非线性永磁同步电动机约束预测控制
2010-11-20王永宾
林 辉,王永宾
(西北工业大学,陕西西安710129)
0 引 言
目前,在永磁同步电动机(以下简称PMSM)伺服系统中,主要采用矢量控制、直接转矩控制策略。上述策略在处理系统中的约束条件(主要是输入饱和,输出限幅)时,常采用传统的抗饱和方法,即设计独立的饱和补偿器来减小由约束条件导致的系统性能恶化,这不仅增加了控制系统设计的复杂性,而且通常仅适用于某一类情况[1-2]。
线性预测控制(以下简称LMPC)是20世纪70~80年代发展起来的一种高级控制方法,其可以直接有效地处理系统中包含的输入、状态、输出约束条件[3]。不同于传统抗饱和方法,LMPC将求解最优控制率问题构造为包含约束条件的优化问题,采用线性规划方法系统地设计预测控制器。然而,对于PMSM这样的非线性被控对象,需采用非线性预测控制(以下简称NMPC)方法。由于非线性规划是非凸规划,迭代算法有可能收敛于局部极小点,而且计算量巨大,这使得NMPC无法应用于实时系统[4-5]。反馈线性化(以下简称FBL)是一种重要的非线性控制方法。该方法利用非线性状态反馈和微分同胚坐标变换将非线性模型转换为线性模型,当系统不存在零动态问题时,结合线性系统控制理论,可以很容易得到非线性系统控制率[6]。
本文中,针对带有输入约束条件的PMSM伺服系统,提出FBL与LMPC联合控制方法;对设计过程中存在的约束条件映射问题,提出一改进方法。通过仿真实验,将FBL-LMPC与FBL-极点配置方法的控制效果进行比较。
1 线性预测控制原理
下面以单输入/单输出系统为例,对预测控制原理进行说明,对于多输入/多输出系统,具有类似的结论。系统状态方程如下:

式中:u(k)、x(k)、y(k)分别为输入(控制)、状态和输出变量;A、B、C为相应维数的系数矩阵。假设在时刻k,通过测量状态变量x(k)获得系统的当前信息,控制变量预测序列表示为:

式中:Nu为控制时域;u(k+j|k)表示在k时刻预测的未来k+j时刻输入变量值,j=0,1,…,Nu-1;针对其它变量,该表示法具有相同含义。根据当前状态变量x(k)和式(1),可以得到输出变量预测序列:
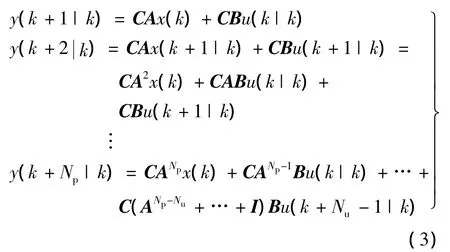
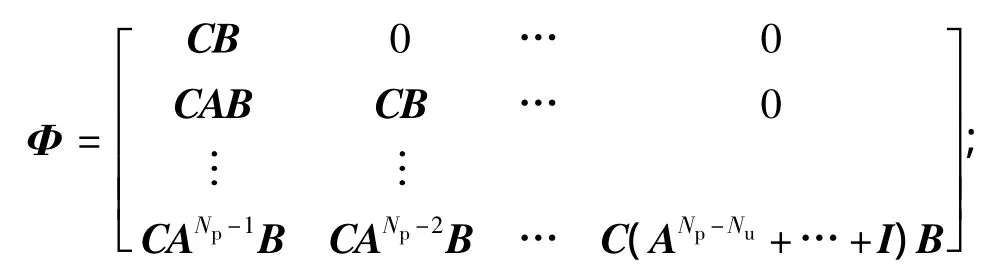
式中:Np为预测时域,Nu≤Np;I为单位矩阵;当Nu≤j≤Np时为了便于分析,将式(3)重新写成矩阵形式:

