六端口技术的发展与应用
2010-09-27
(1.空军工程大学 导弹学院,陕西 三原 713800;2.毫米波国家重点实验室,江苏 南京 210096;3.桂林空军学院,广西 桂林 541003)
1 引 言
六端口技术最初应用于微波和毫米波测量以及网络分析仪。1972年,美国国家标准局Hoer等人提出六端口电路的概念并将它用于微波网络分析。他们利用定向耦合器和功率分配器等具有特殊性能的微波分支元件组成六端口电路,并将信号源和负载接入6个端口中的2个端口,结果发现通过测量4个输出端口上的电压幅度或功率,便可得到输入信号的幅度和相位信息[1]。这种电路结构简单,造价低,同时还具有多功能、宽频段、高精度、高速度和自动测量的优点。随后,Engen和Hoer证明了任意一个六端口网络在其4个输出端接上功率计后,则其2个输入端口的信号都可以用4个功率计读数的线性函数表示,且被测端口处的阻抗和反射系数也可以表示成标准常数与功率计读数乘积和的复数比,而他们在X频段所做实验的结果与传统的反射计测量的结果相一致。六端口技术在1977年取得了突破性的进展[2]。这一年发表了许多论文,比如Engen关于六端口技术的总结性文章,给出了六端口反射计的几何解释,并据此给出了最佳六端口结构设计准则;还有Weidman报告的5 070 GHz半自动网络分析仪的测试结果以及Hoer的双六端口自动网络分析仪理论。这些论文第一次系统地阐述了六端口的理论背景,并提供了六端口电路优化设计的指导准则,奠定了六端口技术的基础。
在保持宽频带、高精度、自动化的前提下,六端口技术直接采用任意的微波网络,用幅度测量代替相位测量,测量过程简单,并可以采用合适的校准程序来弥补硬件的非理想性,极大地降低了自动网络分析仪的成本和对微波元器件加工精度的要求[3]。如今六端口在微波网络测量以外的领域的应用也越来越广,典型的表现是将六端口电路用于直接变频接收机[4]。六端口电路通过直接解调得到中频信号,节省了混频器,减少了电路复杂性,从而使整个前端电路除了本振外,完全是由无源器件构成,体积小,便于集成,易于宽带工作。这些优点使得六端口接收机在软件无线电、波达方向、极化测量、雷达测速测距等方面得到了迅速的发展。
