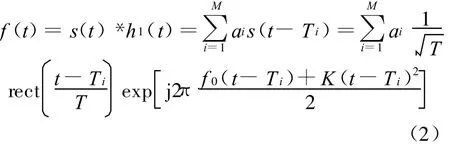
若在同一发射周期内,目标的姿态角不变,不同发射周期内目标的姿态角不同,则目标回波响应为
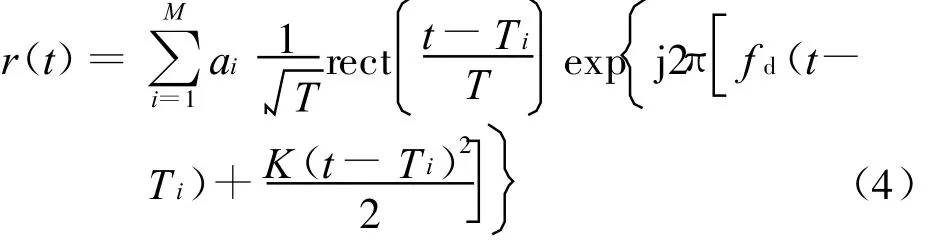
若由于目标运动引起的多普勒频率为 f d,则式(2)可表示为


对式(3)表示的回波进行混频、解调后得到基带信号:
基带回波信号经过匹配滤波后的输出为
式中:D=B T表示输入脉冲和输出脉冲的宽度比(即压缩比);H2(ω)=kRi*(ω)exp(-jωt0),(ω)为输入信号的傅里叶变换的共轭。
对M个同一距离单元的回波数据做FFT即可实现MTD,对M TD结果进行求模所形成的三维图反映了目标的距离-多普勒特性,所以此图也称为RD图。
2 单脉冲振幅和差式测角原理
振幅和差式测角原理是在同一角平面内发射两个相同但部分重叠的波束,将其接收信号进行和差处理。如果目标处于两波束的重叠方向(称为等信号方向),则两波束收到的信号强度相同,否则一个波束收到的信号强于另一波束收到的信号。
假设系统中不存在幅度或相位不平衡,天线和差器的两个输入端的信号为[1]
式中:A为雷达方程决定的常数;θ0为波束偏角;F(θ)为雷达波束方向性函数;ε为目标偏离等信号强度点的角度;φ为回波信号初始相位;k=|F′(θ0)/F(θ)|为归一化常数(角误差斜率)。

一般来说,和差信号经过A/D转换器、数字下变频、正交解调后,和差信号分解为同相和正交相两部分,角误差可表示为

其中:
可见,必须在和、差通道选择跟踪点,选择最强散射点进行跟踪即可,但舰船目标一般要跨越几个多普勒单元,选最大值点并不能完全使用RD图信息,而合理使用RD图信息才可减小目标的幅度起伏、角闪烁等的影响。
