基于红外光点捕获系统实现抓举技术的快速反馈
2010-09-14伍勰
伍 勰
基于红外光点捕获系统实现抓举技术的快速反馈
伍 勰
目的:以举重抓举动作技术的快速反馈为实现目标,探索解决由于技术指标结果反馈周期过长而造成运动技术分析在科研服务中的实际效果欠佳的问题。方法:利用V ICON红外光点捕获系统,同步采集抓举动作的三维运动学及地面反作用力数据并导入至自编的分析软件进行实时运动模式识别与数据修补,快速再现抓举动作的三维棍图与一系列相关的技术指标。结果:通过对两名优秀举重运动员共计20次抓举动作的反馈测试表明,所建立的抓举运动模式识别方法准确有效、反馈用时短,能满足技术训练的实践需求。结论:在红外光点捕获系统的硬件基础上开发相应的自动识别与反馈系统是一种值得尝试的运动技术分析方法,有较好的应用前景。
举重;抓举;技术;红外光点捕获系统;快速反馈
1 前言
在运动生物力学应用领域中,一项重要的任务就是利用各种先进的测量手段和方法来分析运动员的动作技术从而帮助他们改进技术,提高运动成绩。在动作技术分析过程中,最为基本的三个步骤包括数据采集、计算分析和结果反馈。由于这三个步骤都需要占用一定的时间,使得技术分析结果往往要经过较长时间(几天甚至几周)才能反馈到教练员手中,这就大大降低了技术分析的实践应用价值,特别是对于那些需要对动作技术进行改进的运动员,如果能在技术训练课中快速地给予技术反馈,无疑将对运动员建立良好技术的动力定型产生积极的效果。
为实现动作技术的快速反馈,关键是解决人体运动的自动跟踪与识别问题。王向东[5]曾利用灰度识别技术对抓举视频图像中的杠铃端点进行了自动识别,刘国翌等[4]提出了一种基于优化框架并融合多种图像特征的三维人体运动跟踪算法来对举重动作进行了三维重建。然而,基于视频图像的自动跟踪与识别在技术上存在很大的难度,且得到的是某种数学优化的结果,因此,在跟踪准确性及识别精度方面仍未能很好地满足实际应用的需求,也正是这个原因。近年来,利用红外光点运动捕获系统对人体运动进行三维运动学采集已逐渐普遍,这类系统的最大优点在于能自动实时跟踪布置于人体上的反光Marker球的三维空间位置,从而大大缩短了获取原始运动学坐标数据的时间,而且精度也远高于在运动序列图片上进行人工标定关节点位置的传统方法。然而,要借助红外光点运动捕获系统平台来真正实现动作技术的快速反馈仍需解决两个技术问题,一是,Marker球的自动识别(运动模式识别)问题,虽然红外光点捕获系统能自动跟踪Marker球,然而,所有布置于人体上的Marker球都必须在数据采集结束后逐一进行人工标识(Label),并要对数据采集过程中由于各种原因所引起的跟踪中断和光点串扰等情况进行人工修复与处理,这一过程往往需要花费较长的时间才能完成。另一项必须的工作是建立针对性的动作技术指标体系,由于当前所有的运动分析商用软件都是属于通用性软件,很少有专门针对某项具体运动项目的独立分析模块(除有些软件带有步态分析模块外),所以,要想实现动作技术的快速反馈,还必须建立针对性的技术指标评价体系和分析模块。
考虑到举重是一种室内项目,可满足红外光点捕获系统的工作环境要求。同时,举重项目一直是我国传统的优势项目之一,而且,其抓举动作技术要求高,建立抓举动作技术的快速反馈系统在可行性与应用性两方面都有着较好的现实意义。
2 研究方法
2.1 基本技术路线