2 六端口测量技术
六端口测量技术是根据矢量分析原理,采用幅度测量代替相位测量来测量复反射系数的幅度和相位[2]。如图1所示,六端口系统是一个线性的6个端口的系统,一般情况下,其中一个端口接待测元件,一个端口接信号源,而剩下的4个端口接功率计(D1~D4)。其中待测元件的反射系数Г就是我们所要测量的值。由于六端口系统是线性系统,所以4个输出端口的电压均可以表示成2个输入端口电压的线性函数。取其中一个输出端口作为参考端口,另外3个输出端口的功率Pi与反射系数Γ的关系则可以用反射系数平面上的3个圆表示,圆心和半径都是π的函数,而Γ就是3个圆共同的交点,从而通过计算就可以得到待测元件的反射系数。
六端口测量技术发展迅速,已经有了很多的结构。Engen从对称性角度出发,给出了六端口系统最佳条件经验准则[3],即要使六端口系统能准确地测量复反射系数,最好使3个用来确定反射系数的圆的圆心120°对称地分布在反射系数平面上,且其矢径在1~2之间。但由于定向耦合器很难实现宽带的60°相移,所以六端口结构无法完全符合最佳条件经验准则,但是只要近似符合经验准则仍可以得到很高的测量精度。因此,可以在最佳条件经验准则的指导下,运用定向耦合器、功率分配器等微波元器件组成不同的六端口结构[4],而其中最常见的形式就是由1个功率分配器和3个定向耦合器所构成Engen的准理想六端口电路。
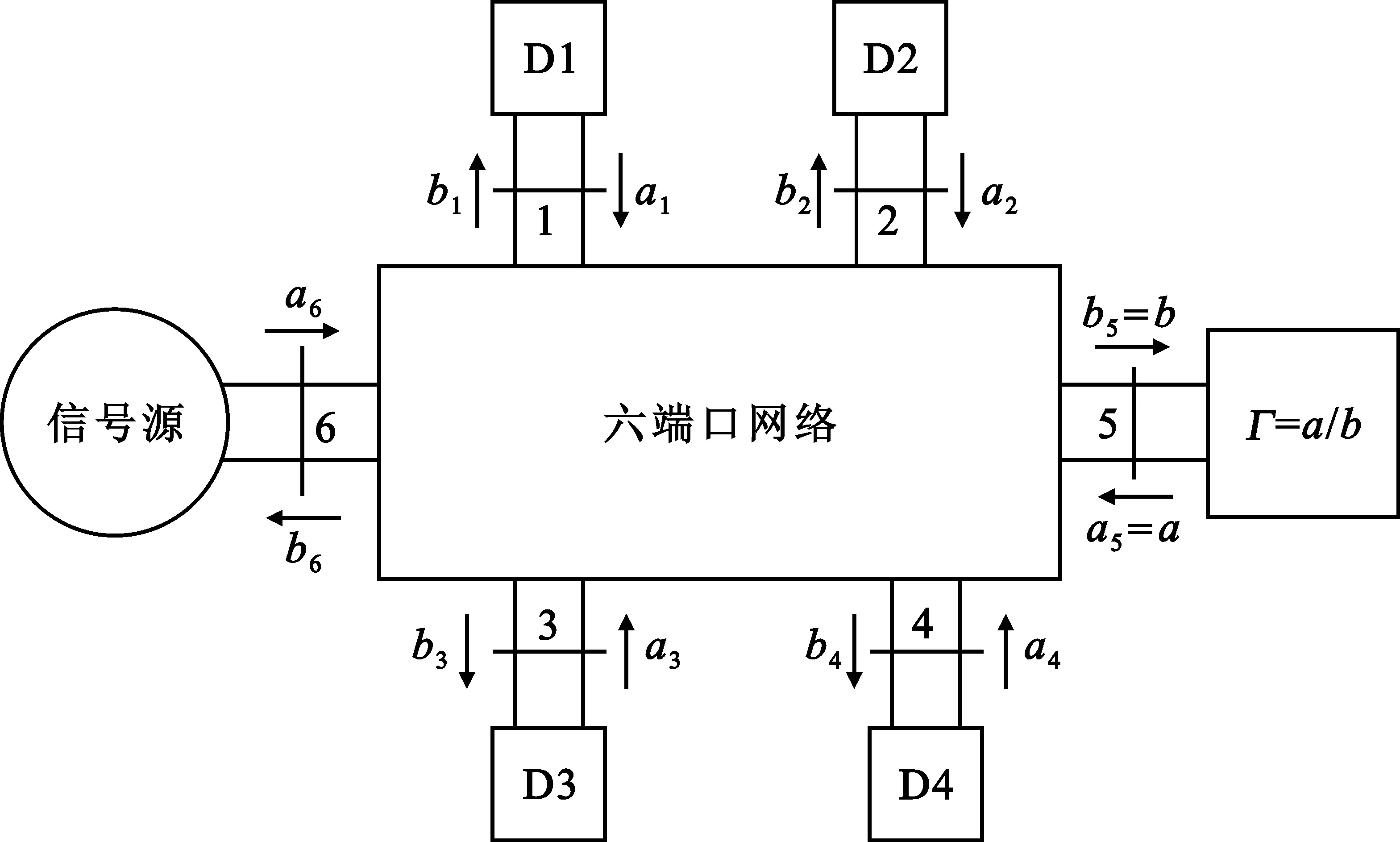
图1 六端口基本结构Fig.1 Structure of six-port
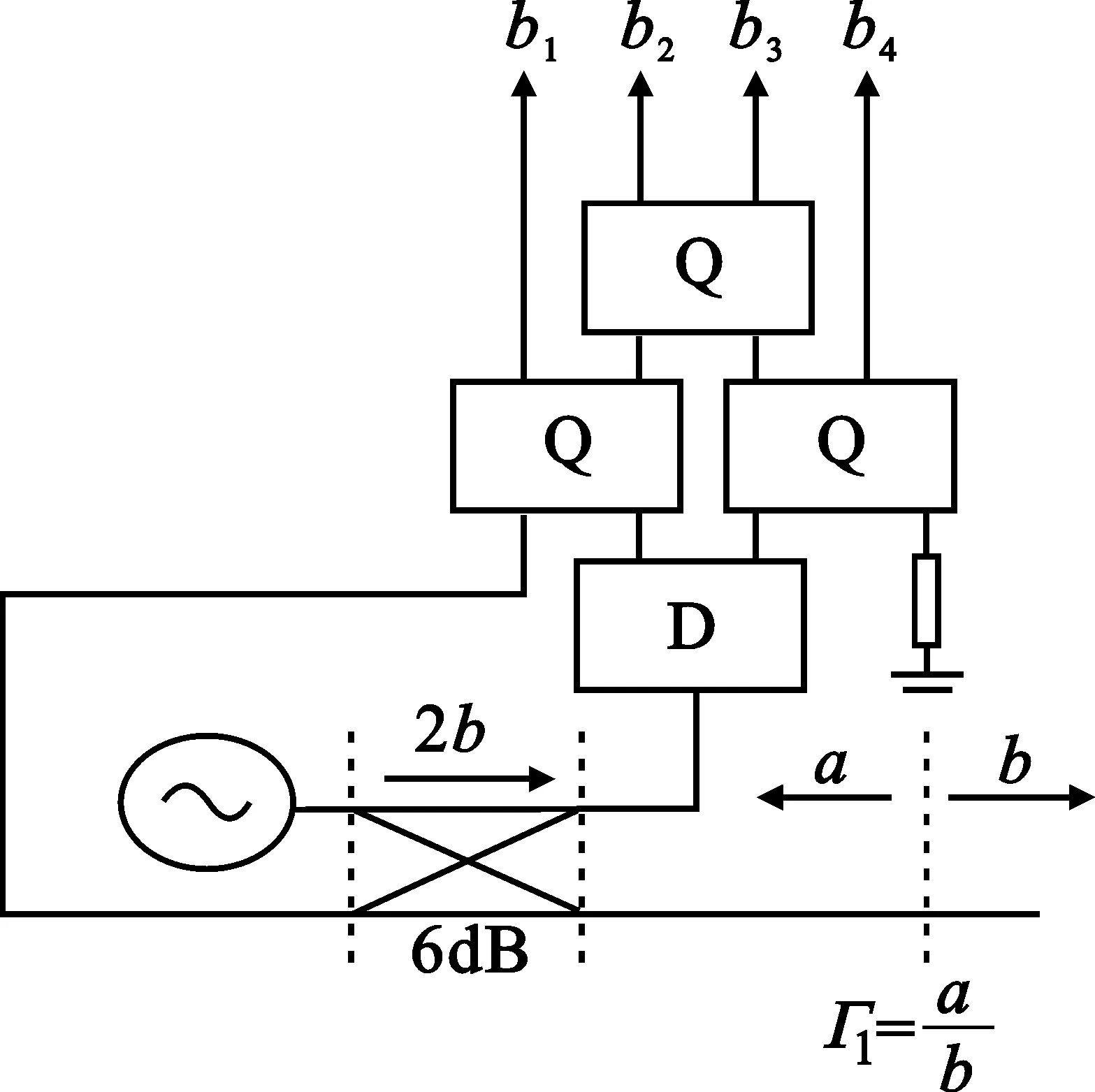
图2 Engen的准理想六端口电路Fig.2 Ideal six-port circuit of Engen
