农机测力计的机器视觉数据采集方法❋
2010-09-11吴海平王玉顺
吴海平,王玉顺
(山西农业大学工学院,山西 太谷 030801)
农业机械多在田间作业,工作条件恶劣,土壤、作物等作业对象的物理机械性质及农业自然条件复杂多变,造成影响农业机械作业的因素异常复杂且又变化无常,给科学研究带来很大困难.因此,试验测试工作在农机科研中占有独特的主导地位,具有特别重要的意义.农机试验往往受季节性限制,因而许多国家不懈地致力于如何在较短时间内准确便捷地获得试验结果.将科学技术新成果应用到农机科研,改进试验方法和测试技术,研制更加高效的测试方法、试验仪器和设备,加速农机科研和产品开发一直是我国乃至世界各国农机科研部门普遍重视的问题[1-2].
农业机械机组、部件、构件等的受力测定,可有效解决农业工程领域理论、设计、制造及使用上诸如作业阻力、牵引效率、牵引功率、机具结构及配套性能评价等问题,是农机科研试验测试的一项重要内容,本文尝试采用机器视觉技术改进测力计数据采集、记录及分析的装置和性能.
1 农机测力计使用中存在的问题
农业机械牵引力、牵引阻力和滚动阻力等参数主要使用测力计测定,常用弹簧测力计、液压测力计或电子测力计等,这些仪器结构简单,维护和调节方便,精度不是很高,但已能满足多数情况下的农机测试要求[1,3-4].
试验测试过程中,测力计的表显数据或由人工读取和记录,或由仪器配置的滚筒记录仪记录,再经人工量测记录曲线获得数据,最后对数据汇总并进行相应处理.农机测试大多是在机具行进过程中实施,由于机具振动或受力本身动态变化使得测力计的测力指针不停摆动,导致人工难以均匀间隔地进行读数,获取的数据误差很大,甚至不能读得正确结果,尤其难以获得动态数据序列,在有限试验区段内得不到充足的数据量.而带有记录装置的测力计可记录时间较短,常常无法完成整个试验段的测试记录,且仪器结构复杂,记录转换成测力结果误差大,易出故障,可靠性差,调试误工费时,还必须由技术熟练的工作人员使用仪器和整理记录图[3-4].
为了提高农机测力数据采集及处理的速度、精度和自动化程度,迫切需要系统简单、便捷高效的测试方法和技术.为此,进行了农机测力计机器视觉数据采集方法的探索,并研制出直读式测力计配置机器视觉数据采集的农机测力系统,它用简单廉价的通用器具实现了简便、快捷、准确、计算机自动记录及数据处理的高效试验测试.
2 测力与数据采集方法
测定田间作业机组的牵引阻力和牵引功率等,采用适宜量程、精度及类型的直读式测力计,且测力计两端分别水平连接辅助拖拉机和作业机组,详见图 1.将原来人工目测读取表盘指示改为在测力计刻度盘正对面固定数码摄像头,摄像头的 USB接口与计算机相连,组成图像数据采集与处理系统.测力过程中,测力计刻度盘和表针位置的图像被采集并存储于计算机中,获得视觉检测样本(序列图像样本)以待图像处理、图像检测和数据分析.

图1 试验机具与机器视觉采样测力系统Fig.1 Equipment fo r ex periments and dynamometer combining with machine vision
3 视觉检测样本的图像处理和检测过程
对视觉检测样本进行处理,主要包括图像指针标定、剪切灰度图像、滤波、灰度变换、二值化变换、抽取指针对象、提取指针转角等过程.图像处理采用 MATLAB语言编程实现[5-7],目的是提取表针中线的转角数据,以此为基础由标定的转角测力模型计算测得的牵引阻力,同时测取作业机组的行驶速度,则能计算牵引功率.常用测力计有旋转指针式和直线位移指针式两类,如图 2所示.下面以旋转指针式测力计的黑白视觉采集图像为例,讨论图像处理、图像检测和数据分析过程,其方法同样适用于直线位移指针式,而对于彩色视觉采集图像只需增加一个彩色图像到灰度图像的变换即可[6].



