基于电涡流传感器的全闭环锯片磨床数控系统开发
2010-09-29王平江李佳佳唐小琦
孙 莹 王平江 李佳佳 唐小琦
(①华中科技大学机械学院国家数控系统工程技术研究中心,湖北武汉 430074;②四川省交通职业技术学院,四川成都 611130)
在锯片磨削过程中,由于机床自身运动误差和砂轮磨损,导致数控系统的指令磨削量与实际磨削量出现较大偏差(严重时实际磨削量几乎仅为指令磨削量的一半),从而造成锯片厚度难以控制,生产率低等现象。一般的数控锯片磨床采用刀具半径固定补偿的方式,对磨削误差(主要是砂轮磨损量)进行补偿;但由于砂轮磨损量受磨削参数、锯片材质和砂轮材质等诸多因素的影响,因此,很难达到磨削误差精确补偿的目的,致使锯片磨削尺寸精度难以控制、生产率较低等问题至今无法得到根本解决。本文针对原数控锯片磨床的缺点与不足,探讨了在华中数控世纪星18i数控系统的基础上,通过增设锯片厚度实时在线自动测量功能,数控系统根据测量值与理论值的关系,确定磨削误差,并在磨削过程中进行误差实时补偿,从而实现对锯片磨削过程全闭环控制的方法。
1 全闭环锯片磨削的控制技术
1.1 全闭环锯片磨削的加工工艺
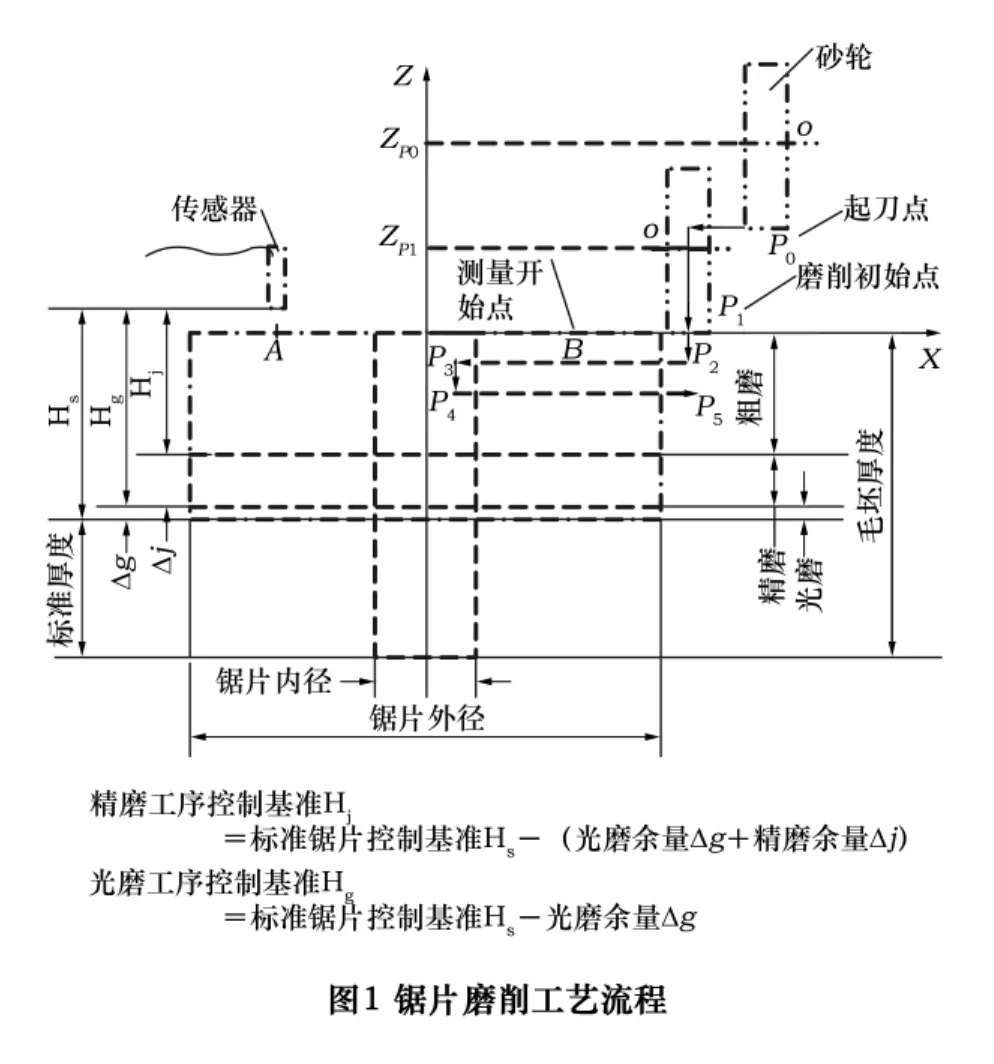
在实际加工中,锯片磨削分为粗磨、精磨和光磨三道磨削工序,用户可以通过人机界面,设置各工序的磨削余量、进给量和磨削速度等参数。全闭环锯片磨削工艺流程如图1所示,磨削前砂轮处于起刀点P0的位置;磨削加工开始,首先完成毛坯厚度的测量,判断是否满足正常磨削条件(即毛坯厚度应不超过规定公差范围),若满足条件,则计算出砂轮在磨削初始点P1时其中心的坐标值ZP1,以及第一次进行磨削的砂轮理论进给量和磨削速度,反之,产生报警信息并退出加工。当毛坯测量完成,且满足正常磨削条件时,砂轮从起刀点P0快速运动到磨削初始点P1,开始磨削循环加工。一个磨削循环的路径为:Z轴进给→X轴由外向中心进给→Z轴进给→X轴由中心向外退出。每完成一个磨削循环,系统便对锯片厚度进行一次测量。根据锯片厚度的测量值,计算本次磨削循环产生的磨削误差,以磨削误差实时补偿原则,确定下一个磨削循环的加工参数,随后继续进行磨削循环加工;当锯片厚度测量值≤进入精磨的理论厚度或进入光磨的理论厚度时,分别进入精磨工序的磨削循环加工或光磨工序的磨削循环加工;当锯片厚度测量值与锯片标准厚度之差在允许的公差范围内时,整个磨削循环加工结束,砂轮快速返回到起刀点P0,磨削加工过程结束。对于同批量锯片的磨削加工,将新锯片毛坯安装好后,不作任何调整,只需按下循环启动键,则系统完成自动加工。