式中:F=[CA,CA2,…,CANp]T;
Y=[y(k+1|k),y(k+2|k),…,y(k+Np|k)]T。假定预测时域内参考信号为一常数,即:为k时刻的参考信号。LMPC的控制目标是在预测时域内求解最优控制预测序列u(k+j)|k),使预测输出尽可能接近参考信号。因此,定义二次型指标函数:

式中,R为控制预测序列权矩阵。将式(4)代入式(5)中,二次型指标函数可重新写为:

在无约束条件下,可以通过对指标函数求导求解最优控制预测序列,从而得到:

得到最优控制预测序列U后,根据滚动优化策略,系统仅将u(k)=u(k|k)作为实际控制变量作用于系统,其它时刻预测控制变量将被抛弃。在时刻k+1,重新测量系统最新状态信息x(k+1),并重复上述优化过程。
在实际控制系统中,为应对因为装置的非线性和干扰等因素导致的模型失配,必须引入反馈校正。其方法是测出当前装置的输出与模型输出之差,然后从参考轨迹中减去这一偏差,得到新的控制序列:

式中:l表示一个矢量由于k+1,…,k+Np时刻还未到来,所以上述时刻真实输出值是未知的,这里假设当前(k时刻)的偏差将连续以相同水平进入未来时刻[7],如式(8)。
上述是无约束LMPC优化求解过程,在系统有输入和输出约束条件时:

由指标函数式(6)和约束条件式(1)、式(9)共同构成新的控制序列寻优问题。式(6)中,矩阵ΦTΦ+R为正定矩阵,因为指标函数J表示为二次型,而约束表示为线性不等式形式,新的寻优问题变成标准的二次规划问题。通过积极域法或内点法,可以迅速求解出二次规划问题的最优控制变量数值解序列。结合上面提到的滚动优化策略和反馈校正,构成了约束线性预测控制。
2 PMSM反馈线性化
本文选择隐极PMSM,忽略寄生磁阻转矩;在同步旋转坐标系(dq)中,使d轴与转子磁链重合,得到状态方程:

式中:id、iq、ud和uq分别为d、q轴电枢电流、电压;ωr为转子角速度;Rs为电枢电阻;L为电枢电感;Ψr为转子磁链;B为摩擦系数;J为总转动惯量;p为极对数;Tl为负载转矩。系统状态变量和控制变量分别为x=[idiqωr]T,u=[uduq]T,选择直轴电流和转速作为输出变量,将式(10)写为仿射非线性形式:
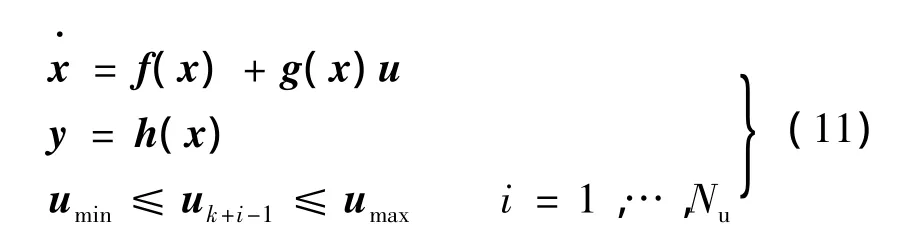
根据微分几何理论[8-9],首先确定式(11)的相对阶,对输出变量h1(x)、h2(x)分别求李导数:
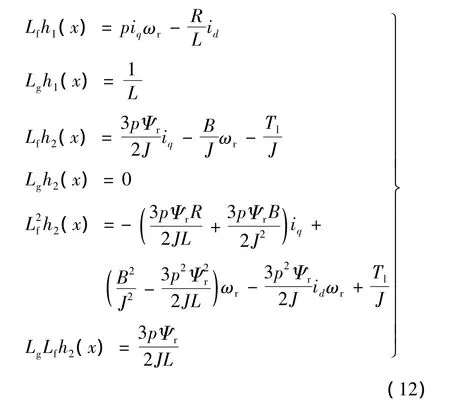
式中:Lgh1(x)≠0,LgLfh2(x)≠0可知系统相对阶r=3,满足反馈线性化条件,并且不存在零动态问题[10]。因此,可以通过微分同胚坐标变换:

和非线性状态反馈:


3 约束条件映射
得到式(15)后,对式(11)中的约束条件作相应的映射。因为该映射是基于式(14)非线性映射,这使得原线性不等式约束条件变换成非线性、与状态变量相关的不等式约束条件,必须在每一采样时刻进行映射变换。式(14)的映射反变换可写为:

在时刻k,为了得到虚拟输入变量v的约束条件,需求解下列优化问题:

并服从于约束条件:

很显然,求解虚拟输入变量约束条件需要输入预测序列u(k+j|k)和状态预测序列x(k+j|k);而输入和状态预测序列需求解线性预测控制问题后才可获得;进而在新系统约束条件未知的情况下,线性预测控制问题无法求解。因此,式(17)、式(18)所表述的优化问题,只有通过非线性规划或数值迭代方法求解。这样一来,将严重削弱由FBL-LMPC所带来的减小计算量的优势,影响系统实时性。
因为仅k时刻约束条件对系统起作用,对于虚拟输入变量约束vmin(k+j|k)和vmax(k+j|k),j≥1可以进行近似计算。文献[2]与文献[11]分别提出了常值约束和可变约束方法获得近似虚拟输入变量约束条件。上述两种方法克服了NMPC计算量大的缺点,但是由于没有考虑系统误差对约束条件映射的影响,造成求解的优化输入预测序列过于保守或激进。
由式(8)可得:

即系统误差可以通过在输入变量上加一附加项来补偿。假设LMPC在时刻k-1产生输入虚拟序列:
V(k-1|k-1)=[v(k-1|k-1),v(k|k-1),…,v
(k+Np-2|k-1)]T。第一输入变量v(k-1|k-1)将被作用于系统,剩余输入变量作为时刻k的近似预测值:
其中,直接扩展第Np-1个输入变量得到第Np个输入变量,对上式进行反馈校正:

这里仍假设当前(k时刻)的偏差将连续以相同水平进入未来时刻。当前状态变量测量值x(k)通过式(13)计算出线性化模型状态变量z(k),然后根据式(15)和式(21)产生线性化模型近似状态预测序列:

式中:z(k|k-1)=z(k)。利用式(22)以及式(13)的反变换可以计算得到式(11)的近似状态预测序列:

对于非线性优化问题式(17)、式(18),用x(k+j|k-1)代替x(k+j|k)后,优化问题转化为包含u(k+j|k-1)的线性优化问题,避免求解原NMPC问题。在下一采用时刻,利用输入变量序列V(k|k)和测量状态x(k+1)重复上述过程。
该方法一个显著特点是,在k时刻作用于系统的输入变量v(k)所对应的约束条件vmin(k|k-1),vmax(k|k-1)是采用真实状态测量值x(k)计算得到的,所以完全满足实际约束条件。与上述两种方法相比,通过改进方法得到的约束条件在整个预测时域Np上,与实际约束条件更加一致,有利于提高系统性能和系统鲁棒性。
4 仿真实验分析
本文中,控制目标是使输出转速ωr快速跟踪给定转速,同时,为了实现磁场定向矢量变换控制,使d轴电流为零。仅对输入变量设置约束条件:


表1 主要参数
对于FBL-LMPC方法,根据上述内容,可以定义指标函数:
式中:Wω、Wd是各项对应权系数,并设置为Wω=27,Wd=26。根据第三节所述内容,将式(24)映射至线性坐标空间。由此,可将原NMPC问题转换为LMPC问题,借助Matlab提供的二次规划解算器,可以得到虚拟输入变量v=[v1v2]T,再通过式(14)进行反变换,可以得到实际输入变量u=[uduq]T。FBL-LMPC闭环控制框图如图1所示,线性化模型部分实现模型线性化和约束映射功能;线性预测控制器则根据线性化模型进行设计。