3.1 转角测力模型与图像标定
图像标定就是确定表征测力值与图像指针转角关系的转角测力模型.在测力计上分别施加 5个标准重块,在测力计指针指向相应刻度并稳定后采集表盘及指针图像,经图像处理提取出指针对象(参见图3),再提取指针图像各个像素的坐标,采用最小二乘法确定指针中线的转角,标定测力值与指针中线转角关联的转角测力模型

式中:p为测力值,kN;k0为回归截距,kN;k1为回归系数,kN/°;h为指针中线转角,°.
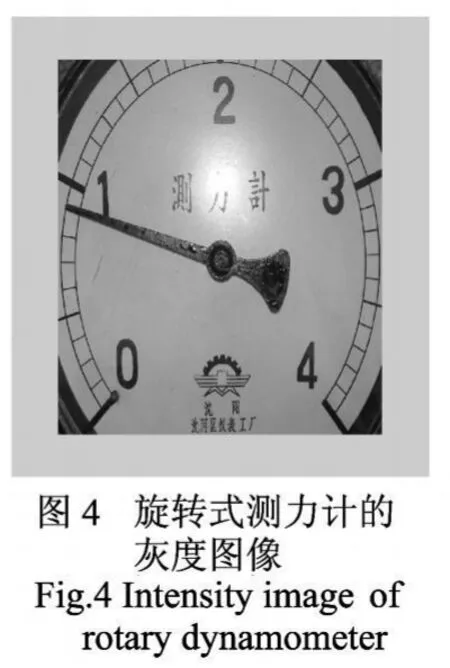
3.2 灰度图像的剪切
从视觉检测样本中逐个抽取帧图像,由于只关心指针中线的转角,根据表盘及指针成像的有效范围剪切合适大小的灰度图像,如图 4所示.设置剪切框尺寸时,遵循既要保留足够的有用信息、又要尽可能减小图像尺寸的准则,在保证检测精度需要前提下减小数据处理量.剪切的灰度图像可用灰度矩阵G0表示.
3.3 反色变换、滤波和灰度变换
反色变换将指针对象转换为高亮度,这是二值变换并提取指针对象所需的.反色变换后的图像可用灰度矩阵表示为

由于采用光照固有的不均匀性,指针成像不可避免地存在灰度不均匀性,为提取较精确的指针二值图像,需要对指针内部的灰度进行平滑.灰度平滑采用 M ATLAB非线性中值滤波器[6]实现,一般来说,指针内部的孔洞被“填充”,指针灰度不均匀性得以大幅减弱.因此,需要根据图像的实际质量调整中值滤波器尺寸,以达到较好的滤波效果.滤波后的图像可用灰度矩阵G2表示[5].
对滤波后图像进行灰度变换,主要是为了凸显指针对象,以便二值变换时保留较完整的指针轮廓.反色、滤波和灰度变换后的图像见图 5,可用灰度矩阵 G3表示[5].
3.4 二值化变换
采用 Otsu′s方法[6]计算阈值 T,矩阵 G3中灰度大于的像素群取值为 1,小于的像素群取值为 0,二值化变换后的图像见图 6,可用二值矩阵 BW[7]表征,其像素灰度值符合

式中:bw(i,j)为二值矩阵 BW第i行第j列的像素灰度值;g(i,j)为灰度矩阵G3第i行第j列的像素灰度值.
采用 Otsu′s阈值进行二值化处理,既实现了处理过程的自动化,又较完整地保留了指针对象,具体如图 6所示.