3 六端口的应用
利用六端口测量技术可以精确测量反射系数的相位这一特点,将其应用于接收机,认为接收信号是发射信号的反射波,测量接收信号与发射信号的相位关系,进而得到接收信号所包含的回波或通信信息[5-6];或者使用双接收天线和功分器,得到两路接收信号,进而测量两路接收信号之间的相位关系,从而得到波达方向和散射目标的散射特性[7-8]。
3.1 软件无线电
MSK(包括QPSK、16QAM等)通过载波信号的相位进行调制,使其相位变化包含通信信息,在接收机通过对接收到的信号进行解调,得出相位信息并进而得到通信信息。由于六端口测量技术具有精确的测量相位的能力,因此六端口直接变频接收机可以在射频对接收信号进行解调,从而得出接收信号的相位信息以及通信信息。不管是传统的超外差接收机,还是直接变频接收机和中频接收机,混频器和滤波器使得这些接收机在毫米波和亚毫米波频段价格昂贵且很难实现高的集成度。而六端口直接变频接收机则可以省去这些器件,从而可以大大简化电路的复杂度,实现高的集成度。与此同时,六端口直接变频接收机还可以应用数字信号处理技术,并将载波与时钟同步植入校准程序当中,实现多种调制方式和多模工作。
虽然六端口直接变频接收机的研究工作最早开始于20世纪90年代,但是取得的成就是令人瞩目的。X. Z. Xiong和V. F. Fusco实现了基于六端口技术的QPSK信号直接变频接收机,采用双频调校准,该接收机可以在0.9~5.0 GHz频带范围内对射频的数字调制信号进行解调,且工作频率低于3 GHz时的噪声系数小于3 dB, 由相位正交性所产生的相位误差低于2°[9]。Serioja O. Tatu和Emilia Moldovan等人实现了频段为26~28.5 GHz的六端口直接变频接收机,其芯片大小只有2 mm×3 mm,且应用载波恢复技术得到误码率低于1×10-6的动态范围超过60 dB[10]。张兰、冯科锦等人对射频六端口网络在射频上直接解调各类调制信号的普遍适用性进行了理论分析,并对QPSK、16QAM和π/4QPSK 3种调制制式使用计算机仿真对适用性进行了验证[11]。这些理论研究和试验结果证明了六端口网络解调MSK调制信号的优良性能。