抓举动作技术快速反馈的实现方案见图1。测量设备包括8台V ICON MX13红外光点捕获系统和1台与之同步测量的Kistler 9287B三维测力台,将测力台嵌入至举重台中央镂空部分(两者表面平齐),并固定于地面。V ICON拍摄频率为250 Hz,测力台的采样频率为1 250 Hz。动作过程的运动学数据进行三维重建后形成C3D文件(国际标准的运动生物力学测试数据文件格式),将C3D文件导入至自编软件进行运动模式识别及数据修补,最后快速反馈三维棍图及一系列相关的技术指标。选取4名优秀举重运动员(男、女各2名)作为实验对象,在举重台上完成不同重量(男:40~80 kg,女:30~65 kg)的抓举动作。实验分为两个阶段,第一阶段,选取2名运动员(男、女各1名)进行实验,所采集的动作数据主要为程序调试服务,即针对抓举动作的运动学特征完善程序中有关运动模式识别的工作;第二阶段,选取另2名运动员进行实验,目的为考察反馈系统的整体稳定性与实时性。软件系统利用OpenGL与VC++6.0编制完成。
2.2 Marker球的配置
在人体上粘附反光Marker球(标志点)是红外光点捕获系统工作原理的需求,人体模型的选择与研究目标的设定直接决定着Marker球的配置方案。本研究在计算人体总重心位置时采用Dempster等人的人体测量学参数[10],按相应的环节定义在主要关节的两侧骨性标志处粘附Marker球,用于确定关节中心位置(图2)。头部、踝部与足面上的Marker球分别粘贴于弹力头带、运动袜及举重鞋表面,其余Marker球均直接粘附于皮肤表面,由于举重动作速率相对较慢、活动范围小,在运动员身体关节处粘贴Marker球并不对运动本身造成过多妨碍。为考察杠铃的运动,杠铃杆两端也被粘贴了Marker球。这样,整个反馈系统的Marker球配置共包含了28个Marker球(直径为14 mm)。
需要指出的是,在人体运动过程中由于关节处皮肤的运动会导致Marker球的位置偏差,一些学者推荐采用区分标定Marker与跟踪Marker的方法对一个具体的动作对象实施静态捕捉与动态捕捉两次测试,来减小这种偏差[11]。但考虑到快速反馈的时间要求,同时也考虑到举重动作本身的运动速度相对较慢的特点,图2所示的Marker球在运动过程中的这种位置偏差将被忽略。

图1 抓举动作快速反馈系统的基本工作流程图Figure 1. The Basic Working Procedures of Quick Feedback System for Snatch Technique

图2 抓举动作的Marker球配置方案图Figure 2. The Marker Set Configuration for Snatching Action

图3 抓举提铃阶段开始瞬间的Marker球位置分布(前视)图Figure 3. The Spatial Position of Markers at Onset of Snatching Action(frontal view)
2.3 运动模式识别与数据修补
所谓运动模式识别在本研究中就是指根据抓举动作的运动学特征,通过计算机程序对所Marker球进行自动识别的过程,这个工作也是本研究最为关键的技术环节。在运动过程中,由于红外光点捕获系统本身硬件能力的不足或由于肢体遮挡的原因会造成Marker球跟踪中断,当某一Marker球出现跟踪中断并再次被捕获时,采集系统将为其重新开设新的数据通道来纪录后续的数据,其默认的标识名称也随之更改,因此,一个Marker球在运动过程中可能会产生多个数据片断并分散在不同的数据通道中,确定所有数据通道的Marker球归属就是运动模式识别的具体任务。本研究在模式识别中所采用的基本方法如下: 1)根据杠铃长度及杠铃片半径等参数寻找杠铃端点Marker球,并将杠铃端点开始运动时刻设为整个抓举动作的起始帧(图3);2)根据第一阶段实验数据(本研究第一阶段的数据样本为30例)建立各Marker球的基本运动学特征曲线及相对位置关系,通过拟合比对的方法对运动过程中的Marker球进行识别。