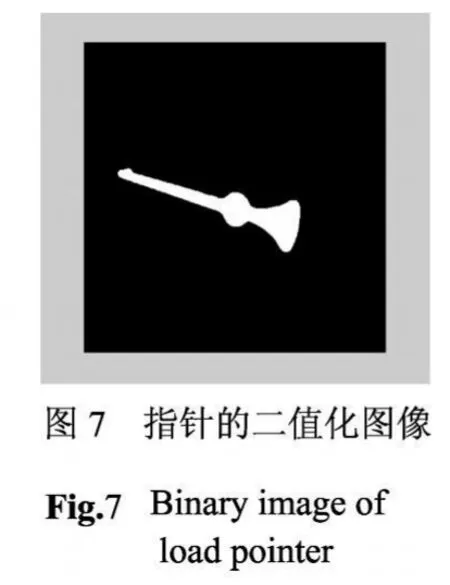

3.5 指针对象的抽取
采用腐蚀、去除边缘对象、去除小面积对象、膨胀[6]等顺序算法,将测力计二值图像(图 6)中的无用对象去除,只保留指针对象.获得的只存在指针对象的二值图像,如图 7所示.
3.6 指针中线转角的提取
图像坐标系左上角为原点,水平向右为水平轴,垂直向下为垂直轴 y,像素坐标为(x,y).以图像中指针对象的中线表征指针位置,采用最小二乘法确定指针中线的斜率 k1,指针中线旋转范围的象限划分方法如图 3所示.根据指针尾部所在象限判别指针转角测定值如下:
1)指针尾部在第1和第2象限时,计算指针转角为

2)指针尾部在第3和第4象限时,计算指针转角为

获得指针转角h后,由式(1)计算测力计的测力值.
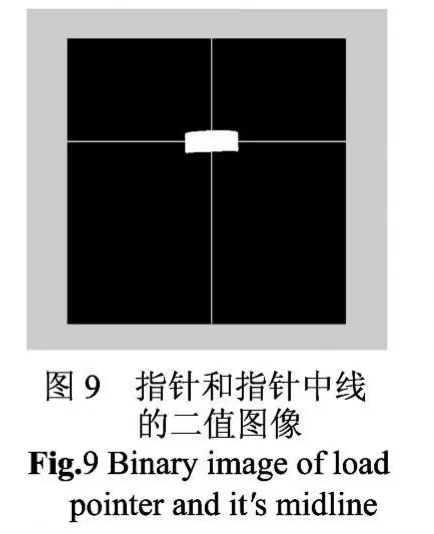
3.7 直线位移指针式测力计的视觉测力方法
在测力计指针上固定一黑色聚酯环,改造后的指针便于成像,如图 8所示.图像处理过程根据测力计的特点略有改动,其余与旋转指针式测力计相同.以二值图像中指针对象的水平指针中线表征指针位置,采用最小二乘法估计该指针中线的垂直坐标 y,如图 9所示.图像指针中线垂直坐标与施加力成对标定,得类似式(1)的测力值与指针中线关联的坐标测力模型