3.2 波达方向
Toshiyuki Yakabe和Fengchao Xiao等人于2001年实现了工作于X频段的六端口波达方向测量系统[8],该系统使用双喇叭天线作为接收天线。实验测量结果与计算结果之间的偏差值低于0.42%,从而充分证明了六端口测量波达方向的可行性与精确度。
如图3所示,两个射频输入信号之间的相位差Δφ与路径差Δx之间的关系可以表示为
(1)
这样就可以由式(1)得到入射波的角度:
(2)
但是如果两个射频信号的路径差为零或为波长的整数倍,两个射频入射信号则会同相到达。因此,为了消除模糊度,两个接收天线的摆放间距d可选为半个工作波长。于是式(2)变为
(3)
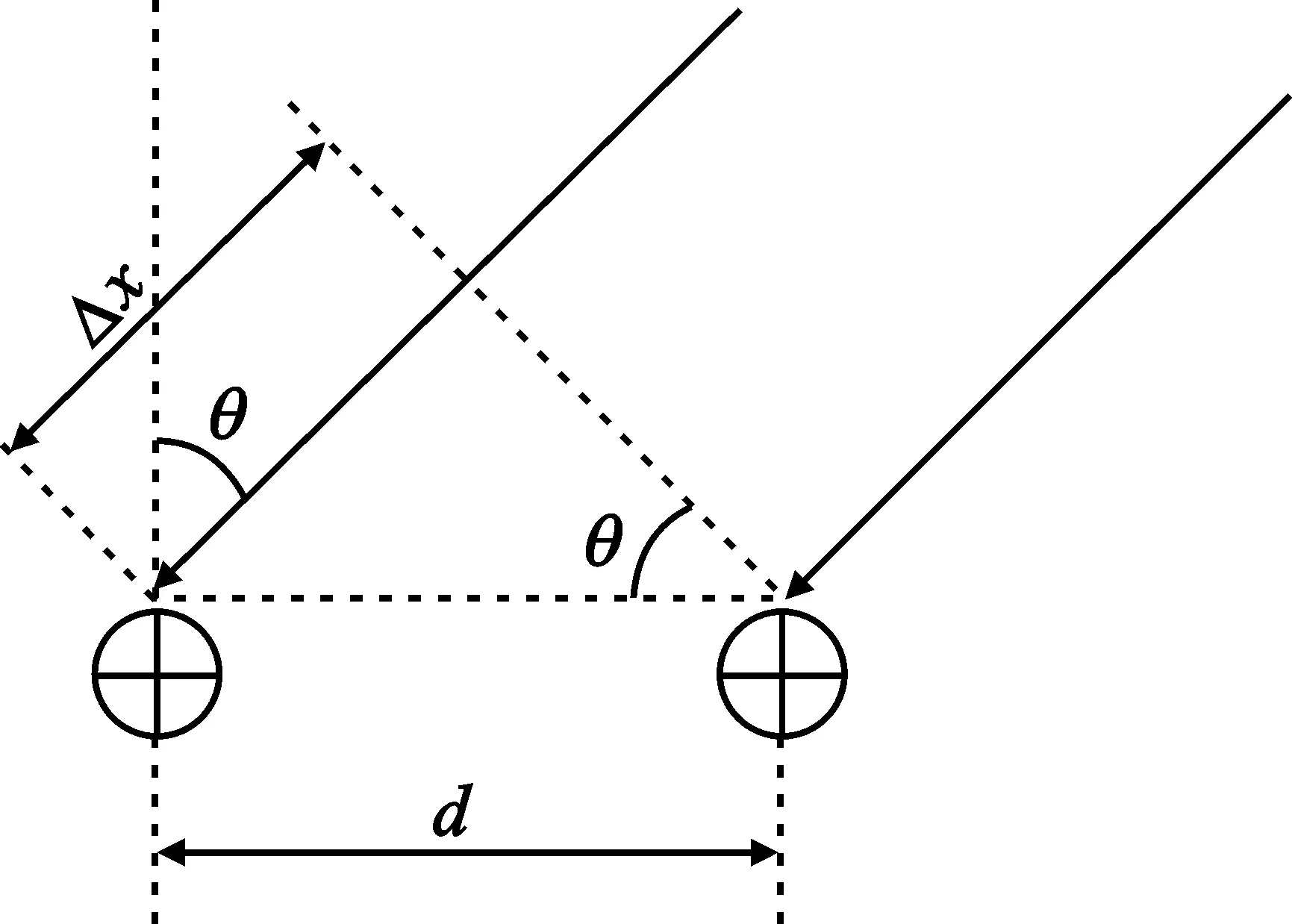
图3 几何模型平面示意图Fig.3 The schematic plan view of the geometrical model
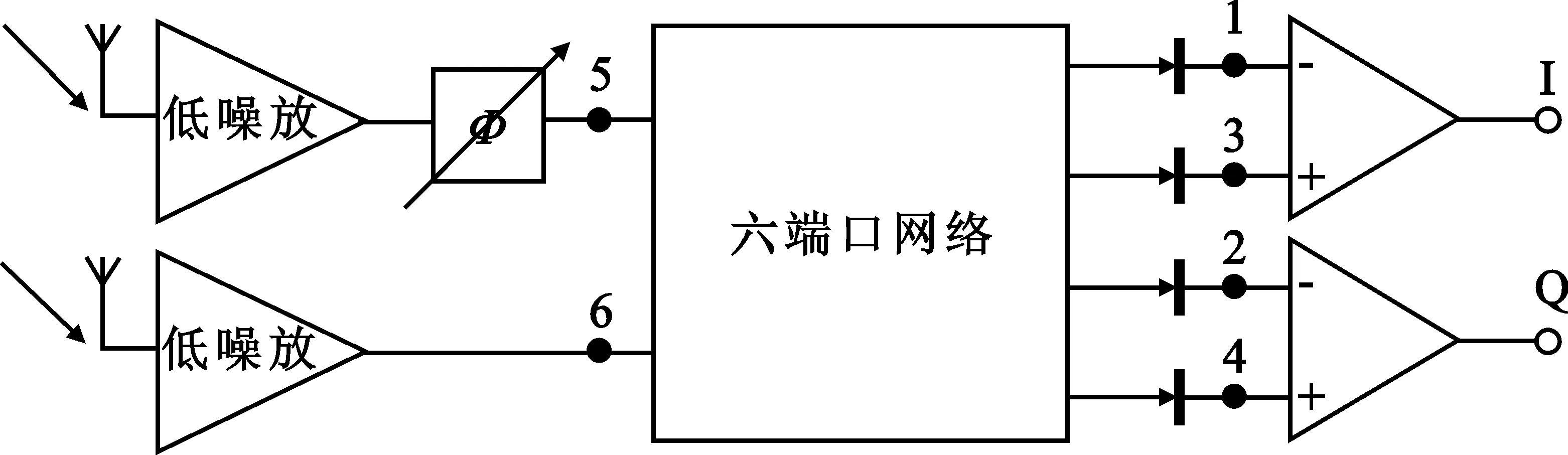
图4 六端口波达方向测量结构示意图Fig.4 The block diagram of the beam direction finding circuit
两路射频接收信号经过低噪声放大器输入到六端口射频电路的输入端口,经过检波、放大和信号处理并得到基带的复反射系数Γ,再根据式(3)就可以得到和波达方向有关的入射射频信号的相位差。其中如果矢量Γ的虚部为零,则两射频输入信号是同相输入。
