筒式磁流变液联轴器设计与实验研究
2010-09-14李名杰李友荣鲁光涛宋钢兵
李名杰,吕 勇,李友荣,鲁光涛,宋钢兵,2
(1.武汉科技大学冶金装备及其控制教育部重点实验室,中国武汉,430081; 2.休斯顿大学智能材料与结构实验室,美国休斯顿,77004)
筒式磁流变液联轴器设计与实验研究
李名杰1,吕 勇1,李友荣1,鲁光涛1,宋钢兵1,2
(1.武汉科技大学冶金装备及其控制教育部重点实验室,中国武汉,430081; 2.休斯顿大学智能材料与结构实验室,美国休斯顿,77004)
讨论结构设计、外加磁场、输入转速和转矩对MRF联轴器传动扭矩的影响。在Bingham模型基础上,通过理论计算,得出筒式结构扭矩传递值在工作间隙减小过程中趋于某一极限值结论,按此结论设计出传动实验装置,通过实验对筒式磁流变液连轴器的输出性能进行验证,所得实验结果与理论推导结果相吻合。
磁流变液;联轴器;筒式结构
磁流变液(MRF)是一类新型智能材料,它是由饱和磁感应强度高矫顽力小的软磁微粒分散于不导磁油液中所形成的一种悬浊液。在外加磁场下,该悬浊液的结构和性能会发生瞬间改变,其粘滞系数因大数量级的增加而表现出类固体性能,该类固体的屈服强度随外加磁场变化而变化。MRF用于扭矩的研制目前有:Bansbach[1]设计的多片式和双盘式磁流变转矩传递装置;Gopalswamy[2]等关于降低风扇离合器磁阻的MRF离合器设想;Hamp ton[3]设计的小间隙和高磁通量密度的M RF联轴器;Carlson[4]关于与飞轮做成一体的M RF制动器设想;Kavlicoglu[5]关于双圆盘式大转矩磁流变离合器的实验(转矩为7.9 N·m);中国科技大学试制的带加压装置的M RF离合器(实验转矩为7 N·m)。然而,上述诸研制的不足是装置传递的扭矩值较低。
本文就MRF联轴器用于重载传动辊道冲击减震和离合控制问题,讨论结构设计等因素对MRF传动扭矩的影响,并制作相应实验平台,验证磁流变液联轴器(MRC)的输出性能。
1 M RC设计理论
1.1 本构模型
M RC利用磁流变液智能材料在剪切模式下的工作性能,利用MRF联轴器传动、减震、缓冲、离合等的“智能”特性在两传动轴之间进行能量传递。MRC中的磁流变液在无外加磁场作用时表现为牛顿流体,当施加外加磁场后,在极短时间内(数毫秒)表现为宾汉姆(Bingham)流体。而Bingham流体模型[6]描述的是低剪切速率下的磁流变液宏观力学行为,其本构模型为

式中:τ为磁流变液剪切应力;τB为磁流变液磁性颗粒在磁场作用下产生的剪切屈服应力;η为磁流变液动力黏度系数;γ·为磁流变液的剪应变率。
1.2 筒式MRC理论设计公式
筒式M RC结构示意图如图1所示。按照磁流变液在筒形区域流动特性,依据本构模型进行计算,得出在屈服区域磁流变液传递转矩为[7]服应力传递转矩 TMa和黏性力传递转矩 Tηa两部分组成,分别为

图1 筒式M RC结构示意图Fig.1 Schematic diagram of cylindrical M RC structure

1.3 扭矩理论分析
很少有研究者在依据上述扭矩传递公式进行结构设计时对其作进一步的讨论,为此,本文对式(2)作进一步推导。联轴器所传递的扭矩由磁场引起屈服应力所产生的扭矩 TMb和磁流变液黏性力所产生的扭矩 Tηb两部分组成,其中黏性力所产生的扭矩不受磁场的影响,磁场引起屈服应力所产生的扭矩起决定作用,磁流变液联轴器所能传递的最大负载扭矩由磁场强度决定。磁场引起的剪切应力扭矩可由式(3)计算,令 x=R1/R2,则式(3)简化为