式中:p为测力值,kN;k0为回归截距,kN;k1为回归系数,kN/pixel;y为指针中线的垂直坐标,pixel.
4 测力计机器视觉数据采集的误差分析
为考察视觉数据采集方法的实际效果,参照农业机械试验的相关规范和程序[1,3-4,8]对作业机组牵引阻力进行了试验测定.
牵引动力采用上海-50型拖拉机,被测机组采用黄海-280拖拉机悬挂 4S-80马铃薯挖掘机[9],两者之间安装测力计和视觉数据采集系统.测力计的测量范围为 0~3 t,精度 2%.在 70 m长的农田选择 3种机组速度进行田间试验,有效测区 30 m,用直读式测力计测试不同工况下的机组牵引阻力,由视觉数据采集系统记录测力计表显图像.
对试验采集到的视频样本,采用 M ATLAB软件完成序列图像样本截取、图像处理、图像检测和数据处理等工作.等间隔从视频样本中抽取帧图像,获得容量 270的序列图像样本,图像处理提取表针获得二值图像样本,采用最小二乘法检测表针转角,获得序列转角样本.人工读取序列图像样本的表盘读数,获得视觉检测结果的牵引力对照样本.标定式(1)转角测力模型,用该模型将转角样本换算成牵引力数据样本.牵引力数据样本值减去牵引力对照样本中的对应值,获得误差样本,误差除以对应的牵引力视觉检测结果,获得相对误差样本.参照文献 [10]计算误差及相对误差的标准差和不确定度,结果详见表1.
文献 [11-12]报道,电测误差一般在 1%~5% 之间,电子测力计动负荷试验的检测精度为(5±0.124)kN和(10± 0.098)kN.对照表 1,测力 3.125~ 12.500kN范围内最大误差限为±0.8928%,检测精度(5±0.045)kN和(10±0.0893)kN,可见机器视觉数据采集的检测误差没有超过应变电子式数据采集的检测误差,达到农业机械田间试验的测试要求,工程应用可行.
5 结束语
1)直读式测力计机器视觉数据采集是一种准确可靠、简捷高效的农机测力新方法.它解决了测力计人工读数误差大、动态数据不易获取等难题,实现了田间作业机组动态阻力过程的实时检测和数据记录.
2)田间作业机组的阻力多处于低频状态,采用较小帧率视觉传感器可减小机器视觉数据采集的配置成本,而对于高频阻力过程应采用较高帧率的视觉传感器.
3)转角测力模型和坐标测力模型的标定,是提高直读式测力计机器视觉数据采集精度的关键环节.
4)现有的简单测力计配置机器视觉数据采集系统,可实现农机测力的大容量动态数据采集和记录,并可由计算机方便地完成后续数据处理.由于数据样本容量的大幅增加,也使得测定的结果更加准确.
5)机器视觉数据采集的误差分析表明,测力在 3.125~ 12.500kN范围内最大误差限为±0.8928%,测力误差限没有超过应变电子式数据采集,满足农业机械田间测试要求.
[1]孙廷琮.农业机械测试技术[M].北京:中国农业机械出版社,1987.
[2]朱继平,彭卓敏,袁栋,等.我国农机检测仪器设备的现状及发展趋势 [J].农机化研究,2010(2):249-252.Zhu Jiping,Peng Zhuomin,Yuan Dong,et al.The current situation of the detecting instrument of farming machine in China and its development trend[J].Journal of Agricultural Mechanization Research,2010(2):249-252.(in Chinese)
[3]联合国亚洲太平洋经济社会委员会农业机械区域网.农业机械试验规范和程序[M].王金玲,郭向谦,译.北京:机械工业出版社,1993.
[4]维索茨基 A A.农业机械动力测量及仪器[M].边耀刚,封家汉,译.北京:机械工业出版社,1960.
[5]Gonzalez R C,Woods R E.数字图像处理(第二版)[M].阮秋琦,阮宇智,译.北京:电子工业出版社 ,2003.
[6]王玉顺,郭俊旺,赵晓霞,等.基于机器视觉的条播排种器性能检测及分析[J].农业机械学报,2005(11):50-54.Wang Yushun,Guo Junwang,Zhao Xiaoxia,et al.Performance detection and analysis of a machine vision based metering mechanism of drill[J].Transactions of the Chinese Society for Agricultural Machinery,2005,36(11):50-54.(in Chinese)
[7]徐昕,李涛,伯晓晨,等.M AT LAB工具箱应用指南◦信息工程篇 [M].北京:电子工业出版社,2000.
[8]李京忠,郭志强,范建华,等.GB/T3871.9-2006,农业拖拉机试验规程第9部分:牵引功率试验 [S].北京:中华人民共和国国家质量监督检验检疫总局,中国国家标准化管理委员会,2006.
[9]吴海平,侯建丽,郝琴,等.4S-80马铃薯振动挖掘机牵引阻力的测试分析 [J].山西农业大学学报(自然科学版),2009,29(4):351-354.Wu Haiping,Hou Jianli,Hao Qin,et al.Experimental study on traction resistance for4S-280potato shaking digger[J].Journal of Shanxi Agricultural University(Natural Science Edition),2009,29(4):351-354.(in Chinese)
[10]滕光辉.农业生物环境因素测试技术[M].北京:中国农业大学出版社,2005.
[11]吕益泰.DZ-A型电子测力计的研究 [J].农业机械学报,1985(1):84-95.L ü Yitai. Researches on model DZ-A electronic dynamometer[J]. Transactions of the Chinese Society for Agricultural Machinery,1985(1):84-95.(in Chinese)
[12]华中农学院.拖拉机汽车学(第五册 试验实习)[M].北京:农业出版社,1983.
