基于联合仿真的汽车转弯制动ABS模糊控制研究
2010-11-22王保华周红妮
冯 樱,王保华,周红妮
(湖北汽车工业学院 汽车工程系,湖北 十堰442002)
汽车防抱死制动系统(ABS)是提高汽车制动时的方向稳定性和操纵性的主动安全装置。ABS控制方法是决定其制动性能的主要因素之一,对于具有较高非线性的汽车制动过程来说,建立精确的数学模型是很难实现的,而基于经验的控制方法又必须进行大量的实验来确定控制参数的值,才能达到理想的效果。随着仿真技术的发展,联合仿真技术已经越来越多的用于车辆控制系统,它结合了不同软件的优点,可以在车辆设计阶段对控制算法进行快速验证[1]。
目前对带ABS系统制动仿真大多集中在直道制动,通过不断对ABS的控制策略进行优化,以使车辆制动时达到理想的要求,但车辆如果在转弯时制动达不到理想的要求,使ABS失去作用,就会导致车辆制动时发生侧滑、甩尾等危险工况。本文在多体动力学软件ADAMS中建立了某车的虚拟整车模型,在Matlab/Simulink中建立的模糊控制防抱死系统,两者通过控制接口集成起来进行联合仿真,对转弯制动工况的模糊控制算法进行了验证,给实车匹配试验提供了参考,提高了开发效率。
1 整车动力性建模
ADAMS/Car是对整车及各总成进行动态仿真分析的专业化模块,具有丰富的建模功能和强大的运动学与动力学解算能力,由此可以建立规模庞大、机构复杂、系统级的仿真模型,以便对汽车进行整车性能的仿真分析。通过仿真分析,可以计算出整车和某个总成的多种特性曲线,以便对整车进行综合性能的评价和分析[2]。基于ADAMS/Car模块的汽车整车建模采用由底层向顶层的建模方法。整车模型可以被分解为前悬架系统模型、后悬架系统模型、稳定杆系统模型、车身系统模型、发动机系统模型、制动系统模型以及前后轮胎系统模型。
1.1 制动系统模型
ABS系统通过电磁阀的开闭,使制动压力经常处于增压、保压、减压的状态转换中,从而保证了车轮滑移率稳定在适当的范围内,因此制动器成为ABS系统的关键环节之一[3]。该车前、后轮制动器采用液压盘式制动器。制动器简化成制动钳和制动盘两部分,其中制动钳通过安装型输入通讯器与悬架的立柱连接,制动盘通过输入通讯器安装在车轮上。制动盘和制动钳之间以一个单作用力矩制动器定义制动力[4]。制动系统产生的制动力矩由式(1)计算得到:

式中:P—制动软管油液压强,P=FDβλ,FD为由踏板输入的制动强度,β为前后制动管路油压分配系数,λ为由踏板力到制动压强的转换系数;
μ—制动器的摩擦系数;
A—制动轮缸活塞面积;
R—制动器摩擦衬块的有效作用半径;
ξ—制动油压调节系数。
该车的ABS系统为四通道式,有4个轮速传感器,在通往4个车轮制动分泵的管路中各有1个制动压力调节器装置,控制模型中制动油压调节系数ξ的大小。为了实现与Matlab/Simulink的联合控制,在制动器模板中定义4个轮速和4个制动油压调节系数为输出和输入状态变量,并将各车轮的制动力矩与制动油压调节系数关联。
1.2 轮胎系统模型
轮胎模型利用国际上通用的 Magic Formula模型建模,它是用三角函数的组合公式拟合轮胎试验数据,用一套形式相同的公式来完整地表达轮胎的纵向力、横向力、回正力矩以及纵向力、横向力联合作用等工况,故称为“魔术公式”。该公式是基于大量的试验数据拟合而成,对车轮纵向力、侧向力等拟合精度较高。本文采用PAC 2002轮胎特性文件,PAC 2002轮胎是进行稳态转向、单或双移线、ABS制动等仿真的最佳轮胎[5]。
轮胎纵向力的表达式为