1.2 全闭环锯片磨削的控制策略
1.2.1 全闭环锯片磨削机床系统结构
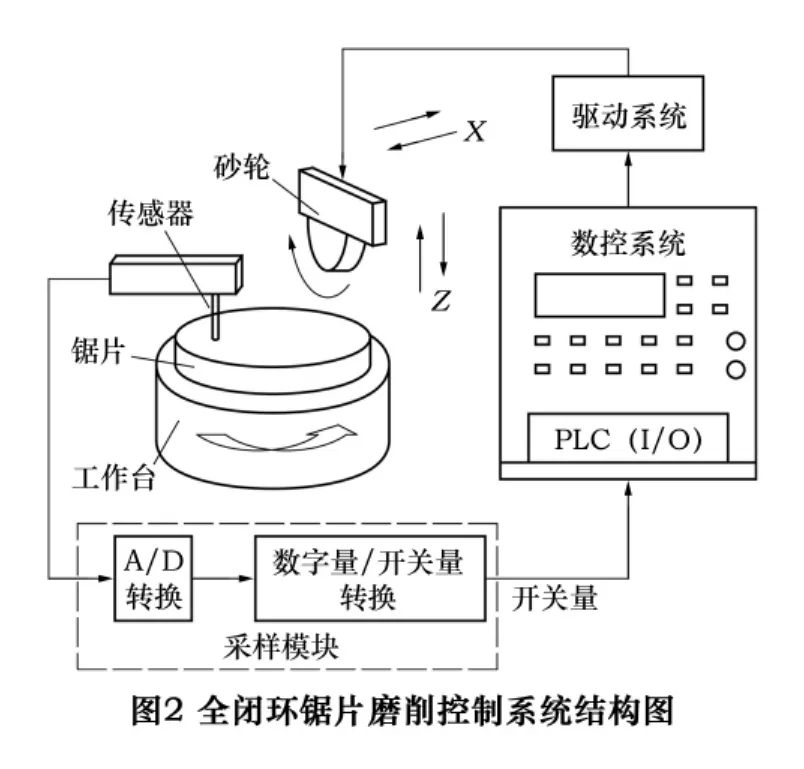
全闭环锯片磨削机床系统是在华中数控世纪星18i数控锯片磨床基础上,通过增设基于电涡流位移传感器的测量系统而构成的,系统结构如图2所示。测量系统由量程为0~4 mm的电涡流位移传感器和采样模块组成,实现对锯片表面与传感器测量头之间距离的在线测量。传感器输出的正比于距离值的电压信号,经采样模块首先转换为12位数字量(测量灵敏度约为:0.001 mm/位),再转换为数控系统PLC的I/O接口能识别的开关量信号。在每一次测量期间,数控系统的PLC以8 ms的执行周期,对I/O接口的测量值进行150次采样。150个数据反馈到数控系统后,经滤波处理和数据转换,获得实际锯片厚度值。
1.2.2 全闭环锯片磨削的控制策略
全闭环锯片磨削系统对磨削加工过程的控制选择G代码程序控制方式。不过,由于在磨削加工过程中,磨削工序类型、加工参数和磨削工艺流程,均由锯片厚度的测量值实时决定,而标准的G代码程序不具备从数控系统外部I/O接口获取测量数据的能力,为此,必须对数控装置的系统软件进行相应的开发,创建一个软件磨削控制器。软件磨削控制器主要实现对来自数控系统外部I/O接口的测量数据的采样计算,并将计算信息实时传递给G代码程序,从而实现由锯片厚度测量值实时控制磨削加工过程的控制思想。由此可见,全闭环锯片磨削加工的控制策略是利用G代码程序和软件磨削控制器相互协调运行,共同完成对磨削加工过程的控制。本系统中,G代码程序与软件磨削控制器的执行采用并行运行方式,其控制的主要原理是:每当G代码程序执行到特定位置时,如图中砂轮由X轴从中心向外退回到与传感器测量头安装位置A点对称的B点位置时(图1),由G代码程序激活软件磨削控制器,再由软件磨削控制器启动测量系统,对锯片厚度进行采样计算。