3 毫米波脉冲压缩雷达跟踪点选择
选择回波幅度最大散射点作为跟踪点,能抑制其它散射点对测角精度的影响,但如果回波幅度最大的散射中心其回波幅度随弹目的相对运动或目标姿态的改变而起伏不定,会导致测角误差偏大,甚至角跟踪失败。
毫米波脉冲压缩雷达回波信号经M TD后形成RD图,而舰船目标一般要跨越几个多普勒单元,选最大值点并不能完全使用RD图信息,而合理使用RD图信息才可减小目标的幅度起伏、角闪烁等的影响,获得稳定的角跟踪效果。
在获得了和差通道M TD结果,以和通道最大值的0.8倍作为门限,过门限的点保留,差通道选择与和通道对应的位置,使用这些点分别计算角误差,将各角误差平均加权作为输出的角误差,即为

式中:εi为过门限各点计算出的角误差;N为过门限的点数。
4 实验结果
实验数据使用某雷达照射10 km、5 km、4 km处运动的渔船所采集到的数据,由于海面波动使船发生颠簸,船的姿态变化复杂,导致录取数据的起伏和角闪烁均较强。由于舰船目标的RD图一般跨越多个多普勒单元,于是一般来说本文方法在RD图上选择的是一个区域。图1表示和通道选取的跟踪区域及其投影图,图2表示方位差通道选取的跟踪区域及其投影图,雷达与渔船的距离是5 km。
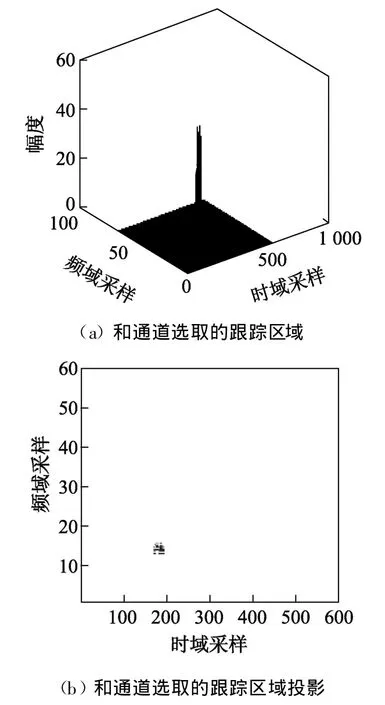
图1 和通道选取的跟踪区域及其投影
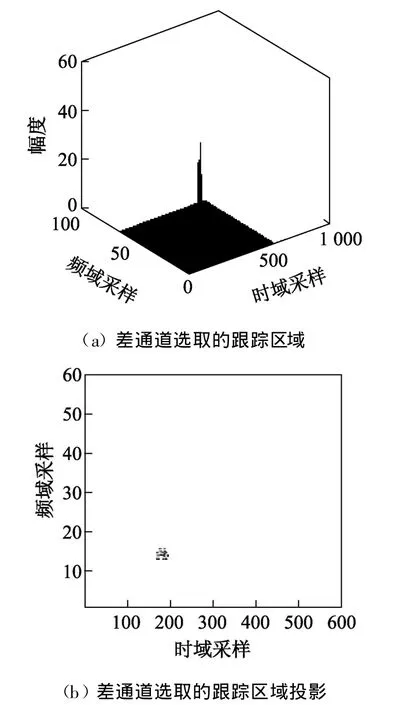
图2 方位差通道选取的跟踪区域及其投影
