基于APDL的圆筒型直线步进电动机电磁场分析
2010-11-20严兰舟杨文焕
严兰舟,杨文焕
(上海理工大学,上海200093)
0 引 言
ANSYS软件是集结构、热、流体、电磁场、声场和耦合场分析于一体的大型通用有限元分析软件。ANSYS标准分析过程包括:建立分析模型并施加边界条件、求解计算和结果分析三个步骤。ANSYS软件提供两种工作模式,即人机交互(GUI方式)和命令流输入方式(BATCH方式)。对于复杂模型,人们往往倾向使用命令流方式进行分析和计算,即ANSYS参数化设计语言(以下简称APDL)。APDL是一门可用来自动完成有限元常规分析操作或通过参数化变量方式建立分析模型的脚步语言,该语言可自动完成有限元分析,即程序的输入可根据指定的函数、变量以及选用的分析类型来做决定,是完成优化设计和自适应网格的最主要的基础。它能够有效利用第一次分析时的LOG文件,对其进行修改,用户就可以完成任意多次分析,从而大大减少了修改模型后重新分析所需时间。APDL允许复杂的数据输入,扩展了传统有限元分析的范围,并扩展了更高级运算包括灵敏度研究、零件库参数化建模、设计修改和设计优化等。
本文应用ANSYS参数化设计语言对圆筒型直线步进电动机进行电磁场分析。
1 电机结构分析
圆筒型直线步进电动机剖面图如图1所示。
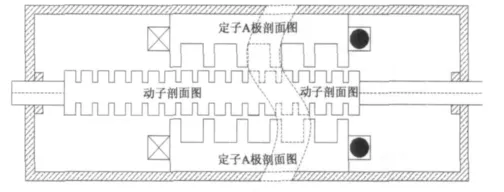
图1 电机剖面图
图1为电机定子、动子齿相互错开的情况,给电机A极通电,在电磁力的作用下,动子将朝定子齿、动子齿重合的方向(往右)运动,直到定动子齿重合为止;当定子A极齿与转子齿重合后,定子B极齿与动子齿又将错开,此时转向给B通电,动子依旧沿定、动子齿重合方向运动,直到定动子齿重合为止;当定子B极齿与动子齿重合后,定子C极齿与动子齿又将错开;此时转向给C通电,动子依旧沿定、动子齿重合方向运动,直到定动子齿重合为止。此时一个通电周期结束。如果继续给A极通电,整个运动过程重新进入下一个周期。电机定子三维图如图2所示。
从图2可以看出,本文所涉及的电机定子、齿部的排列比较特殊。定子齿是沿着极靴表面成轴向一齿一槽依次排列,齿宽要小于槽宽。定子段每个极都是自成一体,成单段式的。
该电机的动子三维图如图3所示。

图2 定子三维侧视图

图3 动子三维侧视图
从图3可以看出,本文所涉及的电机动子、齿部的排列是沿着动子轴表面成轴向一齿一槽依次排列,齿宽要大于槽宽。
2 标量磁位(MAG)法的基本原理
标量磁位法是3D静态分析的首选方法,本文采用标量磁位法对该电机进行三维仿真分析。标量磁位法将电流源以基元的方式单独处理,无需为电流源建立模型和划分有原因网格,这样大大简化了模型的复杂程度。由于使用标量磁位法进行分析求解所需磁力线平行边界条件自然满足,因此,在求解模型时无需为其添加边界条件。
标量磁位法又分为三种不同的求解方法:简化标势法(RSP)、差分标势法(DSP)和通用标势法(GSP)。
下面介绍DSP法的计算原理。
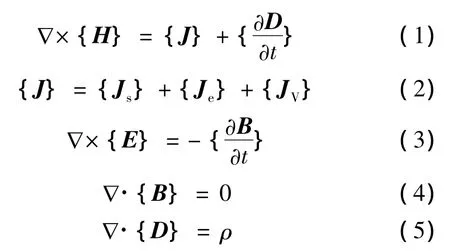
ANSYS对电磁场仿真计算需要满足麦克斯韦方程组:
为满足麦克斯韦方程组,还需要补充描述电磁物质属性的本构关系,如下:

式中:▽×为旋度算子;▽·为散度算子;{H}为磁场强度;{J}为总电流密度矢量;{Js}为外施激励源电流密度矢量;{Je}为感应涡流密度矢量;{JV}为速度电流密度矢量;{D}为电位移矢量;t为时间;{E}为电场强度矢量;{B}为磁感应强度矢量;ρ为体电荷密度;式(6)为不饱和永磁体的可饱和物质本构关系;式(7)为考虑永磁体时本构关系;[μ]磁导率矩阵;μ0为自由空间的磁导率;{M0}为本征剩余磁化矢量。
电磁场求解区域如图4所示。
静态场意味着场量不随时间变化。麦克斯韦方程变为:

图4 电磁场求解区域

区域Ω0和Ω1中的场量满足式(8)、式(9)以及式(7),由此可得:

其中:φg为全标量位;{Hg}为初始值或“猜测”值。一般来说,{Hg}总是包括满足安培定律的毕-沙磁场{HS},而{HS}是源电流{JS}的函数,由积分计算可得:
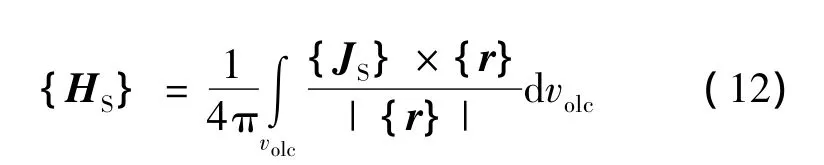
其中:{r}为源点到场点的位置矢量;volc为电流源的体积。
DSP法分两步求解。
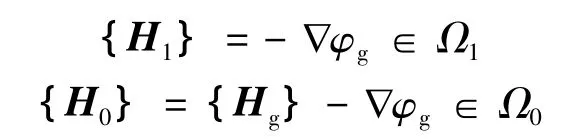
第一步,将下式代入式(10)、式(11):

约束条件:{n}×{Hg}={0}∈S1
上述边界条件当铁的磁导率为无限大时是满足的。不考虑磁饱和和永磁体的影响,这一步使铁区内的磁场为零,即{H1}={0}∈Ω1;空气区的磁场{H0}={HS}-▽φg∈Ω0。
第二步,使用第一步计算出的磁场作为初值代入式(10)、式(11),这一步考虑磁饱和和永磁体的影响,得到如下磁场:
由此得到最终结果。
使用DSP法求解时满足方程{JS}≠0以及[μ]≠[μ0],即当μ→∞时使用GSP法求解时满足方程使用RSP法求解时满足方程[μ]=[μ0]以及{JS}=0。
综上所述,意味着DSP法适用于单连通铁区(含气隙情况);GSP法适用于多连通铁区(不含气隙情况);RSP法适用于模型中不含铁区,或有铁区但无电流源的情况;若不适用RSP法,则选择DSP法或GSP法。
3 基于DSP法的三维有限元模型仿真
3.1 圆筒型直线步进电动机三维静态磁场分析
首先,用ANSYS有限元仿真软件对该电机某一段——两齿一槽进行二维电磁场仿真,观察该电机的磁感线分布,得到磁感线分布图,如图5所示。
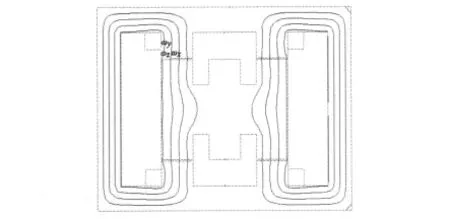
图5 磁感线分布图
从图5可知,在忽略漏磁的情况下,磁感线分布均匀。因此,截取该圆筒型直线电机的某一段两齿一槽进行仿真是可取的。
为了提高仿真速度,本文截取该直线电机的一段(两齿一槽)为例,进行三维仿真分析。
选用SOLID96单元,该单元是电磁场分析专用单元,可用来为模型所有内部区域建模,包括:饱和区、永磁区和空气区。前文已经提到,标量磁位法将电流源以基元的方式单独处理,因此,本文选用SOURC36单元来表示电流传导区,电机模型采用0.5 mm厚、型号为50WW470的矽钢片来模拟,矽钢片的B-H曲线如图6所示。

图6 矽钢片B-H曲线
用APDL定义单元类型及材料属性如下:
/PREP7
ET,1,SOLID96 !定义单元类型
ET,2,SOURC36 !定义电流源单元
MP,MURX,1,1.0 !设置材料属性
MAT,2,
MPREAD,′50WW470′,′SI_MPL′,′′,LIB
MAT,3,
MPREAD,′50WW470′,′SI_MPL′,′′,LIB
为方便修改模型尺寸,建模前先设置模型基本参数,用APDL语言表述如下:
!设置定子基本参数
*SET,STATOR_L,18e-3
*SET,STATOR_r1,50e-3
*SET,STATOR_r2,35e-3
*SET,STATOR_r3,24e-3
*SET,STATOR_r4,21.5e-3
*SET,STATOR_r5,20e-3
*SET,STATOR_tooth,2e-3
*SET,STATOR_slot,4e-3
*SET,STATOR_w,5e-3
*SET,STATOR_deg1,24
*SET,STATOR_deg2,30
!设置线圈匝数及线圈电流
*set,coil_n,100
*set,coil_i,5
!设置转子基本参数
*SET,rotor_L,15e-3
*SET,rotor_tooth,2e-3
*SET,rotor_slot,1e-3
*SET,rotor_r1,7e-3
*SET,rotor_r2,18.5e-3
*SET,rotor_r3,19.9e-3
*SET,air_w,0.1e-3
仿真结果所研究的是电机动子与定子间的磁通密度,所以建模时要将动子与定子间的气隙单独建模。电机整体建模完毕后,还要建立一个空气场包裹整个电机整体,两者通过Overlap操作进行交叠融合,以保证仿真结果更加接近于现实中的实验结果。
建立实体模型后对该实体模型进行网格划分,本文采用自由划分。
APDL语言表述如下:
ALLSEL,ALL !选择所有实体
SMRT,6 !定义智能划分等级为6
MSHAPE,1,3D !指定划分单元形状
MSHKEY,0 !选择自由划分
VMESH,ALL !进行体网格划分
网格划分后,圆筒型直线步进电动机定动子有限元模型如图7所示。
外围空气场网格如图8所示。
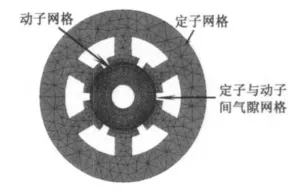
图7 网格划分后的电机模型
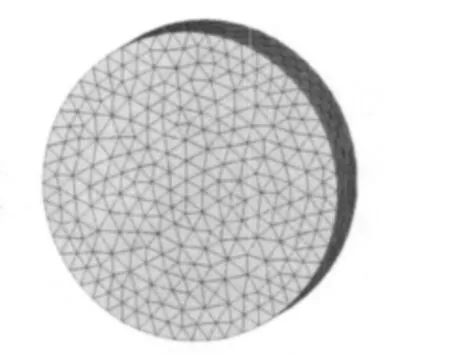
图8 外围空气场网格
为电机施加电流源,本文以一对极为例。如前所述,本文采用SOURC36单元来搭建环形跑道线圈。用APDL语言表述如下:
LOCAL,11,0,0,0.028,7e-3,,,,1,1,
WPCSYS,-1,11,
wprota,0,90,0
RACE,0.007,0.009,0.002,coil_n*coil_i,0.002,0.009,,,′coil1′ !定义环形跑道线圈
施加电源后,圆筒型直线步进电动机定动子有限元模型如图9所示。