上述分析结果基于如下假定:结构上两筒之间的距离无限缩小,磁场引起的屈服应力扭矩趋近于极限值2πτBLR21。本研究所讨论的MRC两筒间距为0.6 mm,R1为50.6 mm,R2为50 mm,从而满足 R1≈R2这一条件 。
2 M RC样机与实验装置设计
2.1 MRC样机设计
筒式磁流变液联轴器主机由转动、磁流变液、线圈部分、润滑密封和支承结构5部分组成,其纵切面示意图如图2所示。
2.2 实验装置设计
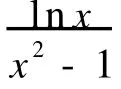
MRC的主动轴、从动轴分别与变频电机和负载(磁粉制动器)联结,通过工业控制机调节电机转速、负载大小以控制MRC的工作负载,并通过两个ZJ扭矩传感器测量M RC主从动轴的转速和扭矩,所测得的数据通过扭矩测量卡存入工业控制机。MRC实验框图、M RC实验装置图分别如图3、图4所示。
2.3 M RC实验装置主要部分

图2 M RC纵切面示意图Fig.2 M RC sectional drawing
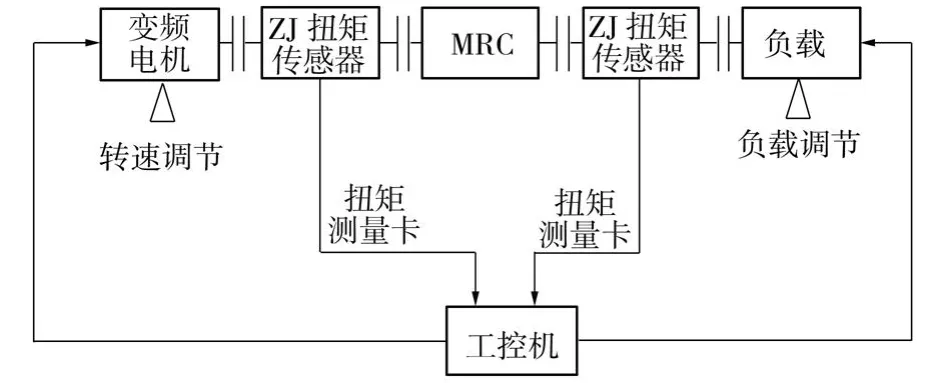
图3 M RC实验框图Fig.3 M RC test diagram
图4 M RC实验装置图Fig.4 M RC experimental equipment
MRC实验装置主要组成部分为:①磁流变液联轴器样机(见图4);②动力输入部分:三相感应变频电机(额定功率0.55 kW,输入电压380 V,同步转速1 500 r/min);变频器(输入规格AC 3PH380~460 V、50/60 Hz,输出规格AC 0~240 V、1.7 kVA、4.5 A,变频范围2~200 Hz);③数据采集部分:ZJ10型转矩转速传感器(额定转矩10 N·m,转速 0~6 000 r/min);ZJ50型转矩转速传感器(额定转矩50 N·m,转速0~5 000 r/min);TC-1转矩转速测试卡(扭矩测试精度+0.2%FS);PC-400数据采集控制卡;④数据显示部分:为本实验台专门开发的数据采集程序及界面显示程序,可直接在W INDOWS环境下进行数据结果显示。⑤负载装置部分:FZ-5型磁粉制动(加载)器,其额定转矩为50 N·m,激磁电流为0~2 A,允许滑差功率为1.1 kW。
3 实验验证
3.1 实验内容
负载特性曲线:研究在一定的输入转速和输入电流条件下,输出扭矩与输出速度间的关系,当调解负载端制动力矩使其增大时,输出转速将发生变化,其中,固定电流为2A,输入转速为1 000 r/min。
临界制动扭矩输出特性曲线:研究不同输入速度下临界扭矩与输入电流间的关系,其中临界扭矩是评判MRC性能的主要参数。
3.2 实验结果与讨论
MRC负载特性曲线和临界制动扭矩输出特性曲线分别如图5、图6所示。