两射频通道不可避免存在相位差,为了补偿这个相位差,需要在1通道插入一个可调移相器进行初始相位校准。基于六端口理论,初始相位校准后,当波束到达角θ=0°时,矢量Γ的虚部为零。相位差为零,Q支路的信号值为零这个结论提供了两种非常简单可行的测量方案[12]:一种是利用控制元件调节可调移相器得到Q支路最小值点的移相器相位,并与初始相位校准时的相位差进行计算从而得到波束方向。这种方法的优点是只需可调移相器控制电路和简单的计算,测量系统就可自动得到波束到达角度;另一种就是让整个波达方向测试系统或者仅接收天线在水平面内旋转,测试Q支路的最小值点对应的方向即为波束方向。这两种方法的优点是无需通过计算,直接用简单的电路即可测得波束到达角度。
3.3 极化与目标极化散射矩阵测量
借助双极化天线,六端口极化测量仪就可以测量入射波的极化状态,并且也可以用来测量散射目标极化散射矩阵。文献[7]提出的六端口极化测试系统可工作于7~17 GHz。
基于六端口分析理论,可以将六端口结构简化成四端口结构进行分析[3]。通过六端口结构的4个功率计的读数得到的反射计输出信号b的复比可以表示为
b=Mb′
(4)
式中,b′和b是六端口网络输入和输出信号;M是误差校正矩阵,由六端口的参数所决定。
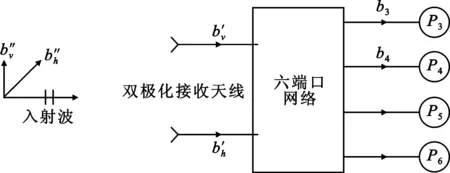
(a)六端口极化测量仪结构图
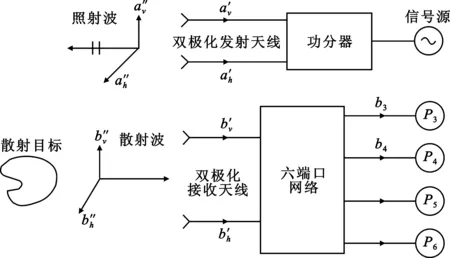
(b)六端口散射计结构图图5 六端口极化测量仪和散射计结构Fig.5 Structure of six-port polarmetric
(1)六端口极化测量仪

b=Mb′=MRb″=R′b″
(5)
式中,R是校准所得到的双极化接收天线的传输矩阵。所以入射波的垂直分量与水平分量组成的矩阵b″就可由b″=R′-1b决定,从而得到入射波的极化状态。
(2)六端口散射计
如图5(b)所示,六端口散射计的发射信号a′与接收信号b之间关系可以表示为
b=R′STa′
(6)