磨削控制器根据本次测量值,进行一系列的判断,如毛坯是否满足正常磨削条件、磨削加工是否结束等;若加工尚未结束,则确定下一次磨削循环的磨削工序类型,并通过前后两次磨削循环后的测量值,确定本次磨削循环的实际磨削量Δ′Z,按式(1)计算出本次磨削循环的磨削误差δZ和砂轮的磨损量ΔR;并以误差实时补偿原则,按式(2)计算出下一次磨削循环的理论磨削量(即G代码Z轴指令值)和确定磨削速度;最后,将本次判断和计算信息传递给G代码,最终通过G代码程序实现对磨削过程的直接控制。
由于本系统通过实时测量能反映砂轮Z轴实际进给值的实际磨削量Δ′Z,并对砂轮Z轴理论进给量进行实时修正,直到砂轮实际Z轴总进给量等于理论总进给量时,才结束磨削加工。因此,实现了砂轮Z轴的全闭环控制,确保了锯片厚度的加工精度。同时,由于砂轮磨损量的实时补偿,减少了磨削循环次数,提高了生产效率。

1.3 全闭环锯片磨削加工的控制流程
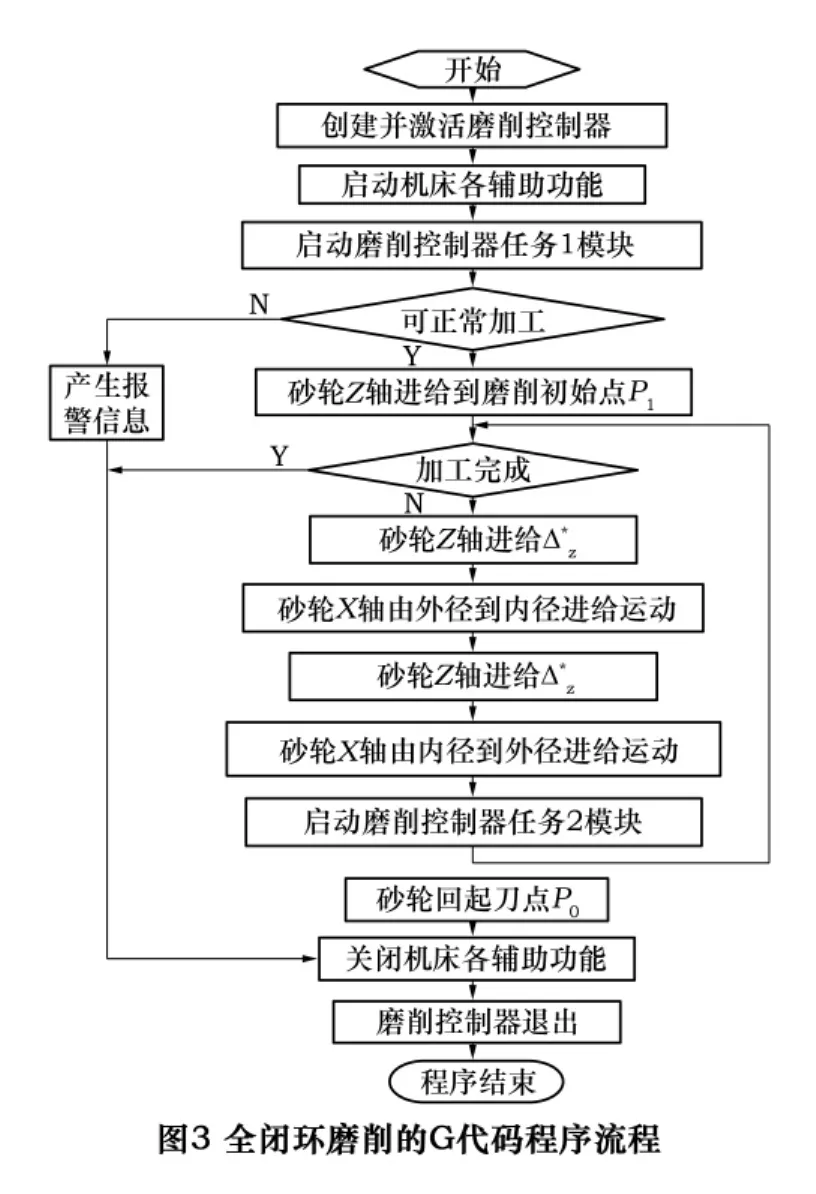
为了便于控制,本系统将全闭环磨削过程分为三个控制工艺阶段,一是砂轮从起刀点P0快速、准确地运动到磨削初始点P1;二是砂轮以相同的路径进行粗磨、精磨和光磨的磨削循环加工;三是砂轮快速、准确地回到起刀点P0。在设计G代码程序的流程时,除实现以上三个工艺阶段的运动控制外,同时考虑到节约系统资源,软件磨削控制器只在执行到特定G代码时才被创建并激活,以执行相应的任务,因此,G代码程序还承担控制软件磨削控制器的任务。综合考虑,本系统的G代码程序流程如图3所示。
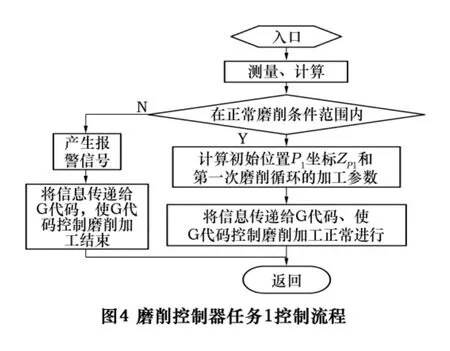
同样,由于G代码程序的执行流程和指令值取决于软件磨削控制器实时采样计算结果,因此,软件磨削控制器反过来又要控制G代码程序。考虑到在不同的磨削控制工艺阶段,软件磨削控制器所完成的功能不同,将其划分为两个任务。任务1主要完成第一个控制工艺阶段中的功能,即对锯片毛坯厚度的采样计算和判断,并将计算信息传递给G代码程序。任务1控制流程如图4所示。任务2主要完成第二个和第三个控制工艺阶段中的功能,即在磨削循环过程中每次对锯片厚度进行采样计算,并将信息传递给G代码程序。除此之外,当锯片厚度满足尺寸要求时,任务2中还应按式(3)计算出砂轮回到起刀点P0时其中心的坐标值Z(N+1)P0(由于砂轮磨损,此值与磨削前的坐标值不相等);同时及时保存此时锯片厚度的测量值HNend和砂轮中心的Z轴坐标值ZNend,用于在下一个锯片磨削加工时,软件磨削控制器在任务1中,按式(4)进行毛坯磨削起始点坐标值Z(N+1)P1的计算。这样,便实现了无需作任何调整就能自动完成批量生产的要求。任务2控制流程如图5所示。