对比图3(b)、3(d)、3(f)可以看出,随着距离的减小最大值法计算出角误差变化范围增大,目标的幅度起伏、角闪烁对测角的影响增强。图3(f)为以上三图中角误差变化范围最大的,可见不考虑目标的幅度起伏、角闪烁对测角的影响直接使用最大值法会导致测角误差偏大。图3(a)、3(c)、3(e)与图 3(b)、3(d)、3(f)对比可见,图 3(a)、3(c)、3(e)的角误差变化范围变小,角误差也变得平滑,这说明本文计算角误差方法可有效减小目标的幅度起伏、角闪烁对测角的影响,使用此角误差对目标跟踪,可获得更加稳定的角跟踪效果。
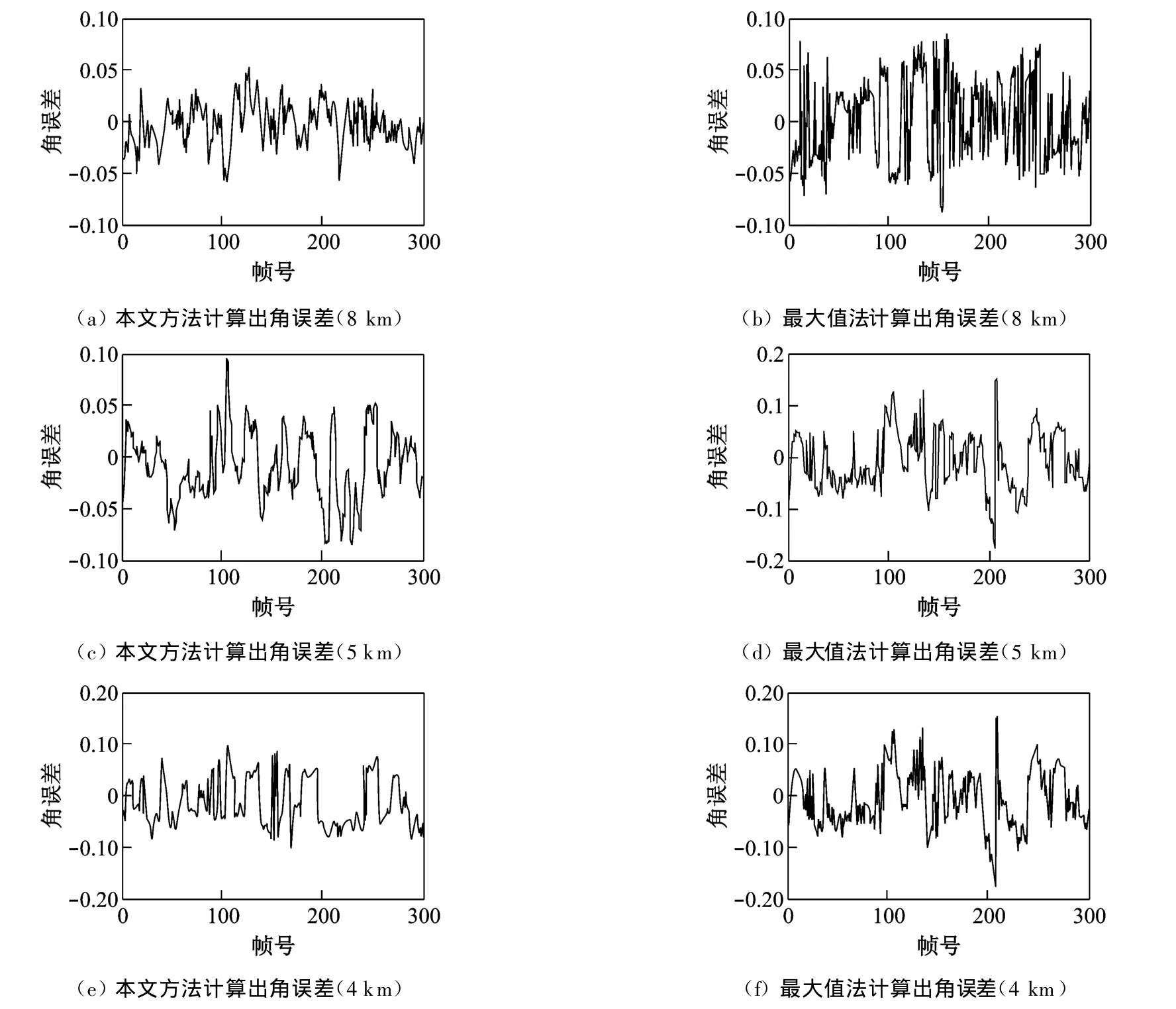
图3 不同距离两种测角方法计算的角误差
5 结论
毫米波脉冲压缩雷达回波信号经脉冲压缩、M TD后形成RD图。在RD图上舰船目标一般要跨越几个多普勒单元,选最大值点跟踪并不能完全使用 RD图信息。为此,本文研究了在 RD图上区域加权跟踪点选择方法。使用本文方法和最大值法分别处理实采数据,说明本文方法可有效减小目标的幅度起伏、角闪烁等的影响,获得稳定的角跟踪效果。
[1] 贺志毅.合成宽带毫米波雷达导引头的理论及实现[D].航天第二研究院博士学位论文,2002.
[2] 胡体玲.3 mm波段高分辨力单脉冲雷达技术研究[D].南京理工大学博士学位论文,2007.
[3] 吴顺君,程晓春,等.雷达信号处理和数据处理技术[M].北京:电子工业出版社,2008.
[4] 李保国,马君国,赵宏钟,等.毫米波单脉冲雷达高精度测角算法研究[J].系统工程与电子技术,2005,27(10):1673-1695.
[5] 苏宏艳,朱淮城.毫米波雷达高分辨抑制角闪烁试验研究[J].雷达科学与技术,2007,5(5):335-348.