式中,T是双极化发射天线的传输矩阵,S就是需要测量的散射目标的极化散射矩阵。通常利用图5(b)中的功分器来得到3个已知极化的发射信号a′来确定R′ST。但在实际中很难产生已知极化的发射信号,所以文献[7]提出了一种新的不需要确定发射信号a′的极化状态就可以得到散射目标的极化散射矩阵的测量方法。实际发射信号a′和发射信号a的关系式为a′=Na,N是功分器环路的转移矩阵。式(6)就可以表示为
b=R′STNa=R′ST′a=Sma
(7)

(8)
展开为
(9)
3.4 六端口雷达测速测距
雷达是利用目标对电磁波的二次散射现象发现目标的,雷达回波信号包含了目标的距离、速度等信息。利用六端口系统可以准确测得反射系数Γl的模值和相角的特性,令回波信号与发射信号的比值为反射系数Γl,利用六端口系统来测量Γl,便可得到回波信号所包含的目标信息。
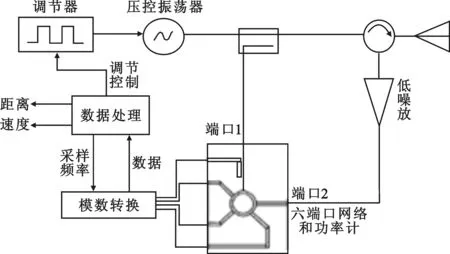
图6 六端口雷达结构示意图Fig.6 The schematic view of six-port radar structure
基于六端口技术的多普勒雷达使用发射机耦合过来的一部分发射信号和目标回波信号作为六端口结的两个输入信号。由推导可得目标回波信号反射系数为
Γl=(r/s)ej(ωdt-φ)
(10)
式中,|r|与|s|为接收信号与发射信号的幅度。由此可见,多普勒频率ωd表示Γl圆旋转的速率, 可以通过测量相同载波频率下两点相位差的变化率得到。因此,只要通过六端口系统测得反射系数的相位变化率,就可以得到目标的多普勒频率,进而得到目标的相对速度。而多普勒频率的正负则可由Γl圆的旋转方向决定。文献[13]表明,即使在超低速(0.2 mm/s) 环境中,这种基于六端口技术的多普勒雷达的测量精度也是可以接受的。
基于六端口技术的微波精确测距雷达也是恶劣环境中进行不接触测量的一个很好选择。六端口精确测距雷达采用数控步进调频连续波(FSCW),其目标距离的测量被分为两部分:首先,利用FMCW进行粗测,以消除距离模糊,并得到λ/4的测量精度;然后,利用CW进行精测,以提高测量精度。并通过频率计数器和压控振荡器控制发射机,对产生的信号频率进行修正以提高扫频的线性度。文献[14]中采用数控步进调频连续波(FSCW)的六端口雷达在0.5~1 m距离内的测距精度可以达到0.1 mm。
