基于ADAMS的车辆极限越障性能研究
2010-11-22屠德新魏道高蒋艮生
屠德新,魏道高,蒋艮生,胡 维
(合肥工业大学 机械与汽车工程学院,安徽 合肥230009)
车辆越障性能是车辆通过性中的几何通过性,是指车辆克服几何障碍物如垂直台阶、壕沟、弹坑等障碍物的能力[1]。四桥悬架越野车,有较好的行驶稳定性、乘坐舒适性及通过性,因而有广泛应用前景。国内在这方面研究和国外相比还只是在初级阶段,只有在军工企业上才有所涉及。通过性测试一般为试验场的实车测试,由于样车照价昂贵,同时地理及开发周期等因素的限制给车辆研发单位带来诸多不便。作者通过ADAMS软件建立四桥独立悬架虚拟样机的模型,并通过Simulink的联合仿真,得出的不同附着系数下汽车的越障高度,为越野车的通过性进行深层次的设计和优化提供了一种新手段。
1 虚拟样机模型的创建
仿真模型的创建,是一切仿真的基础。模型的好坏直接影响到仿真的精度与可信度。汽车包括车身、发动机、行走系、转向系、制动系、传动系和辅助设备,是一个复杂的机械系统,如果按照车辆的真实构造进行建模,工作量非常大。因此根据研究的目的,在建模时对车辆的结构进行了适当的抽象、简化,对建立的整车动力学模型作出如下假设:
1)主要考虑车辆越障性能性能,因此对影响这些研究性能的非主要因素如动力总成进行简化,直接在车动轮上加驱动来实现其动力性能要求。
2)除弹性元件外,其余零件均认为是刚体,在仿真分析过程中不考虑它们的变形。
3) 运动副内的摩擦力不计[2]。
ADAMS与Matlab联合仿真需要经过以下几个步骤:在ADAMS/view界面里建立汽车模型,包括车轮、悬架及车体。第1、2桥采用双横臂式悬架,第3、4桥采用单横臂独立悬架,同时设定修改部件质量,取车轮半径为450 mm,车体质量为16000 kg。第1桥与第2桥的距离为1420 mm,第1桥与第3桥的距离为2720 mm,第1桥与第4桥的距离为4260 mm。 汽车模型如图 1所示[3]。

图1 整车虚拟样机模型
2 台阶路面障碍的建立
由于要得出不同的附着系数下汽车的越障高度,这就要求台阶的高度是可变的,台阶的关键点坐标设置成设计变量就实现的台阶的参数化,从而实现了台阶高度是可变的。构建好的系统模型整体图如图2所示。
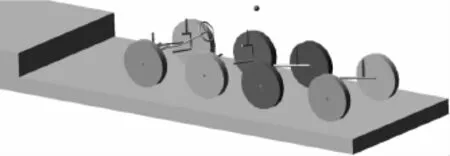
图2 系统仿真界面图
3 ADAMS与Matlab/Simulink联合仿真设计流程
3.1 定义ADAMS的输入和输出
对小车越障运动的分析通常要作某些简化,本文假定,车轮为刚体,车体质量简化为汽车质心一点,没有弹性力的作用,对台阶状障碍进行越障分析。首先创建状态变量,创建并设计motion,创建对车轮旋转运动的约束,选取ADAMS中的velocity选项,对Function(time)栏的运动函数与状态变量联系起来。创建variable-box对话框,对其布局、按钮、文本框进行调整。在variable-box对话框中输入台阶高度及路面的附着系数,利用交互式仿真,即可以观察到小车在不同条件下的爬跃台阶的实际效果[4],如图 3 所示。
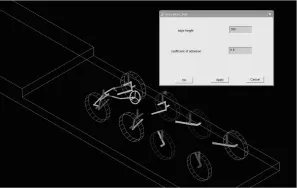
图3 不同条件下的爬跃台阶示意图
3.2 Matlab的综合交互仿真
