矿井交流提升机新型动力制动电源探析
2010-09-08薛峰
薛峰
(内蒙古科技大学,内蒙古 包头 014010)
1 引言
长期以来,动力制动是国内矿井交流提升机广泛采用的电气制动方式之一,矿井提升机是煤炭、冶金、有色和黄金等矿山生产过程中非常重要的设备。全国在用的矿井提升机,仅煤炭行业统配矿就有上万多套,冶金、有色和黄金等行业的使用量也十分可观。由于历史的原因,这些提升机所用的电气控制设备普遍存在技术落后、结构庞大、连线复杂、故障率高、使用维护难度大等问题,直接影响了矿井提升机的安全和效率,也阻碍了矿井自动化和管理现代化的步伐,急需采用现代高新技术设备来更新换代,也是广大现场使用维护人员迫切要解决的技术问题。
虽然自动晶闸管控制动力制动电源发展己经成熟,也得到了一定的应用,但是由于晶闸管是半控型器件,因此控制效果往往不太理想,同时由于使用了低频变压器,从而使整个控制设备体积庞大。
2 矿井提升机动力制动
2.1 矿井提升机盘闸式制动
盘闸式制动系统如下图所示,是通过给定速度信号和实际速度信号比较,经磁放大器综合、放大,来调节电液调压装置输入电流的,达到改变油压的目的。本系统中越大,盘形闸和制动盘的压力越小,制动力矩越小。可以看出,它是将机-电-液融为一体,环节多,惯性大。最为明显的是该制动为能耗制动,又有闸瓦磨损,经济性差。

2.2 矿井提升机动力制动
矿井提升机电力拖动系统的结构如下图所示

矿井提升系统
电动机正常运行时,电动机定子回路通入的是三相交流电,在电动机转子旋转时,切断定子交流电源,然后输入直流电,此时,当电动机定子绕组中将形成一个静止的定子磁场,这个磁场在旋转的转子绕组内感应电动势,并由此产生转子电流。静止的定子磁势与转子电流磁势形成的合成气隙磁通与转子电流相互作用,产生制动力矩,电动机进入制动工作状态,这种制动方式称为动力制动。动力制动过程中,定子磁场是静止的,转子速度就是转子导体切割磁力线的速度。
3 系统的组成框图及工作原理
该系统的基本工作原理是:三相工业电源首先经过一次不可控整流,得到较为粗糙的一次直流,然后经过PWM斩波控制,得到高质量可调的二次直流电,再经过变压器变压后就可以得到所需要的直流电。当提升机进行制动时,通过切除三相异步电机的定子交流电的同时,加入上述的二次直流电,进行能耗制动。本方案采用速度与电流双闭环的形式进行控制,来提高控制效果和精度。整个系统框图如下所示。

