基于EDA的直流电机PWM控制
2010-11-07张飞南京大学金陵学院信息科学与工程系210089
张飞 南京大学金陵学院信息科学与工程系 210089
基于EDA的直流电机PWM控制
张飞 南京大学金陵学院信息科学与工程系 210089
可编程门阵列器件(FPGA)的使用简化了电路的系统结构,提高了系统工作的稳定性和可靠性。利用硬件描述语言(VHDL)对FPGA进行编程,在片内可以实现电机控制逻辑,包括速度等级模块、锯齿波发生器存模块、数字比较模块、正反转模块等。
可编程门阵列器件; PWM; 硬件描述语言
1、引言
电子设计自动化(EDA,E1ecbonics Design Automation)是一种以计算机为基本工作平台,利用计算机图形学、拓扑逻辑学、计算数学、人工智能学等多种计算机应用学科的最新成果开发出来的一整套软件工具,是用于帮助电子设计工程师从事电子元件、产品和系统设计的综合技术[1]。
直流电机由于具有速度控制容易,启、制动性能良好,且在宽范围内平滑调速等特点而在冶金、机械制造、轻工等工业部门中得到广泛应用。直流电动机转速的控制方法可分为两类,即励磁控制法与电枢电压控制法。励磁控制法控制磁通,其控制功率虽然小,但低速时受到磁饱和的限制,高速时受到换向火花和换向器结构强度的限制;而且由于励磁线圈电感较大,动态响应较差。所以常用的控制方法是改变电枢端电压调速的电枢电压控制法。调节电阻R即可改变端电压,达到调速目的。但这种传统的调压调速方法效率低。随着电力电子技术的进步,出现了许多新的电枢电压控制方法,其中PWM(脉宽调制)是常用的一种调速方法。其基本原理是用改变电机电枢(定子)电压的接通和断开的时间比(占空比)来控制马达的速度,在脉宽调速系统中,当电机通电时,其速度增加;电机断电时,其速度减低。只要按照一定的规律改变通、断电的时间,即可使电机的速度达到并保持一稳定值。最近几年来,随着微电子技术和计算机技术的发展及单片机的广泛应用,使调速装置向集成化、小型化和智能化方向发展。
2、脉冲调制PWM原理
直流电动机转速的控制方法可分为两类,即励磁控制法与电枢电压控制。在对直流电动机电枢电压的控制中,调节方式有脉冲幅值调PAM(Pulse Amplitude Modulation)和脉冲宽度调制PWM(Pulse Width Modulation)两种。在PAM方式中,直流母线电压可调,通过调节直流母线电压的大小来调节电机转速。在PWM方式中,直流母线电压不可调,通过斩波调节电机输入电压的平均值,从而达到调节转速的目的。最常用的直流调速技术是脉宽调制(PWM)直流调速技术,它具有调速精度高、响应速度快、调速范围宽和耗损低等特点。本系统采用电枢电压控制法,是通过调节PWM触发信号的占空比来改变伺服电的平均输入电压,从而实现调速的目的[2]。电动机的电枢绕组两端的电压平均值U0为:

式中,D为占空比,Us电源电压,D的变化范围为[0,1]。由式(1)可知,当电源电压Us不变的情况下,电枢两端电压的平均值U0取决于占空比D的大小,改变D值也就改变了电枢两端电压的平均值,从而达到控制电动机转速的目的,即实现PWM控制。
本设计是通过锯齿波发生器在CLK1的激励下输出周期性的锯齿波。两路计数器的输出同时加在数字比较器上,当锯齿波发生器模块输出值小于速度等级模块输出的规定值时,比较器输出低电平;当锯齿波发生器模块输出值大于速度等级模块输出的规定值时,比较器输出高电平。改速度等级模块的设定值,就可以改变PWM输出信号的占空比。速度等级模块可以选择不同的速度等级,由Level控制速度等级的选取,CLK0是计数时钟输入端。
PWM波的生成如图1所示:
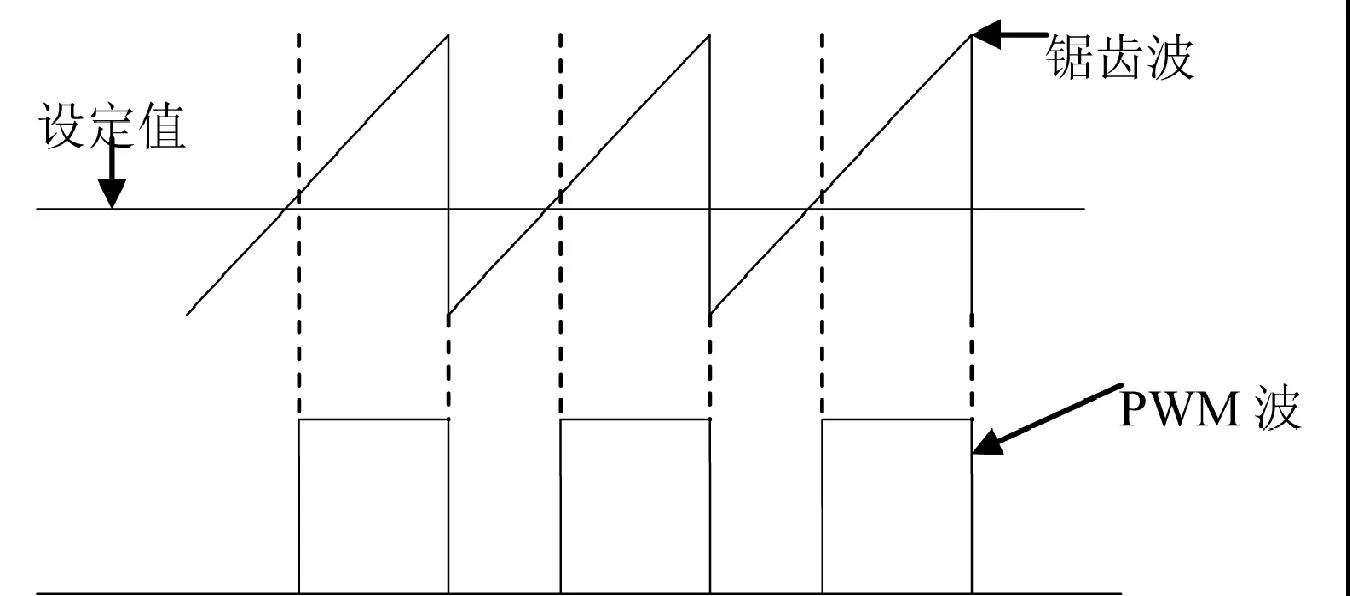
图1 PWM波生成图
3、电机PWM控制的实现
本设计是通过PWM控制来实现直流电机速度控制。PWM控制就是产生一定周期,占空比不同的方波信号,当占空比较大时,电机转速较高,否则电机转速较低。当采用FPGA产生PWM波形时,只需FPGA内部资源就可以实现,数字比较器的一端接设定值输出,另一端接锯齿波发生器输出。当锯齿波发生器的计数值小于设定值时输出低电平,当计数器大于设定值时输出高电平,这样就可通过改变设定值,产生占空比不同的方波信号,从而达到控制直流电机转速的目的。并且通过正反转选择模块来控制电机的旋转方向[3]。
直流电机控制电路主要由2部分组成,如图2所示。
(1)FPGA中PWM脉宽调制信号产生电路;
(2)FPGA中正/反转方向控制电路。

图2 总体设计框图
3.1 PWM调速的实现
目前实现PWM波形的方法很多,本文采用计数比较的方法产生PWM波形。该方法可以得到脉冲周期固定的PWM信号。PWM波形产生模块可由以下几部分组成:
(1)速度等级模块。通过Level选择输入速度等级,输入等级的设定值计数器的输出值增加,PWM的占空比增加,电机转速加快;输入速度等级设定值计数器的输出值减小,PWM的占空比减小,电机转速变慢。
(2)锯齿波模块发生器模块。是利用计数器根据clk1的输入进行计数,产生一个周期性的锯齿波。
(3)比较器模块。将速度等级模块的输出和锯齿波模块的输出进行比较,得到PWM信号。
(4)正反转模块。对PWM的输出进行选择,确定它是正转还是反转。
3.2 驱动电路
本设计的电机驱动电路采用的是一种典型的直流驱动典论。电路得名于“H桥式驱动电路”是因为它的形状酷似字母H。4个三极管组成H的4条垂直腿,而电机就是H中的横杠。要使电机运转,必须导通对角线上的一对三极管。根据不同三极管对的导通情况,电流可能会从左至右或从右至左流过电机,从而控制电机的转向[4]。
