基于FPGA的四轴舵系统的设计与实现
2010-11-20刘亚静王治国王鹏飞李铁才
刘亚静,王治国,王鹏飞,李铁才
(1.哈尔滨工业大学,黑龙江哈尔滨150001;2.深圳航天科技创新研究院,广东深圳518057)
0 引 言
随着永磁电机理论、电力电子、微电子、新型控制理论的进步,稀土永磁电动舵机在快速性、负载刚度和温升方面有了明显的改善,其在航空航天领域方面显示出广泛的应用前景和强大的生命力。但总体来讲,电动舵机的刚度比液压系统差,受负载变化及外部扰动的影响较大,从而影响其响应速度及控制精度,因此,要保证电动舵机系统的鲁棒性以及响应的快速性和准确性,控制器的设计非常重要[1-2]。
数字信号处理器的出现使得舵机等伺服系统的模块化和全数字化更容易实现,长期以来构建在现代控制理论基础上的一些复杂控制算法得以快速在线计算及进行优化处理,从而把过去认为只能在理论上成立而在实际上无法应用的数字原理实用化。
然而,相较于近些年出现的现场可编程逻辑器件(FPGA),数字信号处理器存在以下制约其性能的瓶颈:串行执行的结构限制了其数据处理速度,当运算复杂并且实时性要求非常高时,采用此种架构就出现了瓶颈;当运算精度要求较高时,固定的数据宽度往往力不从心;硬件结构固定,其扩展能力有限。而FPGA完全解决了以上问题,凭借其出色的并行性、快速性、灵活性等优点,目前越来越广泛地应用于运动控制系统之中[3-6]。
本文采用VerilogHDL硬件描述语言及EDA工程设计方法,按照时分复用的设计思想,在单片FPGA中实现了四轴舵位置伺服系统,包括全数字电流环、速度环、位置环、速度估算、四轴时序控制等模块,最后在Xilinx公司的FPGA(XC3S400)上进行设计与实现。
1 系统设计
本系统主要包括电流环、速度环、位置环调节器及其相应的数据锁存器,PWM生成单元,A/D转换接口及其相应的时序控制单元,位置传感器接口单元,电流定标模块,速度估算模块和多轴时序控制单元等。如图1所示。
1.1 电流环设计
为了抑制舵系统母线电压的波动以及其它干扰,减小位置环的设计难度,通常进行电流闭环控制,对于方波无刷电动机,其电流采样通常为母线电流采样和相电流采样,而前者不能采样续流过程,而后者采用两个电流传感器,增加了系统成本和复杂度。本文提出一种新型的电流采样策略,采用一个传感器即可完整采样电流信息,其电路拓扑结构如图2所示。
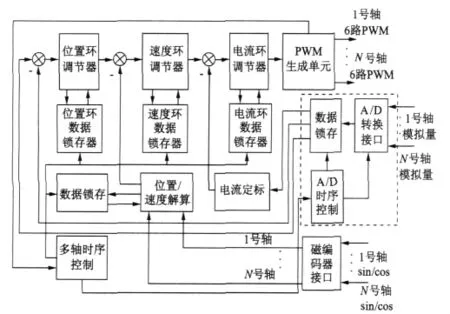
图1 四轴位置伺服系统框图
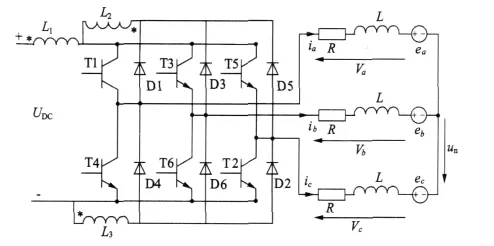
图2 电流采样拓扑结构
电流环是驱动控制系统的最后一个控制环节,目前电流环的一般指标为12位精度,500 μs响应时间,即电流环带宽为2 kHz。
由于PI控制算法简单、鲁棒性好和可靠性高、技术成熟,被广泛应用于过程控制、机器人控制、自动化等领域,尤其适用于可建立精确数学模型的确定性控制系统[7]。而FPGA的控制实际上是一种离散数字控制,因此要将PI调节器的传递函数表示成离散形式,为了保证离散系统和连续系统具有一样的稳定性,采用双线性变换,可得积分项函数:

其等效的差分方程:

PI调节器经双线性变换后,得迭代公式:

式中:T为离散化时的采样周期;e(k)、e(k-1)为误差输入;Kp为比例增益;KX为积分增益,PI调节器的硬件实现如图3所示。

图3 PI调节器硬件实现框图
1.2 位置及速度环设计
本文研究的是小型电动舵系统,其要求动态响应快,这就要求舵系统的位置环有较高的带宽,本文选用PDFF控制策略。此外,舵位置伺服系统较为复杂,如果把诸如克服摩擦、抑制铰链力矩等问题都集中到位置环来解决,往往很难实现要求的性能指标。因此,通常在位置系统中引入速度闭环,通过反馈通道来改善对象的静、动态特性,增加内环刚度,提高抑制干扰的能力。通过分析位置环和速度环的要求,按照模块化的设计思想,可以将位置环和速度环调节器统一为一个表达式,如下:
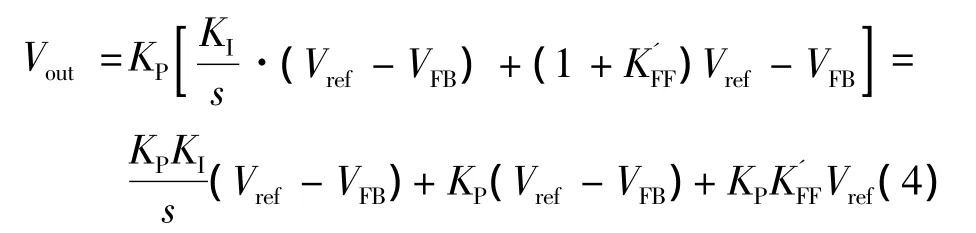

式中:T为离散化时的采样周期;KP为比例增益;KX为积分增益,为前馈增益,
当KFP=0时,上式变为PI调节器的表达式,当KFP=-1时,上式则为PDF调节器的表达式。当KFP=1时,上式为PDFF控制器,因此式(5)统一了PI、PDF和PDFF的公式,其硬件实现框图如图4所示。

图4 FIR滤波器结构框图
又因为舵系统体积和工作环境的限制,很难将编码器或旋转变压器等传感装置应用于舵系统,这就增加了速度闭环的难度。通过对位置信号作微分运算间接获取速度信号是业界最广泛采用的方法,由于微分过程对噪声的敏感性,通常要加入滤波环节以减少噪声。
本文采用三阶Taylor展开式进行速度计算,如下:

其硬件实现相对简单,在此不再赘述。由上式所求得的速度含有大量的噪声,如果直接用其作为速度反馈值,会加剧系统的抖动,因此需要进行滤波处理,本文采用16阶的FIR滤波器,其实现框图如图5所示。

图5 PDFF调节器硬件实现框图
1.3 多轴时序设计
系统时序又可以分成多轴时序控制单元和单轴数据计算时序控制单元。其中,多轴时序控制单元为控制1号轴至N号轴之间的转换;而单轴数据计算时序控制单元为控制每个轴进行数据计算。图6为多轴时序控制单元的时序规划,每个轴的计算是顺序进行的。

图6 多轴时序控制单元
图7为单轴数据计算时序控制单元的时序规划,每个轴包括三个环路,分别为位置环、速度环和电流环,其对应于三种情况:(1)只有电流环,如图7中的1所示;(2)速度环+电流环,如图7中的2所示;(3)位置环+速度环+电流环,如图7中的3所示。

图7 四轴控制时序图
2 试验分析
前面所述功能均用Verilog HDL语言进行描述,利用Mentor公司的EDA仿真软件Modelsim对各个功能模块进行实现仿真,并在Xilinx公司提供的低成本、大容量的FPGA spartan3(xc3s400)中得以实现。
本试验所用的电机为最高转速10 000 r/min、额定电流为3 A的100 W无刷直流电动机,电流反馈采用零磁通磁平衡式霍尔电流传感器;位置反馈采用精密电位器,±10 V对应±23°。如表1所示。

