改进高频信号注入法的IPMSM转子位置检测研究
2010-10-25杨淑英
廖 军, 张 兴, 杨淑英, 黎 芹
(合肥工业大学电气与自动化工程学院,安徽合肥 230009)
永磁同步电机(PMSM)的运动控制需要精确的转子位置和速度信号去实现磁场定向,一般的转子位置/速度检测方法包括测速发电机和光电码盘等,在成本或性能上都难以满足高性能和复杂条件下的电机控制要求。自20世纪70年代以来发展的无传感器(Sensorless)控制技术就是为了解决这一问题而产生的。它主要是依据电机方程,即电压电流和转子位置速度之间的耦合关系间接实现对硬件结构的简化[1]。
目前,无(位置、速度)传感器控制方法按其适用范围基本上可分为2类:基于电机基波模型的无传感器控制[2-4]和以高频信号注入法为基础的基于电机谐波模型的无传感器控制[5-9]。其中第2种方法要求电机具有一定程度的凸极性,通过施加持续高频激励可实现包括零速在内的全速度范围内转子位置的有效检测。该方法追踪的是电机转子的空间凸极效应,对电机参数的变化不敏感,鲁棒性好,因此,基于高频信号注入法的PMSM无位置传感器运行研究具有重要的现实意义和应用前景。
目前高频信号注入法中要使用大量的滤波器以提取位置信息,其中带通滤波器、带阻滤波器的使用严重地影响滤波的精度,带来较大的相移和幅度衰减等问题。
本文基于高通滤波器对于直流量具有零幅值的传递函数的特点,用对应特定频率的同步旋转坐标系下的高通滤波代替带通滤波器和带阻滤波器,可以有效地提高滤波的精度。仿真结果表明这种方法可以准确地估算转子位置,从而实现PMSM的无传感器位置检测。
1 高频激励下的PMSM数学模型
1.1 磁通饱和模型
在转子同步旋转坐标系下,PMSM的dr轴定子磁链和dr轴定子电流的关系如图1所示,其中Λm是没有定子电流时的转子永磁体磁链[10]。当定子电流的直轴电流>0时,则电枢反应方向与 Λm相同,其增磁作用会引起定子磁链的饱和。当定子电流的直轴电流<0时,电枢反应方向与Λm相反,其去磁作用使定子磁链退出饱和。利用这种饱和效应可以实现对转子永磁体极性判别。
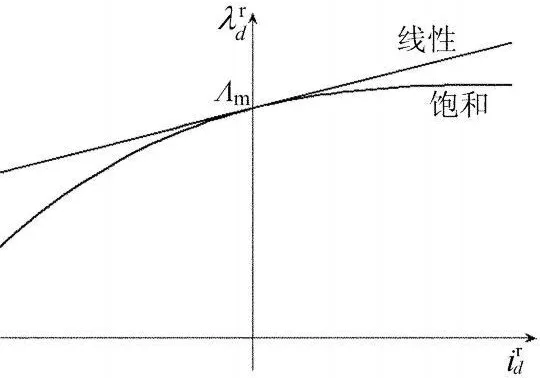
图1 PMSM dr轴定子磁链和dr轴定子电流的关系
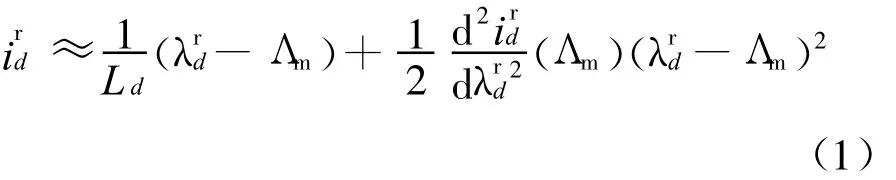
这种饱和关系写成二阶泰勒级数的展开形式为:
1.2 高频激励下的PMSM定子电流
本文所采用的高频电压注入方式为旋转电压注入法,在PWM电压源逆变器供电的情况下,通过逆变器将一组三相平衡的高频电压信号直接迭加到电机的基波激励上,这种方式实际上是在静止坐标系上注入旋转高频电压矢量。
注入的角频率为ωi,幅值为vi的高频电压信号可以表示为:

写为空间矢量形式为:


高频注入信号的频率一般为0.5~1.0 kHz,远高于电机基波频率,而在高频激励下,由于电阻压降相对于电感电压较小,故高频激励下永磁电机在静止坐标系下的模型可以简化为:

将(5)式带入(1)式,得到在转子同步旋转坐标系中电机磁饱和效应时的高频电流响应为:
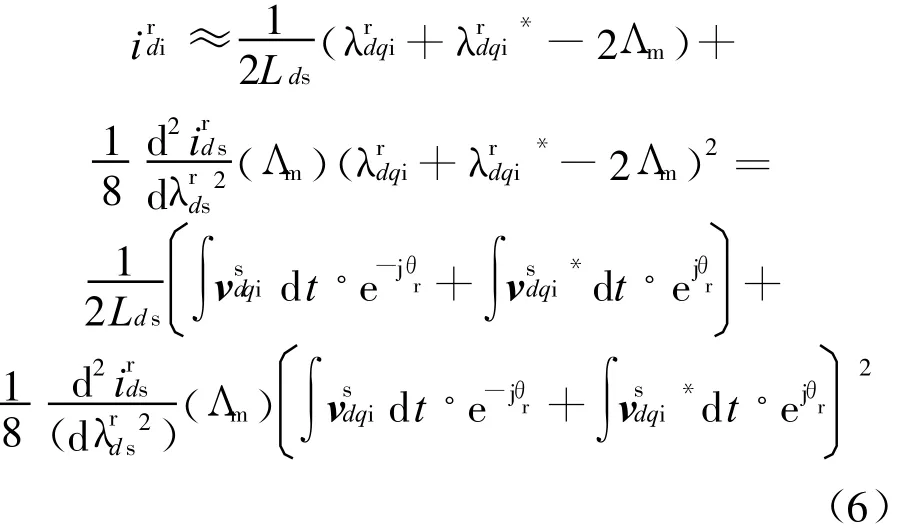
而对于q轴不用考虑磁饱和效应,从而有:

在静止坐标系上的定子电流空间矢量为:

将(6)式、(7)式带入(8)式得:

可以看出,高频响应电流中包含相对于高频电压信号的正序和负序分量,以及一个二次分量。
2 信号处理及位置观测器
改进滤波环节并利用外差法以提取负序分量来得到转子位置误差,通过扩展龙伯格观测器可以跟踪转子角度,通过电流二次分量中的饱和项系数来鉴别磁极。
2.1 改进的滤波环节
为了提取高频电流负相序分量相角中所包含的转子凸极位置信息,必须很好地滤除基波电流、SPWM载波电流和高频电流中的正序分量。通常采用带通滤波器提取高频电流,如图2所示。为尽可能地去除其它频率谐波分量的影响,带通滤波器需要有尽可能窄的通带宽度,这又会造成有用的高频电流信号的较大相位滞后和幅度衰减。由于经过带通滤波器之后的电流只含有正相序高频电流分量和含有转子位置信息的负相序高频电流分量,可以将该电流矢量变换到与正序高频电流分量同步旋转的坐标系下,此时正相序高频电流矢量变成直流,通过一个常规的高通滤波器就可以滤除,最终只剩下负相序高频电流分量,这是一个可用来跟踪凸极的有用信号。在矢量控制中,基波电流的反馈是必要的,注入高频信号以后,为了提取基波电流作为反馈,通常的方法是使用带阻滤波器来滤掉高频电流分量[6,8]。带阻滤波器的使用同样带来较大的相位滞后和幅度衰减。

图2 常规的滤波环节
由于高通滤波器对于直流量具有零幅值的传递函数,因此,同步旋转坐标系下的高通滤波器能完全消除以同步频率出现的任何信号[9]。即本文所采用的方法,对基波电流、正相序高频电流、负相序高频电流的滤除全部采用同步轴系滤波的方式,可以避免使用带阻滤波器和带通滤波器。
改进后的滤波环节如图3所示。首先通过将电流矢量变换到与高频正序电流分量同步旋转的坐标系下,通过高通滤波器1就可以滤除电流中的正序分量。滤波后的电流矢量再变换到与负序高频电流分量同步旋转的坐标系下,该变换需要估计的转子位置角度,通过高通滤波器2予以滤除后即为在该坐标系下的基波电流矢量,实现了对于基波电流的提取。该量变换到估计的转子同步旋转坐标系下即可作为电流反馈。
对于基波电流的滤除也是采取同样的方法,将滤除过正序电流分量后的电流矢量变换到一个与估计转子同步旋转的坐标系中,通过高通滤波器3就可以将基频电流分量滤除,剩下的就是含有转子位置信息的负相序高频电流分量。图3中的低通滤波器1是为了滤除残留的基波电流分量和载波电流分量,该低通滤波器也可以放在外差处理环节之后,以减少位置估计的相移。

图3 改进的滤波环节
2.2 位置跟踪观测器与极性判别
为了得到跟踪观测器所需要的转子位置误差,这里采用外差处理的方式解调空间凸极调制的负序电流分量,将经过滤波和坐标变换后的负序分量写成复数形式,则有:


这样,通过调节误差信号使之趋于零,就可使转子位置的估计值 ˆθr收敛于真实值 θr。对 ˆθr进行微分,就可以获得转子角速度ˆωr,本文中位置观测器使用了扩展龙伯格观测器,如图4所示,其中虚线部分表示外差算法。

图4 位置跟踪观测器
由于引入了转矩指令值的前馈,因此其输出信号可以无相位滞后地跟踪其输入信号[11]。
对于图4所示的观测器,可写出相应的多个发生零误差位置的表达式 ˆθr=θr+nπ/2;由奇数值给出的角度,误差信号为零,但观测器不是局部稳定的;由偶数值给定的角度,误差信号为零,且观测器是局部稳定的[12],所以只讨论由偶数值给定的角度。当n=2k时,估计转子位置即为转子磁场的N极,估计的角度结果不会改变,而n=2k+1时,估计的转子位置实际对应S极,电角度π弧度被加到估计的转子位置上。
将电流信号经过图5所示的信号处理后,得到极性判别项为:

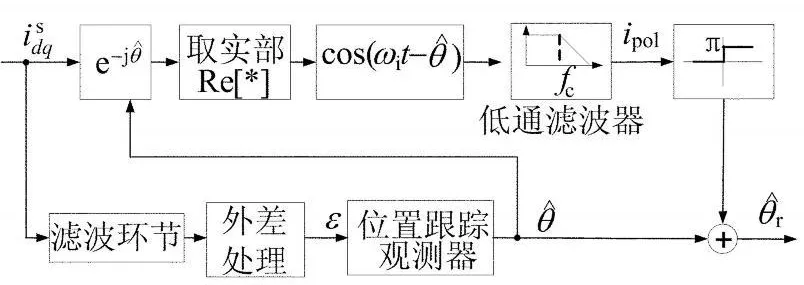
图5 极性判别环节
3 仿真实验
为验证本文提出的PMSM无位置传感器控制算法的可行性和有效性,对一台内插式永磁同步电机(IPMSM)进行了仿真研究,电机参数见表1所列。
PMSM无传感器控制系统原理如图6所示。磁场定向控制器采用电流控制电压源结构,电流和速度控制环都采用比例-积分(PI)调节器,空间脉宽调制用于提供电压指令。注入的高频电压幅值为10 V,频率为 1 000 Hz。

表1 永磁同步电机参数
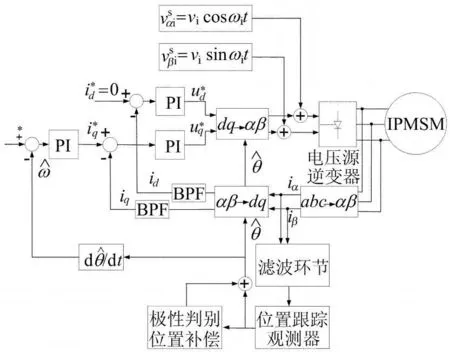
图6 永磁同步电机无传感器控制原理
图7给出了在电机转速为1 200 r/min时通过常规滤波方式和本文改进滤波方式获得的转子位置信息iinsin 2θr,可以看出,经过改进滤波方式后获得的转子位置信息谐波含量较少,能更准确地获得转子位置。
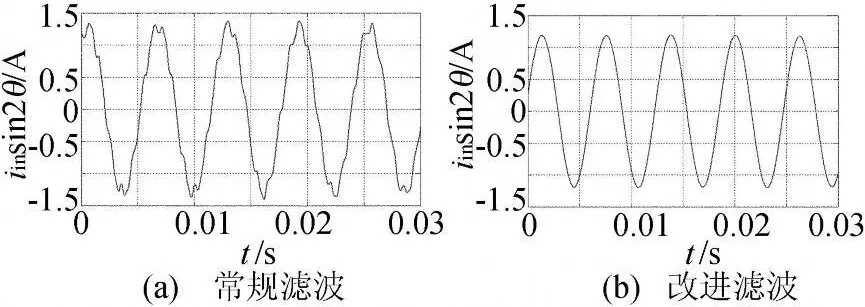
图7 2种滤波方式的对比
图8和图9分别给出了转速为60 r/min和1 200 r/min时的位置实测值与估计值以及两者的差值。可以看出,无论低速还是高速,采用这种检测方法都能够很好地跟踪转子实际位置。
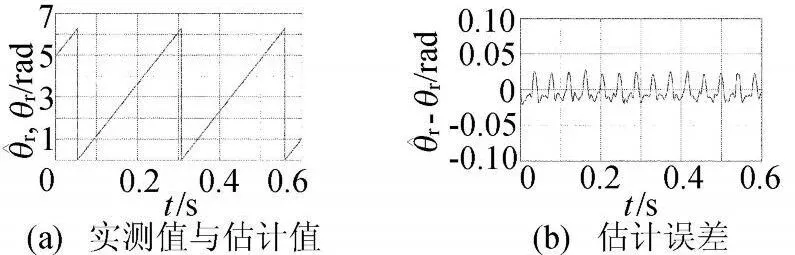
图8 转速60 r/min时的转子位置估计
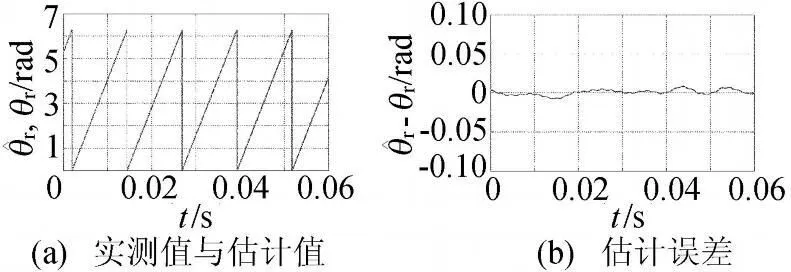
图9 转速1 200 r/min时的转子位置估计
图10给出了实际转速从1 200 r/min按斜坡规律变化到-1 200 r/min时的转子位置实测值与估计值以及两者的差值,可以看出本文采用的方法具有很好的动态跟踪性能。