式中,∑ΔR为砂轮累积磨损量。

式中,H(N+1)0为下一个锯片毛坯厚度的测量值。
1.4 全闭环锯片磨削控制基准的建立
由于本系统的测量值是锯片表面到测量头的距离,而并非锯片的厚度,因此,必须建立测量值与锯片厚度之间的尺寸链关系,以及通过测量值来控制磨削工序类型的一系列基准。根据锯片磨削有粗、精和光磨三道工序,本系统建立了标准锯片控制基准HS、光磨工序控制基准Hg和精磨工序控制基准Hj,如图1所示。它们分别对应于标准锯片厚度、进入光磨工序锯片的理论厚度和进入精磨工序锯片的理论厚度时测量系统的理论测量值。标准锯片控制基准HS是通过事先加工一个满足尺寸要求的标准锯片,对其进行在线测量而获得的测量值。这样,根据HS和用户所设定的各工序加工余量,软件磨削控制器便可自动计算出光磨工序控制基准Hg和精磨工序控制基准Hj(各控制基准间尺寸关系如图1所示)。在磨削加工控制过程中,通过将测量值与各控制基准相对比较,便可间接获得锯片厚度值和确定磨削工序类型。
2 关键技术问题及解决方案
2.1 G代码程序与磨削控制器之间的协调控制机制
在采用G代码程序和软件磨削控制器共同协调实现控制的策略上,如何建立起两者相互之间的协调控制机制,是本系统开发中所要解决的主要问题。本系统的G代码程序采用宏变量编程的循环体系结构,G代码程序结构如图6所示。其中,G代码程序对软件磨削控制器的控制,采用了通过开发具有特殊功能的M代码的方式来实现。如特殊功能代码M103,实现了由G代码程序控制软件磨削控制器任务1的功能。其原理是:当数控系统的解释器解释到M103时,由PLC程序将全局变量R[294]置1,与此同时,软件磨削控制器检测到R[294]为1时,则执行任务1的功能。而软件磨削控制器对G代码程序的控制,是通过实时修改G代码程序中的宏变量指令值来实现的。G代码程序中设置的宏变量,有的可控制G代码程序的执行流程,有的本身就是运动指令值。这样,软件磨削控制器在修改宏变量时,便实现了对G代码程序执行流程的控制,以及对加工参数的调整。