飞行模拟器电动式操纵负荷系统控制策略
2010-09-23付家才刘宪华马天楚
付家才, 刘宪华,, 马天楚
(1.黑龙江科技学院 电气与信息工程学院,哈尔滨 150027;2.哈尔滨飞行仿真技术研究所,哈尔滨 150001)
飞行模拟器电动式操纵负荷系统控制策略
付家才1, 刘宪华1,2, 马天楚2
(1.黑龙江科技学院 电气与信息工程学院,哈尔滨 150027;2.哈尔滨飞行仿真技术研究所,哈尔滨 150001)
操纵系统的控制策略是力伺服系统加载的关键技术。以电动式力伺服系统为加载方式的飞行模拟器操纵负荷系统,采用上位机力闭环 P ID控制、电流环 PI控制与多余力矩补偿相结合的策略实施控制。仿真结果显示:分别加入力闭环和电流环控制后,系统的超调量减小,跟随性能较好;采用角速度力矩补偿法,系统多余力矩下降了 90%。实际控制效果进一步表明,双环与力矩补偿相结合的复合控制策略可有效减小系统多余力矩,控制稳态误差。该研究可为构造操纵飞行模拟器负荷系统样机提供理论依据。
模拟器;伺服系统;电动式;复合控制;多余力矩
Abstract:The control strategies of control system hold the key technologies of force servo system loading.This paper proposes control strategies consisting of adoption of electric powered force servo system as loading mode of the flight simulator control loading system took,introduction of upper monitor force closed-loop P ID control,and combination of current loop PI control with combination of surplus torque compensation.The simulation results indicate that addition of force closed-loop and current control gives the system the s maller overshoot and better tracing;adoption of angular velocity torque compensation affords a 90%decrease in surplus torque.The actual control further shows that the control strategies combining double loops torque compensation allow an effective reduction in surplusof the system and better control of steady-state error.This research provides theoretical basis for constructing control loading flight simulator system model.