本设计是通过向驱动电路输入两个方向信号。如果Z信号为1,F信号为0,那么三极管T1和T4导通,电流从左至右流经电机,电机正转;如果Z信号变为0,而F信号变为1,那么T2和T3将导通,电流则反向流过电机,电机反转。其中电机的转速是由PWM模块产生的一定占空比的PWM波,用来控制电机转速[5]。
4、仿真实验
PWM控制电路由速度等级模块、锯齿波发生器模块、数字比较器模块组成。锯齿波发生器在CLK1的激励下输出从0开始的逐渐增大的锯齿波。两路计数器的输出同时加在数字比较器上,当锯齿波发生器模块输出值小于速度等级模块输出的规定值时,比较器输出低电平;当锯齿波发生器模块输出值大于速度等级模块输出的规定值时,比较器输出高电平。改速度等级模块的设定值,就可以改变PWM输出信号的占空比。速度等级模块可以选择不同的速度等级,由Level控制速度等级的选取,CLK0是计数时钟输入端[5]。
图3、图4分别是占空比为0.2、0.4的PWM波时序仿真图。通过Level改速度等级模块设定值,可以改变1个PWM周期中高低电平的比值,即PWM输出信号的占空比。驱动直流电机转动的是PWM电流的平均值,PWM输出信号的占空比变化,从而也改变了直流电机的转速。计算机仿真结果表明,FPGA电机控制电路能有效地产生PWM控制信号控制电机的转速,且控制精度由FPGA中的数字比较器决定。
5、结束语
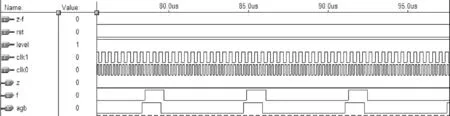
图3 占空比为0.2的波形仿真
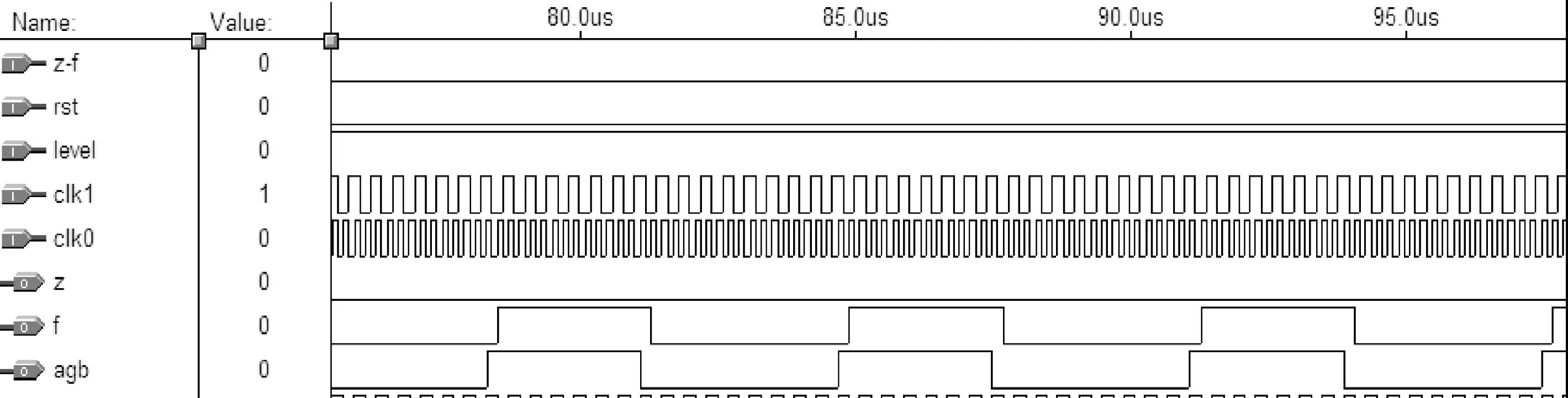
图4 占空比为0.4的波形仿真
本文所介绍的系统是一个基于CPLD/FPGA的PWM调速系统。它控制的对象是永磁式直流力矩电动机,该直流力矩电动机可以直接由H桥PWM驱动器驱动。本设计把电机系统与具有内部结构重组、现场可编程的CPLD/ FPGA芯片完美的相结合起来实现对电机速度的精确控制。由于PLD具有连续连接结构,易于预测延时,使电路仿真会更加准确,且编程方便,速度快,集成度高,价格低,从而使系统研制周期大大缩短,产品的性能价格比提高。
[1]曾繁泰. VHDL程序设计[M]. 北京: 清华大学出版社. 2003.
[2]蒋璇. 数字系统设计与PLD应用技术[M]. 北京: 电子工业出版社.1997.
[3]陈雪松, 滕立中. VHDL入门与应用[M]. 北京: 人民邮电出版社. 2000.
[4]徐志军. 大规模可编程逻辑器件及其应用[M]. 成都: 电子科技大学出版社. 2004.
[5]赵雅兴. FPGA原理及应用[M]. 天津:天津大学出版社. 2000.
10.3969/j.issn.1001-8972.2010.21.069