如宏变量#119,为磨削完成标志宏变量指令,当软件磨削控制器测量到锯片厚度值与锯片标准厚度之差在公差允许范围时,则实时修改#119的值为零,与此同时,当G代码执行到由#119的值为条件判断磨削加工循环是否结束的程序段时,由于#119已为零,则自动退出磨削循环加工,实现了磨削流程的控制。又如宏变量#115,为磨削初始点坐标值ZP1宏变量,此值由软件磨削控制器执行任务1后计算并修改。

2.2 磨削控制器对G代码程序的实时控制技术
在磨削循环过程中,如何实现软件磨削控制器对G代码程序控制的实时性,是本系统开发中所要解决的又一关键问题。如图6所示,当G代码在执行程序段N120时,由于解释器超前解释的特性,可能已完成了对程序段N160或其以后程序段的解释工作,这样就会将诸如#115、#119等宏变量的当前值读入缓冲区(此值一经读入便无法修改),而这些当前值并非磨削控制器执行完任务1后决定的值,从而失去了由外部信息对G代码程序控制的实时性。为此,本系统开发了能禁止解释器超前解释功能的特殊代码M17。在G代码程序中,可在由测量结果决定的宏变量值的程序段之前,加入M17代码,如图6所示。当数控系统解释器解释到M17代码时,便停止超前解释工作,这样就可保证解释器所解释的后面程序段中的宏变量,是由前面软件磨削控制器根据测量计算而决定和实时修改的值,实现了真正意义上的全闭环实时控制。
2.3 材料与温度漂移解决方案
电涡流位移传感器具有感应结果受材料与温度影响的缺点。本系统开发了相应的校正与补偿环节,以及时消除材料与温度带来的不良影响。
对不同材料的锯片,本系统提供灵活、方便的在线传感器线性标定功能。标定方法为:将要标定的锯片磨削出两个光整表面,在所开发的传感器线性标定界面中,通过按键分别获得传感器对两个表面距离的感应值(此值为传感器感应电压经A/D转换后的数字量),同时由用户输入两个表面厚度的差值,系统便可自动计算出此材料的线性比例系数。
由于标准锯片控制基准HS是在随机温度下的测量值,因此,当加工温度变化而引起传感器感应电压产生漂移而使测量值变化时,若控制基准HS仍保持不变,势必会导致软件磨削控制器产生控制误差。为此,本系统提供灵活的温度补偿功能,即提供控制基准HS的值可实时修调功能。修调方法为:在定期对磨削后的锯片进行检测时,一般为3~4 h检测一次,根据锯片厚度的偏移量,在控制基准HS中及时引入一个反向的温度修调值。由于通过对控制基准HS进行有效的温度补偿,从而消除了环境温度对本系统控制精度的不良影响,确保了锯片的尺寸精度。