基于六端口技术的汽车防撞雷达也有很大优势。目前已有的防撞雷达中调频连续波雷达占了大多数,由于其射频结构简单,发射功率小,因而受到重视。但是在高精度高分辨率的要求下,FMCW雷达很难得到较高的调频线性度和较宽的调频范围,另外,无法确定目标相对运动的方向也阻碍了FMCW雷达的普及。而基于六端口技术的防撞雷达则可以克服这些缺点。六端口电路可以直接在射频进行测量,可以由单片微波集成电路进行集成,避免了采用昂贵的超外差式接收机和鉴相器,且在距离和相对速度的测量方面有着相当高的精确度。文献[15]表明工作频率为2 GHz、35 GHz、94 GHz的基于六端口技术的防撞雷达已经得到实现,体积小、成本低、较高的距离和相对速度的测量精度是它们共同的特点。
4 总 结
六端口测量技术用幅度测量代替相位测量,使得测量过程简单,且测量精度高,掀起了测量领域的一场革命。而六端口技术接收机可以直接在射频行测量,避免了采用昂贵的超外差式接收机和鉴相器。另外,六端口电路可以由单片微波集成电路进行集成,体积小,成本低。这些优点使得六端口接收机在软件无线电、波达方向、极化测量方面得到了迅速的发展。此外,六端口雷达作为一种新型的测速测距雷达,相比较传统测速测距雷达,在距离和相对速度的测量方面有着相当高的精确度,且体积小、成本低、易于集成,有着非常广阔的应用前景。
参考文献:
[1] Hoer C A. The Six-Port coupler: A New Approach to Measuring Voltage Current, Power, Impedance and Phase [J]. IEEE Transactions on Microwave Theory and Technology, 1972, 12(4): 466-470.