Key words:s imulator;servo system;electric powered;composite control;surplus torque
0 引 言
操纵负荷系统是半实物仿真不可或缺的重要设备。飞行模拟器操纵负荷系统主要用于仿真飞机横、纵向驾驶杆力和脚蹬力[1]。目前,国内外大型飞行模拟器人感仿真系统均采用力伺服系统加载方法。该加载方法的关键技术是操纵系统的控制策略。基于此,笔者针对飞行模拟器电动式操纵负荷系统,提出双环与多余力矩补偿相结合的复合控制策略,以期为构造操纵负荷系统样机提供理论依据。
1 系统结构
飞行模拟器电动式操纵负荷系统结构如图 1所示。该系统包括加载机构和控制系统两部分。加载机构由两通道加载部件和加载台体组成;控制系统由加载控制器、传感器调理模块、通讯模块和主控计算机组成。
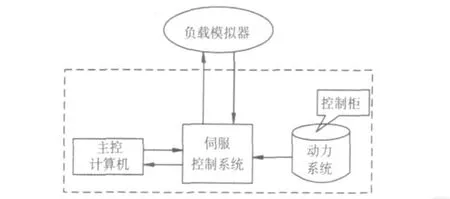
图 1 系统结构Fig.1 System structure
2 工作原理
以力矩加载系统为例说明操纵负荷系统工作原理。动态力矩加载器是以力矩为被调整量的电动伺服系统,是典型的被动式力矩控制系统。单通道加载器是动态力矩加载器的一种,主要通过主控计算机采集舵机转角信号,并将其转换成相应的力矩指令信号完成力矩伺服跟踪[2]。
图 2给出了典型的单通道力 (力矩)加载器工作原理。由图 2可见,舵机系统是加载对象,加载系统按照力函数发生器的指令对舵机系统加载。电机轴与舵机马达轴通过力矩传感器刚性连接。在舵机输入指令信号瞬间,加载系统的输入信号 Ur=0,力矩电机处于启动状态,但尚未转动。在舵机运动趋势作用下,力矩传感器输出多余力矩信号 Uf(Uf≠0),并将其反馈给加载系统,由加载控制器输出,经放大后驱动力矩电机加载,使力矩电机轴与舵机一起运动。舵机运动会产生角位移θf,其信号经电光学编码器测量输出,再经函数发生器变换成加载系统的输入力矩信号,此时,Ur=KUf(θf)。加载系统在 Ur和 Uf共同作用下通过加载控制器控制加载力矩电机对舵机加载。
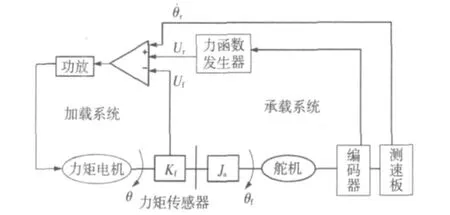
图 2 系统工作原理Fig.2 System work principle
3 控制策略
电动式操纵负荷系统采用直驱力矩电机加载。根据直驱伺服电机的力矩控制特点,采用双环与多余力矩补偿的复合控制策略,即外环采用力闭环P ID控制,内环采用电流环 PI控制,多余力矩采用速度补偿法[3]。系统控制框图如图 3所示。