图1 FBL-LMPC闭环控制框图
对于FBL-极点配置方法,根据极点配置定理,通过状态反馈配置系统式(15)的3个极点(特征值),状态反馈矩阵为状态反馈矩阵与3个特征值的推导关系为a10=-λ1,a21=λ2λ3,a22=-(λ2+λ3),并确定反馈系数为a10=494,a21=123.6,a22=15.72。
图3中,FBL-极点配置方法为了消除系统非线性影响,导致控制变量峰值非常大,达到1 000 V。在无约束的情况下,系统根本无法实现,这也是该方法的一个缺点。图2中,无约束时,系统动态响应速度很快,超调量较小,可以满足系统的要求;在对输入采用抗饱和方法限幅后,系统出现严重滞后,在达到稳态值后,出现小幅振荡现象,过渡时间延长。

图2 FBL-极点配置控制速度响应波形

图3 FBL-极点配置控制uq响应波形
图5中,在无约束时,与上一方法比较,控制变量峰值显著减小;图4中,速度响应速度很快,而且没有超调。在有约束时,转速上升阶段响应有一滞后,但仍在0.36 s达到稳态值,响应时间与无约束情况基本一样,而且同样没有超调。这一结果验证了LMPC对约束控制的优越性和有效性。

图4 FBL-LMPC控制速度响应波形

图5 FBL-LMPC控制uq响应波形
图6、图7中,两种方法均使id趋向于零,然而,从减小焦耳损耗的角度来看,FBL-LMPC方法的控制效果更好。

图6 FBL-LMPC控制id响应波形

图7 FBL-极点配置控制id响应波形
5 结 语
FBL方法是解决非线性问题的一种有效方法,LMPC则可以系统地将约束条件包含在控制器设计中,充分利用两者的优势,采用FBL-LMPC的联合控制方法设计带有约束条件的PMSM伺服系统,同时解决了系统非线性和约束控制给控制器设计带来的困难。仿真实验结果表明了该方法可改善系统静动态性能,提高系统实时性和鲁棒性。
[1] Astrom K J,Rundqwist L.Integrator Windup and How to Avoid It[C]//American Control Conference.1989:1693-1698.
[2] Kurtz R J,Henson M A.Feedback linearizing control of discrete-time nonlinear systems with constraints[C]//System Theory 1996 Proceedings of the Twenty-Eighth South eastern Symposium.1996:23-27.
[3] Zhao Y B,Liu G P,Rees D.Improved predictive control approach to networked control systems[J].Control Theory&Applications,IET.2008,2(8):675-681.
[4] Wagh S R,Kamath A K,Singh N M.Non-linear Model Predictive Control for improving transient stability of power system using TCSC controller[C]//Asian Control Conference.2009:1627-1632.
[5] Pin G,Raimondo D M,Magni L,et al.Robust Model Predictive Control of Nonlinear Systems With Bounded and State-Dependent Uncertainties[J].IEEE Transactions on Automatic Control,2009,54(7):1681-1687.
[6] Franco A L D,Bourles H,De Pieri E R,et al.Robust nonlinear control associating robust feedback linearization and H∞control[J].IEEE Transactions on Automatic Control,2006,51(7):1200-1207.
[7] 钱积新,赵均,徐祖华.预测控制[M].北京:化学工业出版社,2007.
[8] Chiasson J.Dynamic feedback linearization of the induction motor[J].IEEE Transactions on Automatic Control,1993,38(10):1588-1594.
[9] Schoukens J,Nemeth J G,Vandersteen G,et al.Linearization of nonlinear dynamic systems[J].IEEE Transactions on Instrumentation and Measurement,2004,53(4):1245-1248.
[10] Freidovich L B,Khalil H K.Performance Recovery of Feedback-Linearization-Based Designs[J].IEEE Transactions on Automatic Control,2008,53(10):2324-2334.
[11] Kurtz M J,Guang-Yan Z,Henson M A.Constrained output feedback control of a multivariable polymerization reactor[J].IEEE Transactions on Control Systems Technology,2000,8(1):87-97.