在Marker球识别过程中,剔除“鬼点”(ghost)也是必须的工作。所谓“鬼点”是指除真实Marker球外,由于红外线反射异常所形成的冗余点,这些点会给识别工作造成干扰。剔除“鬼点”的工作分为3次,第1次是在起始帧处,第2次与识别工作同步进行,第3次在识别工作结束后。由于“鬼点”并不产生运动,其坐标变化微小,因此,可根据这个特点结合对其坐标的合理性分析来进行剔除。在识别工作完成后,最后一项任务就是对缺失的数据进行修补,本研究采用3次样条插值的方法中断空白进行了数据填充。
2.4 反馈指标的确定
在对原始数据的后处理中,本研究采用Butterwo rth二阶低通滤波器对所有Marker球的原始三维坐标进行数据平滑(截止频率为10 Hz),测力台数据不作平滑处理。采用Dempster等人的人体测量学参数计算人体重心,线或角运动的速度参量采用有限差商法计算得到[10]。
对于动作技术的快速反馈而言,在筛选指标时不仅要注重指标的关键性,并且应尽可能地选择简单明了的指标,这将有利于教练员和运动员的理解,这一点是影响反馈效果的一个重要因素。对于抓举动作,人铃位置关系、各关节角运动变化、运动各阶段时间比等都是常用的运动学评价指标[2,3,6,7],对于动力学指标,垂直地面反力、对杠铃的作用力以及对杠铃的输出功率则能有效反映运动员发力特点及专项能力[1,8,9,12]。在查阅有关抓举动作的生物力学分析文献的基础上,本研究确立的主要运动学反馈指标有:人体重心与杠铃中心的轨迹线及其水平距离、杠铃垂直及水平速度、抓举动作过程的各阶段时间分配、膝角-时间曲线。主要动力学反馈指标有:垂直地面反作用力、对杠铃的作用力和对杠铃的输出功率,其中,对杠铃的作用力及输出功率由杠铃的质量、加速度以及速度指标派生获得。所有上述指标及更多的其他相关指标在测试结束后都被保存成表格形式的数据文件,可选择性打印输出。
3 测试结果
通过第一阶段的实验,在完善反馈系统的基础上,本研究又进行了第二阶段的实用测试,对2名举重运动员的20次抓举动作的技术指标进行了现场反馈。测试结果表明,本研究所建立的快速反馈系统在运动模式识别方面准确无误,并能实现真正意义上的实时性,从运动员动作结束至输出反馈结果只需大约10 s,反馈结果直接输出到大屏幕显示器上。为了比对反馈速度,本研究特意对手工输出测试结果所需的时间进行了测算,结果表明,即使是熟练的操作人员对一次抓举动作的数据整理与输出也至少需要15 min。图4为第二阶段实验中男性运动员在抓举80kg时的快速反馈界面,反馈所输出的三维人体棍图及各项指标能被运动员很好地理解与接受,特别是三维棍图的实时再现(可从任意视角观察)能有效帮助运动员准确把握对该次抓举动作的技术感知,运动棍图中也同步绘出人体重心与杠铃中心的运动轨迹线。运动学与动力学指标曲线反馈结果可通过工具栏中的标签按钮进行切换观察,运动学指标曲线(图4A右侧)从上至下分别为:杠铃中心点垂直及水平速度、“两心”(人体重心与杠铃中心的)水平距离、各阶段时间分配、右膝关节角度(对称性原因,只取一侧)。动力学指标曲线(图4B右侧)从上至下分别为:垂直地面反作用力、对杠铃的作用力及对杠铃的输出功率值,所有指标的数值显示均与运动棍图同步。综合相关文献,结合图4中的指标曲线图并参考其他受试者的结果表现,可以大致对该运动员的技术特点进行如下的简要评判:该运动员的引膝提铃动作(第二阶段)不够明显,表现在膝关节角度的第一峰值与第一谷值在数值上很接近(其他运动员在引膝时均有一个明显的下蹲动作),这也造成了杠铃垂直速度在此阶段没有出现下降的现象,而是持续增大。另外,该运动员的“两心”水平距离尚显不够接近,且第一谷值出现在发力阶段(第三阶段),而其他运动员的这个谷值均出现在引膝提铃结束时刻(第二阶段末)。对于杠铃中心与人体总重心的空间位置关系,有研究表明,优秀运动员可出现杠铃轨迹线穿越重心轨迹线的现象,但该运动员包括其他3名受试者的所有试举过程中均未见这种情况。