[2] Vladimir Bilik. Six-Port Measurement Technique: Principles, Impact, Applications[M]. Bratislava, Slovakia:Slovak University of Technology,1998.
[3] 汤世贤.微波测量(修订版)[M].北京:北京理工大学出版社,1992.
TANG Shi-xian. Microwave Measurement[M]. Beijing:Beijing University of Science and Technology Press,1992.(in Chinese)
[4] YU Jae-du, BAN Kyung-sig, Shin Choo-yeon,et al. Various six-port correlators using coupler and power divider[C]//Proceedings of the 2008 Second International Conference on Future Generation and Networking.Washington,DC:IEEE,2008: 445-448.
[5] Thomas Eireiner, Tobias Schnurr, Thomas Müller. Integration of a Six-Port Receiver for mm-Wave Communication[C]//Proceedings of IEEE Melecon.[S.l.]:IEEE,2006:371-376.
[6] 杨健,刘发林.六端口技术在雷达中的应用[J].雷达科学与技术,2005,3(2):71-76.
YANG Jian, LIU Fa-lin. A New Radar Based on Six-Port Technology[J]. Radar Science and Technology, 2005,3(2): 71-76.(in Chinese)
[7] CHEN Tzong-Jyh,CHU Tah-Hsiung. Calibration and Measurement of a Wideband Six-Port Polarimetric Measurement System[J]. IEEE Transactions on Antennas and Propagation, 1997, 45(7): 1080-1085.
[8] Toshiyuki Yakabe, Xiao Fengchao, Kenji Iwamoto, et al. Six-Port Based Wave-Correlator with Application to Beam Direction Finding[J]. IEEE Transactions on Microwave Theory and Techniques, 2001,50(2): 377-379.
[9] Xiong X Z,Fusco V F.Wideband 0.9GHz to 5GHz six-port and its application as digital modulation receiver[J].IEE Microwaves,Antennas and Propagation,2003,150(4):301-307.
[10] Serioja Ovidiu Tatu, Emilia Moldovan, Gailon Brehm, et al. Ka-Band Direct Digital Receiver[J]. IEEE Transactions on Microwave Theory and Techniques, 2002,50(11):2436-2442.
[11] 张兰,王兵,冯科锦.射频六端口网络在软件无线电中的应用[J].通信学报,2005, 26(9):79-84.
ZHANG Lan,WANG Bing,FENG Ke-jin. Application of microwave six-port in software radio[J]. Journal on Communiactions,2005, 26(9):79-84.(in Chinese)
[12] Serioja O Tatu,Tayeb A Denidni.A New Beam Direction Finding Circuit Based on Six Port Technology[C]//Proceedings of IEEE MTTS International Conference.New York,NC:IEEE,2005:581-584.
[13] XIAO Fengchao,Ghannouchi F M,Yakabe T.Application of a Six-Port Wave-Correlator for a Very Low Velocity Measurement Using the Doppler Effect[J].IEEE Transactions on Instrumentation and Measurement,2003,52(2):297-301.
[14] Andreas Stelzer, Christian Diskus, Kurt Lubke,et al. A Microwave Position Sensor with Submillimeter Accuracy[J]. IEEE Transactions on Microwave Theory and Techniques, 1999,47(12): 2621-2624.
[15] Emilia Moldovan, Serioja-Ovidiu Tatu, Tamara Gaman. A New 94-GHz Six-Port Collision-Avoidance Radar Sensor[J]. IEEE Transactions on Microwave Theory and Techniques, 2004, 52(3): 751-759.