图5 M RC负载特性曲线Fig.5 Loading characteristic curve of M RC
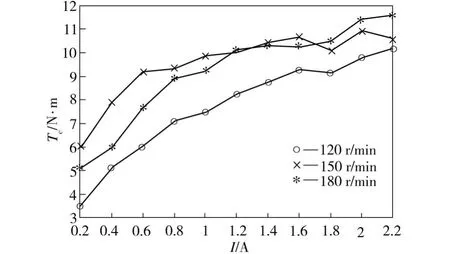
图6 M RC临界制动扭矩输出特性曲线Fig.6 Critical braking torque output characteristic curve of M RC
从图5中可看出,MRC在低速区(40~120 r/min)扭矩提升较快,在高速区(140 r/min以上)扭矩变化不大。因此,要想获得良好的扭矩提升性能,应使MRC尽量工作在低速区。这是因为,当M RC输入端转速过高时,液体的剪切速率很大,而输出端负载转矩随转速的变化较小,也就是说M RC在低速区的制动效果要好于高速区的制动效果。这种变化规律与M RF液体本身的剪切应力特性是对应的。从图6中可以看出,输入电流是影响临界制动扭矩大小的主要因素,这与MRF特性相对应。当电流超过一定值后,磁流变液联轴器工作磁场出现饱和状态,实测扭矩值开始趋于某一确定值。此外,最大传递扭矩值也与输入端的传递速度有关,180 r/min时所传递的扭矩值明显高于120 r/min所传递的扭矩值,这是因为磁流变液材料具有黏性。式(2)中联轴器传递的扭矩黏性力部分包含了转速差分量,并在实验中验证了利用Bingham模型推导出的理论公式的正确性。
4 结论
(1)筒式M RC动态屈服应力扭矩在理论上趋于某一确定的极限值,即称为临界扭矩值, MRC联轴器有效工作条件是,其负载扭矩值不得大于M RC固有的临界扭矩值。
(2)筒式M RC输出扭矩与输入电流呈非线性变化关系,MRF联轴器在低速区扭矩提升幅度较大,在高速区扭矩提升幅度较小。为获得良好的扭矩提升性能,应尽量使MRC工作在低速区。
[1] Bansbach E E.Torque transfer apparatus using magnetorheological fluids:US,5,779,013[P]. 1998-1 2-08.
[2] Gopalswamy S,Linzell S M,Jones G L.Magnetorheological fluid clutch w ith minimized reluctance: US,5,845,752[P].1998-12-08.
[3] Hamp ton K.Magnetorheological fluid coup ling:US, 5,967,273[P].1999-10-19.
[4] Carlson J D.Magneto rheological brake w ith integrated flyw heel:US,6,186,290B1[P].2001-02-13.
[5] Kavlicoglu B,Go rdaninejad M F,Evrensel C A,et al.A high-torque magneto-rheological fluid clutch [C]∥Proceedings of SPIE Conference on Smart Materials and Structures.San Diego,2002.
[6] Usob Lee,Doh Y K,Nahmkeon H.Design analysis and experimental evaluation of an MR fluid cluth [J].Journal of Intelligent Material System s and Structures,1999,10(9):701-707.
[7] Huang J,Zhang JQ,Yang Y,et al.Analysis and design of a cylindrical magneto-rheological fluid brake [J].Journal of Materials Processing Technology, 2002,129:559-562.
Design and experimen tal study of cylindrical M RF coupling
L i M ingjie1,L u Yong1,L i Yourong1,Lu Guangtao1,Song Gangbing1,2
(1.Key Labo rato ry fo r Metallurgical Equipment and Control of M inistry of Education, Wuhan University of Science and Technology,Wuhan 430081,China;2.Smart Materials and Structures Labo ratory,Department of Mechanical Engineering,University of Houston,Houston,USA)
This paper discusses the influence of structural design,externalmagnetic field,input speed and torque on the driving torque of M RF coup ling.On the basis of Bingham model and theoretical computation,it concludes that the torque transmitting value of the cylindrical structure decreases tow ards a certain limit value in the intervals of its operation.Transm ission experiment equipment w as designed based on the deduced conclusion,and the evaluation of the output perfo rmance of cylindrical MRF coup ling confirm s that theoretical findings are consistent w ith the experimental results.
MRF;coup ling;cylinder structure
U 463.211+.1
A
1674-3644(2010)06-0624-04
[责任编辑 彭金旺]
2010-05-04
湖北省教育厅科学技术研究计划重大项目(Z20091101).
李名杰(1985-),男,武汉科技大学硕士生.E-mail:limingjie8576@163.com
李友荣(1946-),男,武汉科技大学教授,博士生导师.E-mail:liyourong@wust.edu.cn