在动力学方面,结合文献报道并对所有受试对象的反馈结果进行比较后可知,该运动员的垂直地面反作用力曲线在腾空(力值迅速降为零)结束后形成支撑时所达到的第二峰值偏小,反映出该运动员下支撑能力尚待加强,这从膝关节角度曲线及对杠铃作用力曲线中也可以得到反映,表现为屈膝过于迅速(离心能力不足),杠铃失重较大。需要指出的是,随杠铃重量的上升,所有运动员均会表现出这种趋势。因此,更具意义的工作是在同一杠铃重量水平下对不同运动员的表现进行比较。鉴于本研究的重点在于反馈系统的建立,因此,本研究不再对各受试者的抓举动作本身进行过多的技术分析和诊断。
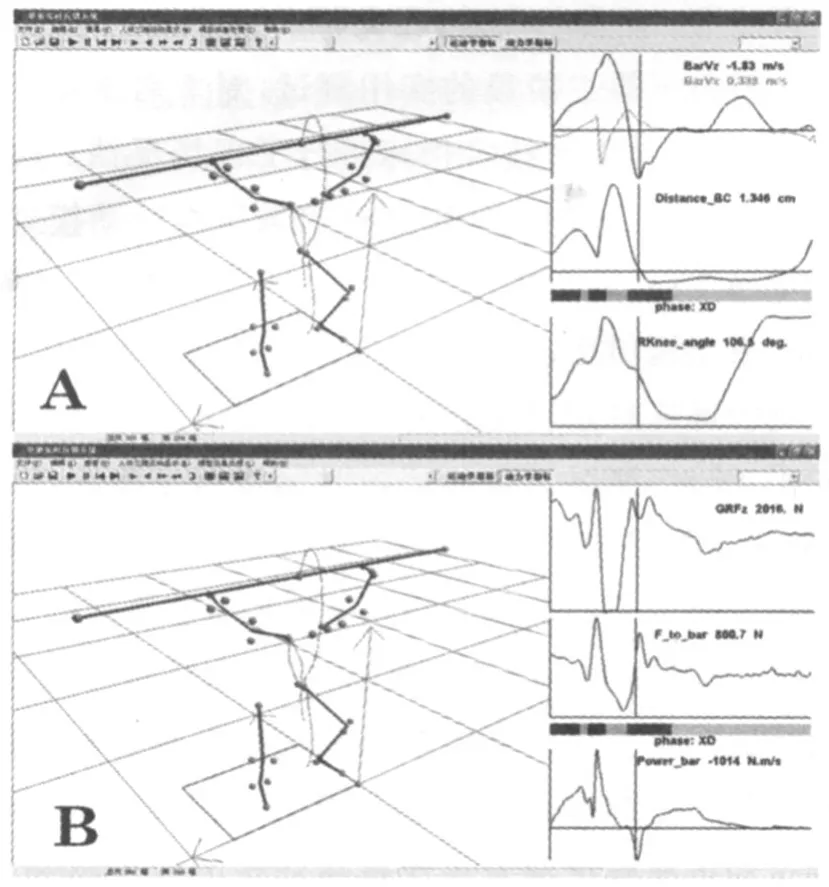
图4 抓举动作快速反馈系统界面图(A图与B图的指标曲线分别为运动学与动力学结果)Figure 4. The Interface of the Quick Feedback System for Snatching (curves in A and B are the kinematics and kinetics parameters results respectively)
除了在交互界面上观察反馈指标外,所有可计算得到的指标均可通过对话框选择性输出,包括各特征时刻的各种关节角(髋、膝、踝及躯干)、两心距离、杠铃运动速度、做功及功率等指标并备注运动员姓名及抓举重量,表1选择性提取了若干指标以示说明,数据来源仍为图4中的运动员(表中与时间有关的参量均以动作总时间的百分比表示)。

表1 抓举指标选择汇总一览表Table 1 The Technique Parameters of the Snatch Action
4 讨论与展望
对人体运动进行测量、分析和评价是运动生物力学应用领域的一项重要工作。在某些情况下(运动员技术诊断或病患行为能力评估等),测试结果的反馈速度是影响其应用性的一个重要因素。在本研究的第二阶段测试过程中,运动员可以实时看到自身动作的反馈结果,在工作人员对各项指标结果进行解释后,运动员很快便能理解自身技术的特点以及存在的技术缺陷。在测试过程中,当加大杠铃重量出现试举失败时,运动员通过观察反馈结果也能很快找出导致失败的主要运动学原因。这种动作技术的快速反馈机制能有效帮助运动员建立准确的动作技术感知,这对于技术学习或技术改进无疑将起到良好的辅助作用。
由于本系统是建立在红外光点捕获系统的硬件平台之上的,而此类硬件系统价格较为昂贵,从应用的可行性角度考虑,可采用的一种折衷方案是专业运动队通过技术训练营的方式与有条件的实验室合作,安排1~2周的针对性技术训练课,在快速反馈系统协助下完成既定的技术训练任务。
对于本研究所开发的反馈系统,也需要在将来的进一步应用中不断完善,可改进的方面包括:设计便于运动员穿戴的Marker球定位方案(比如将Marker球固定于弹性护具上)、反馈指标可根据运动员个体特征进行定制、正确动作与错误动作的对照叠加反馈等等。
[1]艾康伟,李方祥,郝卫亚,等.举重抓举和下蹲翻运动学比较和用力特征分析[J].体育科学,2005,25(7):39-42.