图10 转速变化时的转子位置估计
4 结束语
高频信号注入法的优点是电机能在低速时实现无位置传感器运行,这种方法对参数的变化不敏感,对外界的干扰具有很好的鲁棒性。为了尽可能地减少由于带通和带阻滤波器的使用带来的相移和幅值衰减等影响,本文提出全部采用同步旋转坐标系下的高通滤波来对转子位置信息进行提取。仿真实验结果表明,该方法在电机高速、低速以及动态条件下均能正确地观测转子的位置信息。
[1] Lorenz R D.Key technologies for future motor drives[C]//IEEE ICEMS'05,Nanjing,China,2005:1-6.
[2] Ertugrul N,Acarnley P.A new algorithm for sensorless operation of permanent magnet motors[J].IEEE T ransactions on Industry Applications,1994,30(1):126-133.
[3] Fatu M,Lascu C,Andreescu G D,et al.Voltage sags ridethrough of motion sensorless controlled PMSG for wind turbines[C]//Record of the 42nd IEEE Industry Applications Conference,New Orleans,LA,USA,2007:171-178.
[4] 马鸿文,陈松立,伍小杰,等.M RAC异步电动机直接转矩控制系统转速辨识研究[J].合肥工业大学学报:自然科学版,2009,32(9):1320-1324.
[5] Jansen P L,Lorenz R D.T ransducerless position and velocity estimation in induction and salient AC machines[C]//Industry Applications Society Annual Meeting,Vol 1,1994:488-495.
[6] Corley M J,Lorenz R D.Rotor position and velocity estimation for a permanent magnet synchronous machine at standstill and high speeds[J].IEEE T ransactions on Industry Applications,1998,34(4):784-789.
[7] Wang L M,Lorenz R D.Rotor position estimation for permanent magnet synchronous motor using saliency-tracking self sensing method[C]//Proc of IEEE-IAS 2000 Annual Meeting,Rome,Italy,2000:445-450.
[8] 秦 峰,贺益康,刘 毅,等.两种高频注入法的无传感器运行研究[J].中国电机工程学报,2005,25(5):116-121.
[9] Ovrebo S.Sensorless control of permanent magnet synchronous machines[D].T rondheim:Faculty of Information Technology,Mathematics and Electrical Engineering,Norwegian University of Science and Technology,2004.
[10] Jeong Y,Lorenz R D,Jahns T M,et al.Initial rotor position estimation of an interior permanent magnet synchronous machine using carrier-frequency injection methods[J].IEEE T ransactions on Industry Applications,2005,41(1):38-45.
[11] Kim H B,Harke M C,Lorenz R D.Sensorless control of interior permanent-magnet machine drives with zero-phase lag position estimation[J].IEEE T ransactions on Industry A pplications,2003,39(6):1726-1733.
[12] 王丽梅,郑建芬,郭庆鼎.基于载波注入的IPMSM转子初始位置估计[J].电气传动,2005,35(3):20-22.