表1 试验电机参数

图8 调节器仿真波形
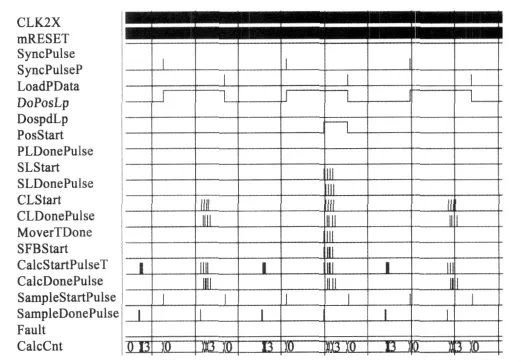
图9 多轴时序仿真波形
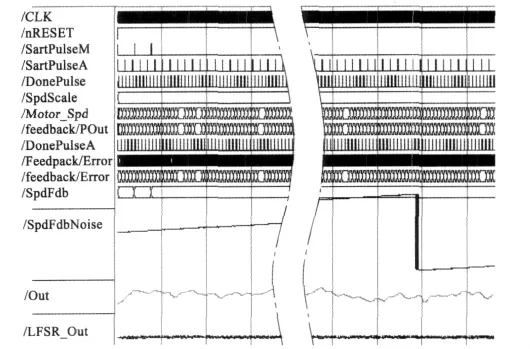
图10 速度估算仿真波形
图8~图11分别为调节器模块、速度估算模块、多轴时序控制模块以及系统的Modelsim实现仿真波形。图12为位置跟踪误差,其误差基本在20个数字量之内,完全满足设计要求。图13为位置给定为2 V时,四轴舵系统的位置响应波形,其上升时间为55 ms,稳态误差小于0.5%,超调小于1%。
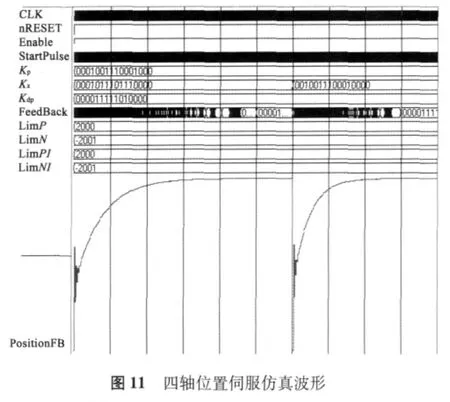

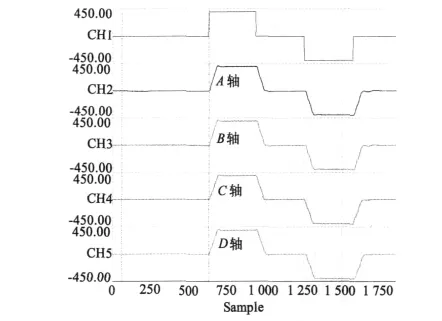
图13 四轴位置阶跃给定试验波形
3 结 语
本文提出了一种利用FPGA实现全数字化四轴舵位置伺服系统的设计方案。在单片FPGA上实现了全数字电流环、速度环、位置环、速度估算、四轴时序控制等模块。其从原理上实现四轴的严格同步,它的高整合度极大地简化了舵系统的整体结构,紧缩了其体积,增强了系统设计的灵活性,并且大幅度降低了其成本。试验结果表明,四轴舵位置系统做5%的位置阶跃响应时的响应时间小于30 ms,稳态跟踪误差小于0.5%,超调小于1%,因此该系统具有良好的动态和静态性能。
[1] 郭宏,邢伟.机电作动系统发展[J].航空学报,2007,28(03):620-627.
[2] 沙南生,李军.功率电传机载一体化电作动系统的研究[J].北京航空航天大学学报,2004,30(9):909-912.
[3] 周兆勇.面向军事用途的片上型交流伺服系统的研究[D].哈尔滨工业大学,2006:100-110.
[4] Tzou Y Y,Hsu H J.FPGA Realization of Space-Vector PWM Control IC for Three-Phase PWM Inverters[C]//IEEE Transactions on Power Electronics.1997:953-963.
[5] Zhou Z,Li T,Toshio T.FPGA realization of a high-performance servo controller for PMSM[C]//Anaheim.2004:1604-1609.
[6] Monmasson E,Cirstea M N.FPGA Design Methodology for Industrial Control Systems-A Review[J].IEEE Transactions on Industrial Electronics,2008,54(4):1824-1842.
[7] Chan Y F,Moallem M,Wang W.Efficient implementation of PID control algorithm using FPGA technology[C]//43rd IEEE Conference on design and control.2004(5):4885-4890.