式中:D—峰值因子,表示曲线的最大值;
C—曲线形状因子;
X1—纵向力组合自变量:X1=(κ+Sh),κ 为纵向滑移率,Sh为曲线水平方向漂移;
E—曲线曲率因子,表示曲线最大值附近的形状;
B—刚度因子:B=BCD/(C×D),BCD 为纵向力零点处的纵向刚度;
SV— 曲线垂直方向漂移,SV=0。
式(2)中的计算系数值或公式在轮胎属性文件中进行定义。建好的轮胎模型通过通讯器连接到悬架系统上。
1.3 车身系统模型
车身系统建立刚性底盘模板的基础上,整车所有的系统直接或间接与之连接。刚性底盘上可定义空气阻力,由于整车质心位置直接影响前后轴荷分配,对制动性能有很大影响,建模时要对质心位置给予准确定义,应在刚性底盘模板上添加1个硬点(hardpoint)和标记(marker)作为自定义整车质心和惯量标记。为了在控制时获取实际车速信号,在车身模块中定义车身速度为输出状态变量。
1.4 整车模型的建立
各子系统建立完成后,与整车测试台(MDI_SD I_TESTRIG)组装在一起,得到整车多体动力学仿真模型,如图1所示(隐藏了发动机和车身几何)。汽车其它系统为麦弗逊前独立悬架、多连杆式后独立悬架、齿轮齿条式转向系统、动力传动系为发动机前置前驱。该整车模型由53个部件组成,模型的自由度为121。整车参数见表1。

图1 整车模型

表1 整车主要参数
1.5 联合控制的输入、输出
利用ADAMS/Controls模块,首先将上述建模过程中所定义的4个轮速和车身速度状态变量由定义为ADAMS模型的输出变量,4个车轮制动器油压调节系数输入变量定义为ADAMS模型的输入控制变量。然后,生成Matlab对象/过程模型,即将ADAMS中的整车模型以及仿真运行工况以.m文件的形式转化成Matlab可调用的程序。
2 ABS控制系统设计
2.1 滑移率的计算
制动时为了获得最大的地面制动力,同时汽车又具有良好的制动方向稳定性,要求ABS系统能将车轮的滑移率控制在15%~20%之间。滑移率的定义为

式中:v—车速;
ω—车轮角速度;
r—车轮滚动半径。
实车ABS系统控制所需的式(3)中车轮角速度可由轮速传感器较为准确地计算得到,而车身速度不能直接得到,需间接计算估计确定,故被称为参考车速。目前,ABS系统参考车速的计算方法可分为两大类[6]:一是只使用车轮角速度传感器;二是除了车轮角速度传感器外,还使用测量车身加速度或其它传感器。单利用轮速信号确定参考车速的主要方法有最大轮速法、斜率法、综合法、基于车辆制动力学模型的参考车速法、递推法、自适应非线性滤波法。采用多种传感器相结合确定参考车速的方法有基于模糊逻辑规则的卡尔曼滤波法、卡尔曼滤波和滚动时域估计(MHE)结合法、扩展卡尔曼滤波法等。
由于在ADAMS已建立了精确的整车动力性模型,且定义了车身的合成速度作为ADAMS模型的输出参数之一,因此,把ABS控制系统中的参考车速取ADAMS模型输出的车身速度。
2.2 模糊控制器的开发
为改善车辆的高速转弯制动性能,本文采用基于滑移率的模糊控制。通过控制4个车轮制动器油压调节系数,改变各车轮的制动力矩,使制动过程中车轮的滑移率保持在最佳滑移率附近,保证汽车在高速转弯制动时即能获得较大的纵向制动力,制动距离最短,同时又有较大的侧向附着系数,使汽车沿轨道的偏离量最小。
模糊控制系统的输入量为滑移率误差E和滑移率误差的变化率EC,系统的输出量制动油压调节系数ξ。设定最佳滑移率si为0.2,而车轮的滑移率变化范围为[0,1],则滑移率误差 E(s-si)变化范围为[-0.2,0.8],通过反复仿真确定滑移率误差的变化率EC为[-20,20],油压调节系数ξ的变化范围为[0.4,0.8]。 将输入、输出变量进行模糊化处理。滑移率误差E语言变量分为6个子项:负大(NB)、负小(NS)、零(Z)、正小(PS)、正中(PM)、正大(PB),每个子项的隶属度函数为trimf函数,如图2所示。滑移率误差的变化率EC语言变量分为5个子项:负大(NB)、负小(NS)、零(Z)、正小(PS)、正大(PB),每个子项的隶属度函数为gaussmf函数,如图3所示。油压调节系数ξ语言变量分为7个子项:快减(FB)、中减(FN)、慢减(FS)、零(Z)、慢升(RS)、中升(RM)、快升(RB),每个子项的隶属度函数为trimf函数,如图4所示。
根据输入与输出的模糊子集关系,可建立模糊控制规则,如表2所示。

图2 滑移率误差E隶属度

图3 滑移率误差变化率EC隶属度

图4 油压调节系数ξ隶属度

表2 模糊控制规则表
模糊逻辑推理方式采用Mamdani极大极小推理。如图5所示为利用Matlab模糊控制工具箱设计完成的30条模糊控制规则三维图。从图5中可以看出,模糊控制规则呈现非线性特征,E或EC接近0时,曲面变化较大;E或EC远离0时,曲面变化较小。这一特征与建立模糊控制规则的思想相符,即误差接近0时,对应的规则多些,保证精细控制;误差远离0时,对应的规则少些,以保证控制的灵敏度。