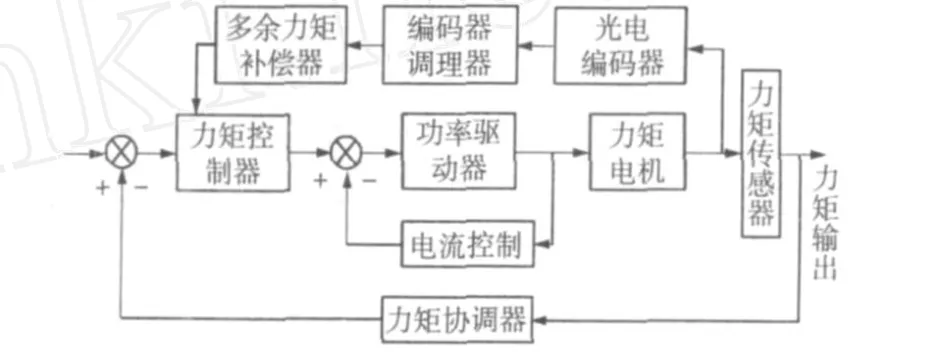
图 3 系统控制框图Fig.3 System control diagram
3.1 力闭环 PI D控制
力闭环利用电压信号控制电机转矩。控制过程中,反馈信号由力矩传感器检测,经变送器形成标准电压信号,再由采集卡输入上位机 (工控机)。力矩控制器采用数字 P ID控制器。它将偏差信号的比例、积分、微分各分量线性组合成控制量,以控制被控对象,实现数字 P ID控制。传递函数为
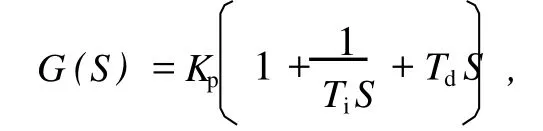
式中:Kp——比例系数;
Ti——积分时间常数;
Td——微分时间常数;
S ——复变量。
力闭环 P ID控制比例环节成比例反映控制系统的偏差信号,偏差一旦产生,控制器即产生控制作用。积分环节主要消除静差,提高系统的无差度。微分环节主要反映偏差信号的变化规律,在系统偏差信号变大之前引入一个有效的早期修正信号,以加快系统的响应速度,减少调节时间,提高系统的稳定性。
3.2 电流环 PI控制
直驱力矩电机全电压启动时,会产生很大的冲击电流。为使电流低于允许值,在系统中加入电流环,并引入电流负反馈控制即 PI控制。传递函数为
电流环 PI控制比例环节和积分环节的作用与力闭环 P ID控制相同。系统电流内环的响应频带在 1 kHz以上。为充分利用电机允许过载能力,在过渡过程中,电流一直保持最大值,使系统尽可能以大的加 (减)速度起 (制)动,以获得快速动态响应。在稳态时,电流立即降下来,使电机的电磁力矩与负载力矩相平衡,从而获得较大的系统响应频宽[4]。
3.3 多余力矩补偿
电动力矩加载器是典型的位置扰动型力矩伺服系统。加载系统由于受到舵面系统的强位置干扰而输出很大的扰动力矩,即多余力矩[5]。它严重影响电动力加载器的加载准确度。多余力距的大小与舵机马达的运动角速度成正比。因此,文中采用角速度补偿消除多余力矩。由图 2可知,在力加载系统中,实际运动角速度由安装在舵机马达转轴上的光电编码器得到,并由测速板检测出后输入给加载系统的力矩电机,使加载力矩电机与舵机保持同步,以达到消除多余力矩的目的。角速度补偿消除多余力矩控制原理如图 4所示。
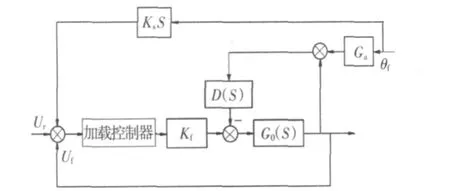
图 4 角速度补偿消除多余力矩控制原理Fig.4 Speed compensation el im inate redundant torque control principle
4 仿 真
采用MATLAB/Simulink软件仿真分别加入力闭环 P ID控制、电流环 PI控制后的系统性能,如图5、6所示。由力矩跟踪曲线 (图 5)可以看出,加入力闭环后系统力矩的期望值与实际值更接近,超调量减小,相位滞后明显改善,跟随性能较好。
由系统阶跃响应函数曲线 (图 6)可以看出,电流负反馈 PI控制与常规控制相比,参数调整快,超调量小,系统的响应速度和动静态性能高。