ADAMS的输入输出与Simulink设计的控制系统接口相对应,ADAMS的输入相当于控制系统的输出,ADAMS的输出相当于系统的测量值[5],也就是控制系统的输入。建立控制系统结构图,将ADAMS建立的虚拟模型与Matlab建立的控制系统通过结合起来,形成一个闭环系统。加载ADAMS/Control模块,创建输入变量,即motion。输出变量,即height。在control package列表选择Matlab选项,即生成适用于Matlab的m文件[6]。通过设计输出的数据在Matlab里面建立汽车模糊控制系统结构框架,同时建立联合仿真模型如图4所示。其中,通过Adams_sub子模块把Simulink中的控制系统模型与ADAMS中的机械系统仿真模型连接起来了。双击模型中的Adams_sub子模块,可以看到其内部结构图(略),可以看到输入为motion,输出为height,与ADAMS/Control定义的输入输出一一对应。完成了上面的设置以后,就可通过Mechanical Dynamics子模块参数设置对话框,对其相应的参数进行设置,即完成了联合仿真模型的建立。
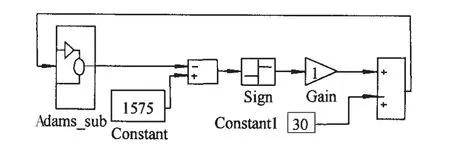
图4 系统联合仿真模型图
3.3 实验结果
设置小车车轮角速度为30(°)/s,运行时间15 s,步长50,通过联合仿真得出在不同附着系数下小车能爬上的最大高度,并与文献[7]中的理论极限越障高度进行对比。
由仿真结果图5看出,在附着系数比较小的时候,虚拟样机模型越障高度和理论越障高度比较接近,但是在附着系数比较大时,和文献[7]中理论越障高度有了一定的出入。误差分析:1)忽略了轮胎弹性和悬架阻尼,将4桥悬架作为等刚度;2)虚拟样机模型有很多具体参数和实际车辆有差别,有待完善;3)文献[7]中物理模型的建立,在仿真检验过程中发现有待完善。
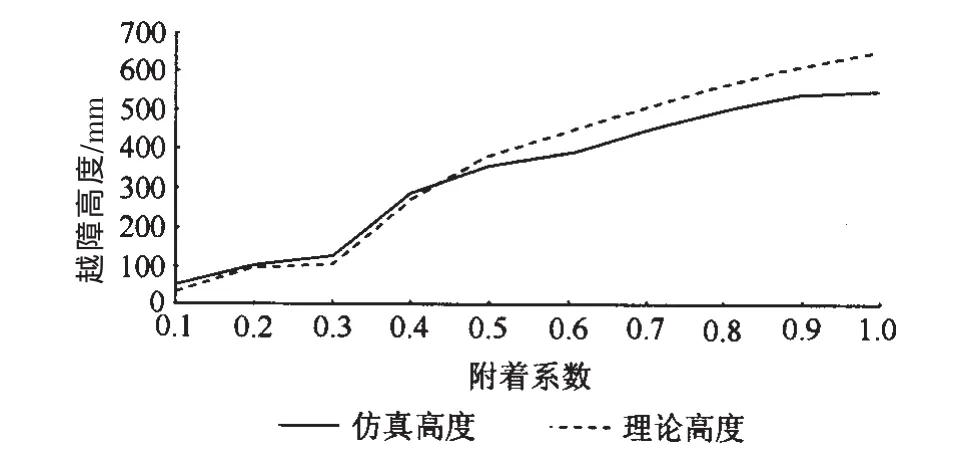
图5 不同附着系数下越障高度的对比图
4 小 结
用ADAMS建立了8×8独立悬架车辆越障的虚拟样机模型,利用ADAMS和Simulink软件成功地对小车跨越障碍系统进行了控制仿真分析。而且通过ADAMS软件建立的虚拟模型能很好地接近实际的物理模型,为以后的物理样机试验提供了更为可靠的依据.应用建立的虚拟样机模型与实验对比,有较好的一致性,表明该模型对4桥独立车辆越障高度有较好预测性,在虚拟样机里可以方便对越障高度影响因素逐一调试,优化后可使车辆越障性能得到最大的提升。
[1] Bekker M G.Theory of land locomotion[M].Ann Arbor:The University of Michigan Press,1956.
[2] 李 军.ADAMS实例教程[M].北京:北京理工大学出版社,2002.
[3] Bekker MG.Introduction to Terrain -Vehicle System[M].Ann Arbor:The University of Michigan Press,1969.
[4] 郑 帆,余 江,裴以建,等.基于 ADAMS与 MATLAB的车辆跨障综合交互仿真 [J].云南大学学报,2007,29:271-274.
[5] 李增刚.ADAMS入门详解与实例[M].北京:国防工业出版社,2006.
[6] 尹华兵,范华春,魏来生.基于虚拟样机技术的某车辆性能仿真研究[J].系统仿真学报,2004(10):1712175:2289-2293.
[7]魏道高,王霄锋,金达锋,等.四桥独立悬架车辆越障性能计算研究[J].汽车工程,2007,29(9):816-818.