图5 模糊控制规则三维图
2.3 基于Matlab的控制系统
在Matlab中调用由 ADAMS/Controls模块中生成的整车动力学模型Adams sub,利用Matlab/Simulink仿真平台建立如图6所示的ABS模糊控制系统联合仿真模型。
图6中Adams sub模块包含了所建立的整车多刚体动力学模型信息,输出变量为车身速度和4个车轮的角速度。Simulink中的控制模型对其输入信号处理后,得到各个车轮的滑移率,将其与理想滑移率比较后,得到滑移率误差及滑移率误差变化率,并将它们作为模糊控制器的输入参数,进行模糊运算后得到各个车轮的油压调节系数,由Simulink输出去控制ADAMS整车模型。

图6 ABS模糊控制系统仿真模型
3 ABS模糊控制系统仿真
本文对整车及控制模型进行转弯制动联合仿真试验,路面为沥青路面(附着系数为0.8),汽车做一个半径为50 m、初始车速为60 km·h-1且方向盘锁定的匀速圆周运动,1s后,分离离合器,制动踏板踩到底,ABS开始工作。为了反映出ABS系统模糊控制的优势,将未装ABS的汽车与装有ABS系统采用逻辑门控制的汽车和采用模糊控制的汽车进行了对比仿真计算。制动仿真结果曲线见图7~8。
图7a为汽车ABS系统采用逻辑门控制、模糊控制和未装ABS的常规制动时所行驶轨迹与R为50 m圆轨迹的对比曲线。由图可见常规制动的制动距离最长,轨迹偏离量最大,ABS系统采用逻辑门控制的汽车无论是制动距离还是轨迹偏离量都明显下降,而ABS系统采用模糊控制的汽车制动距离最短,轨迹偏离量最小。
图7b为汽车ABS系统采用逻辑门控制、模糊控制和未装ABS的常规制动时车速与时间关系曲线。由图7b可见常规制动的汽车制动时速度下降最慢,制动时间最长,采用逻辑门控制的汽车次之,而ABS系统采用模糊控制的汽车速度下降最快,制动时间最短。当车速低于5 km·h-1时,ABS停止工作,仿真结束。
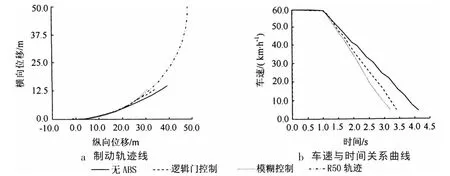
图7 不同制动控制的行驶轨迹和车速、时间关系曲线图
图8分别为ABS系统采用逻辑门控制、模糊控制和未装ABS的常规制动时左前、左后、右前、右后车轮滑移率与时间关系曲线。由图8可见常规制动的汽车在制动踏板踩死后时所有车轮迅速抱死,滑移率为100%。采用逻辑门控制和模糊控制的ABS系统汽车在制动踏板踩死后均能通过制动液压的调节,有效地控制车轮的滑移率。在逻辑门控制下,当车速较低时,滑移率在最佳滑移率附近大范围的振荡,致使制动距离和时间延长;而在模糊控制下,滑移率能迅速收敛,4个车轮始终没有抱死现象。

图8 车轮滑移率与时间关系曲线图
4 结 论
本文基于ADMAS和Matlab联合仿真技术,对汽车转弯制动下的模糊控制规律进行了仿真研究。由仿真结果可以看出运用ABS模糊控制方法的整车在汽车高速转弯制动中能达到较好的制动效果,与逻辑门控制的ABS相比,在滑移率控制的收敛性要好,制动距离明显缩短,轨迹偏离量很小。
[1] 沈 俊,宋 健.基于ADAMS和Simulink联合仿真的ABS 控制算法研究[J].系统仿真学报,2007(3):1141-1143.
[2] 陈立平,张云清,任卫群,等.机械系统动力学分析及ADAMS应用教程[M].北京:清华大学出版社,2005.
[3] 张云清,熊小阳,陈 伟,等.基于 ADAMS和 MATLAB的ABS模糊控制仿真研究 [J].公路交通科技,2007(3):148-153.
[4] 陈 军.MSC.ADAMS技术与工程分析实例[M].北京:中国水利出版社,2008.
[5] ADAMS2007R3/help,ADAMS/Tire[K].MSCSoftware,2007.
[6] 王仁广,刘昭度,齐志权,等.汽车ABS参考车速的确定方法[J].农机化研究,2006(3):198-199.