图9 施加电源后,圆筒型直线步进电动机定动子有限元模型
图7是用有限元哑单元SOURC36来表示线圈,而该单元并不是一个真正的有限元,因此,只能通过直接生成来定义它们,而不能通过实体建模的方式来实现,所以,图8是用哑单元SOURC36来表示的线圈没有被网格划分,但这并不影响求解结果。
3.2 仿真求解结果
采用标量磁位DSP法求解上述电机模型,APDL语言表述如下:
ALLSEL,ALL
FINISH
/SOL
MAGSOLV,3,,,0.001,25,1!求解
/REPLO
FINISH
求解结果如下:
图10是当电机线圈通电时,磁通密度沿定子轭部经动子形成回路,图11是电机齿部磁通密度矢量图,图12是磁通密度节点云图,在线圈处磁通密度最大,而其余四个极由于没有励磁电流,因此此处的磁通密度节点云图颜色最浅。
从图13、图14可以看出,在沿路径方向所受到的磁通密度曲线和所受电磁力曲线具有相同的趋势,波峰和波谷数目一一对应,这表明,在沿路径方向上磁通密度越大,那么所受到的电磁力也越大。仿真数据表明,该电机的设计是完全正确的。

图10 磁通密度B矢量图
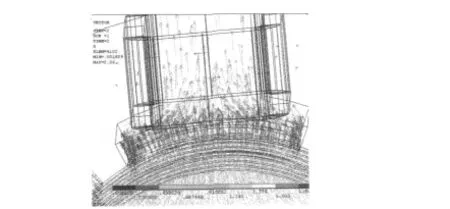
图11 电机齿部磁通密度B矢量图(局部)
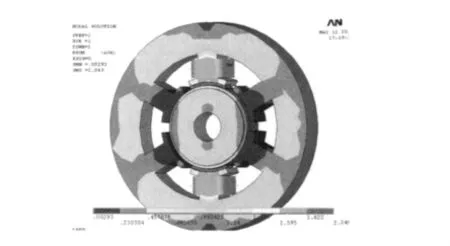
图12 磁通密度B节点云图

图13 沿路径方向磁通密度曲线图
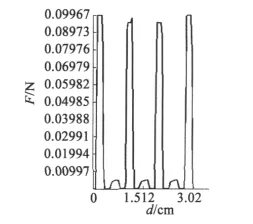
图14 沿路径方向所受电磁力曲线图
4 结 语
ANSYS软件是一种功能强大的有限元分析软件,具有较高的分析精度,可以灵活方便地对电磁场问题进行分析和计算。本文根据有限元原理,应用ANSYS自带的APDL语言编写的软件对圆筒型直线步进电动机电磁场进行了计算与仿真,对电机研究与分析具有较强的现实意义。
[1] 胡之光.电机电磁场的分析与计算[M].北京:机械工业出版社,1982.
[2] 唐兴伦.ANSYS工程应用教程/热与电磁学篇[M].中国铁道出版社,2003.
[3] 张洪信.有限元基础理论与ANSYS应用[M].北京:机械工业出版社,2006.
[4] 浙江大学.直线感应电动机[M].北京:科学出版社,1978.
[5] 李忠杰,宁守信.步进电动机应用技术[M].北京:机械工业出版社,1988.
[6] 张倩,胡仁喜,康士延,等.ANSYS12.0电磁学有限元分析从入门到精通[M].北京:机械工业出版社,2010.