3 加工数据与结果分析
应用全闭环锯片磨床进行磨削加工试验,锯片厚度测量值如表1所示。最大厚度误差不超过±0.015 mm,满足锯片厚度尺寸精度±0.05 mm的控制要求。
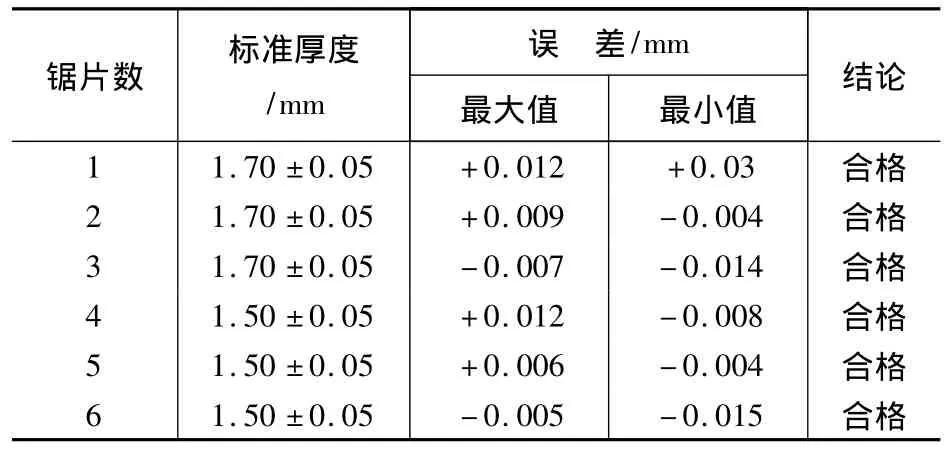
表1 锯片磨削厚度测量值
原开环控制数控磨削:单件双面磨削时间约2 min。每磨削锯片约5~7个后,须离线测量锯片厚度,凭经验修改砂轮磨损补偿值或G代码程序。在参数修改后,需对所加工的第一个锯片进行厚度检测,调整补偿参数。为此,需占用5~10 min加工时间。由于调整不及时或不准确,废品率为2% ~3%。
全闭环控制数控磨削:单件双面磨削时间约2 min,每工作3~4 h后,才需要对锯片厚度进行离线测量。如果需要才进行相应的锯片控制基准HS的修调,否则继续磨削加工。这种修调,主要是解决环境温度变化所引起的测量、加工误差。采用这种方法后,生产效率提高了30%,且有效地避免了废品的出现。
4 结语
基于电涡流传感器的全闭环锯片磨削数控系统,通过对锯片磨削厚度的在线实时测量,随时进行砂轮磨损补偿和准确地控制G代码程序的执行流程及有关参数,实现了磨削过程的全闭环控制。本文开发的数控系统,一者提高了磨削的精度和稳定性,二者提高了磨削效率和成品率,三者可实现在上一个锯片加工的基础上,无需对砂轮位置进行任何调整,就可以完成同规格锯片的批量加工。
1 张和平,余英良.经济型数控系统实现半闭环控制磨削加工[J].机电产品开发与创新,2007(2)
2 逄启寿,时国平.在线测量技术在数控机床的应用[J].机械工程与自动化,2006(2)
3 李金良,闫善全.自动磨削机磨削控制方法的研究[J].机械工程师,2001(9)
4 杨理践.大位移电涡流传感器的设计[J].仪表技术与传感器,2009(2)
5 刘君华.现代测试技术与测试系统设计[M].西安:西安交通大学出版社,1999.
6 刘广庆,翟继波.WAM336数控磨床的技术改造与工艺编程[J].工具技术,2002(5)
7 范晋伟,关佳亮.SMART—CNC超精密数控曲面磨床综合误差补偿技术[J].北京工业大学学报,2006(4)