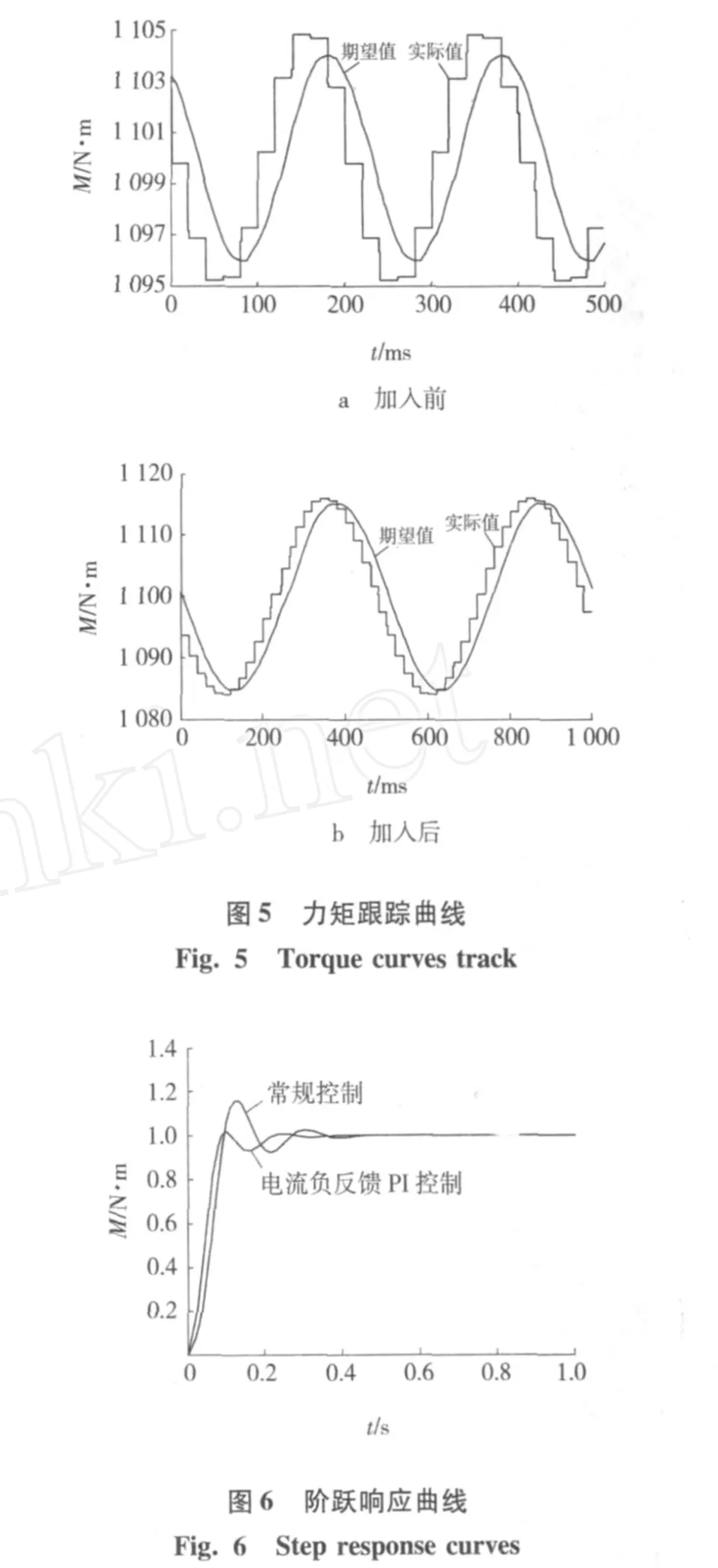
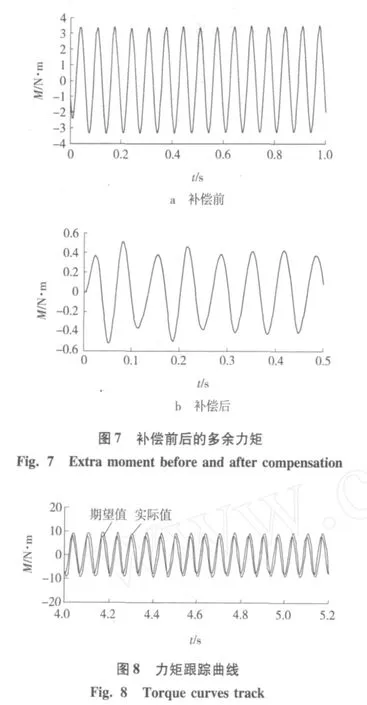
图 7显示了角速度法消除多余力矩的效果。从图中可以看出,补偿前多余力矩变化区间为 -4~4 N·m,补偿后下降到 -0.5~0.5 N·m,下降了90%。可见,角速度法可有效减小多余力矩。
取加载力矩幅值为 8 N·m,频率为 8 Hz,时间为4 s,利用VC测试软件检测采用双环和多余力矩补偿复合控制策略的系统的力矩变化情况,如图 8所示。
由图 8可见,力矩实际值与期望值相比,幅值变化了 -0.13%~0.13%,相角滞后 1.44°。两者跟踪误差为 2.48%,说明实际力矩跟踪效果较好。
综上所述,力闭环 P ID控制、电流环 PI控制与多余力矩补偿的复合控制略可以有效消除飞行器电动式操纵负荷系统多余力矩,控制系统的稳态误差。
5 结束语
操纵系统的控制策略是力伺服系统加载的关键技术。笔者结合飞机模拟器电动式操纵负荷加载系统结构及工作原理,提出采用上位机力闭环、电流环控制与多余力矩补偿相结合的复合控制策略。仿真结果验证了复合控制策略消除多余力矩的有效性。该研究可为构建飞机模拟器操纵负荷系统样机提供理论支持。
[1] 刘长华,徐亚军.应用于飞行模拟器的电动伺服加载系统[J].重庆工学院学报,2005,19(5):38-40.
[2] 张 靖,刘少强.检测技术与系统设计[M].北京:中国电力出版社,2002.
[3] 邹海峰,孙 力,阎 杰.飞行器舵机电动伺服加载系统研究[J].系统仿真学报,2004,16(4):657-659.
[4] 徐小英,王 林.RT-LAB快速控制原型在随动系统的应用[J].系统仿真学报,2006,18(4):1 055-1 057.
[5] 刘长华.飞行模拟器数字式操纵负荷系统的仿真及实现[J].中国民航飞行学院学报,2005,16(3):11-13.
(编辑 荀海鑫)
Control strategies of electric powered control load ing system in flight s imulator
FU Jiacai1, L IU X ianhua1,2, MA Tianchu2
(1.College of Electric&Infor mation Engineering,Heilongjiang Institute of Science&Technology,Harbin 150027,China;2.Harbin Institute of Flight Simulation Technology,Harbin 150001,China)
T M921.541
A
1671-0118(2010)05-0367-04
2010-08-24
付家才 (1954-),男,山东省肥城人,教授,研究方向:现代矿山电气控制,E-mail:fjc5404@163.com。