一次整流包括系统的输入电路、全桥整流器等,主要完成交流电网电压的整流功能,使交流电变为较为粗糙的直流电。输入整流滤波器将输入电压进行整流滤波,因此整个系统的变压器、输出滤波器等部分的体积与传统的相控整流装置都要小的多。滤波品质的高低直接关系到输出直流电中交流分量的高低,即波纹系数,这项参数越小越好。另外滤波电容的容量和品质也关系到电流变化时电压的稳定程度。辅助电源为IGBT的控制电路、驱动电路、保护电路、各种传感器、控制系统等提供彼此隔离的且满足一定技术要求的直流电压,保证它们正常可靠的工作。该系统的辅助电源采用的是稳压芯片来得到控制系统所需要的电压。
PWM发生电路接收保护控制电路的信号,产生脉冲信号,通过驱动电路驱动IGB通断的频率,从而来控制高频逆变环节工作时的占空比,使开关电源即使处于不同的负载下,也能通过反馈来调节占空比来维持输出电压的稳定。保护控制电路检测系统的输出电压和电流,和参考电压电流相比较,产生误差信号,送给PWM产生电路,即调整输出脉冲的宽度,从而达到控制系统占空比的目的。同时当系统的输入输出产生错误,比如过压、过流、缺相等,可以立刻封闭脉冲产生信号,使系统停止工作,达到保护系统的目的。
4 速度检测电路设计
对电机的速度进行测量的方法主要有两种,一种是采用测速发电机,另一种是采用光电编码器。采用测速发电机测速存在非线性和死区问题且精度较差,需要的外围硬件电路较多;而采用光电编码器则可达到较高的测量精度,不易受外界环境的影响;本设计中采用的是增量式光电编码器,输出的两路脉冲信号加到TMS320F2812的QEP3和QEP4引脚上,通过测得的脉冲个数很容易就能算出电机转速,同时还可以根据两路脉冲的先后顺序确定出电机的转向。
5 电流检测调理电路的设计
在本论文所设计的系统中,电流的检测也是必不可少的,比如输出滤波电感(实际上是输出变压器的漏感)上电流的采样,逆变器输出电流的采样,负载电流的采样等。电流信号的处理和电压信号的处理有所不同,它首先要转换成电压信号才能对其进行处理。可以有两种方法获得,即在电路中串联一个采样电阻获得与采样电流成正比的电压信号;也可以采用霍尔电流互感器将电流信号转换成和其成线性关系的电压量。
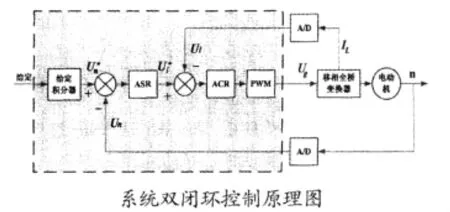
6 制动系统控制流程
为了满足提升机在减速段的减速度的要求,需采用双闭环调速方案。如下图所示,ACR为电流调节器。速度给定U*由给定积分器产生。给定积分器输出电压U*变化率与提升机的减速度相对应。在提升容器到达减速点后,切除定子高压电源。制动电源接触器合闸,其辅助接点闭合,DSP得到此信号,U*按给定的减速度减小。
7 移相角的产生方法
全桥移相PWM变换器,利用超前桥臂和滞后桥臂的相移来调节占空比。对所产生的PWM信号的要求如下:
(1)上下桥臂两管的驱动信号180度互补导通;(2)4路驱动信号占空比均设置为50%,由于死区时间的影响实际输出较小;(3)两组桥臂之间有相位差,相位超前的信号作为超前桥臂信号,相位滞后的信号作为滞后桥臂驱动信号。
驱动信号生成可通过DSP的事件管理模块EVA或EVB产生。事件管理器EVA或EVB有3个全比较单元,每个全比较单元都有两个互补的PWM脉冲输出,因此可以使用其中两个比较单元提供4路驱动信号;设置定时器为连续增减计数模式,在定时器下溢中断和周期中断时分别设置比较寄存器的值,同时保证同一个比较寄存器在定时器下溢中断和周期中断设置参数之和等于周期寄存器的值T,这样就可以使产生的PWM脉冲为 50%的占空比。死区时间由死区控制寄存器产牛。利用DSP的全比较单元可以方便地产生各种对称或者不对称的PWM波形。本文使用E VA中的通用定时器GPI实现采样周期,由于所设计的变换器的功率开关的工作频率为20kHz,所以采样周期为50微妙。
8 总结
目前,矿井交流提升机大都采用动力制动或低频电源制动方式。由于动力制动为能耗制动,以及制动可靠性差等因素,一直是制约动力制动电源发展的一个瓶颈。本设计所采用的DC/DC变换技术应用到制动电源上,从而提高了制动电源的效率和可靠性,并缩小了制动电源的体积:尤其是DSP的运用,让系统的控制精度进一步提高。
[1]郝建功,张耀成,矿井提升机动力制动过程中的模糊控制,煤炭学报2003年
[2]王聪,吴宏杰,魏伟华,用于DC/D全桥变换器的全数字式PWM控制器,电力电子技术,2000年