[2]刘学贞,王向东.对抓举引膝提铃和发力阶段动作的生物力学诊断[J].北京体育大学学报,1999,22(3):50-52.
[3]陆爱云,庞军,伍勰.不同重量下男子抓举动作的生物力学特征[J].上海体育学院学报,2000,24(3):58-61.
[4]刘国翌,陈睿,邓宇,等.举重运动的人体三维模型重建及仿真[J].系统仿真学报,2006,18(2):301-305.
[5]王向东.抓举技术的生物力学研究及杠铃杆端点的自动识别[D].北京:北京体育大学博士论文,2006:71-73.
[6]王向东,刘梦飞,徐文泉.优秀女子举重运动员抓举技术的生物力学分析[J].中国体育科技,2008,44(6):93-95.
[7]王明暄,刘伟民.从运动生物力学角度看抓举失败[J].体育与科学,2001,22(3):32-33.
[8]王云德,卢德明,艾康伟,等.举重技术的生物力学特征[J].体育科学,1984,4(4):63-67.
[9]张跃,蔡国均,卢青,等.抓举运动“两心”的运动规律及人体做功的功率和效率[J].体育科学,1990,10(5):60-65.
[10]DAV ID A W INTER.Biomechanicsand motor controlof human movement(3rd ed.)[M].USA:John Wiley Sons,2005:63-64.
[11]D GORDON E ROBERTSON,GRA HAM E CALDW ELL,JOSEPH HAM ILL,et al.Researchmethods in biomechanics[M]. USA:Human Kinetics,2004:39-41.
[12]SOUZA A L,SH IMADA S D,KOONTZ A.Ground reaction forces during the power clean[J].J Strength Conditioning Res, 2002,16(3):423-427.
Quick Feedback of Snatch Techn ique Based on Infrared Motion Capture System
WU Xie
Objective:The aim of this study is to develop a quick feedback system for snatch technique based on infrared motion cap ture system.Methods:the real-time 3D kinematics data of markers and GRF signals were collected synchronously w ith V ICON system and impo rted to motion pattern identify p rocedure.After all markers were identified and all data gaps were filled w ith cube spine interpolation,the 3D stick figure and a series of technique parameters during snatching is p resented by quick feedback system directly.Results:the feedback test on 20 trials of two elite weightlifters show s the quick feedback system developed in this study can identify the snatch action accurately just in few seconds and meet the need of training p ractice quite well.Conclusions:Developing a quick feedback system based on infrared mo tion cap ture system is a p racticable and wo rth p romoting solution for motion analysis.
w eight lif ting;snatch technique;infrared motion capture system;quick feedback
G804.6
A
1000-677X(2010)08-0073-04
2010-01-25;
2010-07-10
上海市教委科研创新项目(08YZ131)。
伍勰(1972-),男,浙江瑞安人,副教授,博士,研究方向为运动技术分析,Tel:(021)51253239,E-mail:w uxie1115 @yahoo.com.cn。
上海体育学院,上海200438 Shanghai University of Sport,Shanghai 200438,China.