双线结构光焊缝跟踪传感器及其特性
2010-09-06乔东虓郑军潘际銮
乔东虓,郑军,潘际銮
(清华大学机械工程系先进成形教育部重点实验室,北京100084)
双线结构光焊缝跟踪传感器及其特性
乔东虓,郑军,潘际銮
(清华大学机械工程系先进成形教育部重点实验室,北京100084)
单线结构激光器由于其安装位置与焊枪有一定的距离,传感器测量结果并不能完全表示焊枪位置,应用在移动式焊接机器人上会出现难以克服的导前误差。在此介绍了一种双线结构光传感器,它采用两个线状激光作为光源,同时在不同位置测量焊缝的相对位置。这样的结构特点使传感器在消除焊枪导前误差、跟踪弯曲焊缝方面有普通结构光传感器所不可比拟的优势。基于此原理,研发了传感器实物并在移动焊接机器人上验证了其克服导前误差的功能。
结构光传感器;双线;焊缝跟踪
0 前言
目前结构光传感器已广泛的应用于焊接自动化领域。英国META和加拿大ServoRobot公司是世界领先的结构光传感器供应商,其传感器及配套的控制系统、执行机构广泛地应用于能源、造船等领域中各种设备的自动化焊接制造中。
国内的中科院自动化所、清华大学、华中科技大学等机构也对结构光传感器进行了深入的研究[1],主要涉及结构光传感器的设计、光学系统、图像处理等。国内广泛使用的结构光传感器使用单线激光,可以测量焊缝相对于传感器的偏差和焊炬高度,在各种有轨道的焊接设备上取得了很好的效果。但是当该种传感器用于移动式机器人时,由于机器人本身姿态会发生变化,相对于焊缝距离和角度都会变化,单线结构光传感器不能测量角度变化,给机器人的控制系统带来问题[2]。
另外,在移动式焊接机器人上面使用单线结构光传感器,由于传感器位置和焊枪位置不同,在机器人旋转时,虽然传感器跟踪准确,但焊枪会出现偏差导致导前误差,通过简单的记忆和延迟难以消除。
双线结构光传感器是对普通单线传感器的一种重要改进,此传感器同时采集两个焊缝的图像,通过对激光图像的处理得到传感器相对于焊缝的位置偏差、高度偏差、角度偏差甚至焊缝的曲率,便于消除导前误差,也可以为移动机器人的控制提供更多的反馈信号,相对单线结构光传感器具有很大的优势。另外,通过合理的设计,还可以使用单个激光器同时产生两个激光线,使用一个摄像机同时采集两个图像,相对于单线激光器,成本基本相同。
1 双线结构光传感器的结构
一种简化的双线结构光传感器结构示意如图1所示。

图1 一种双线激光传感器示意
图1中,结构光激光发生器1射出的线状激光经过半反射镜3反射以后,分为透射光4和反射光5。两束激光照在工件表面的焊缝上,形成两个条纹,分别在摄像机8上成像,实现双线结构光的检测。通过调整半反射镜3的位置和角度,还可以实现光束夹角和位置的调整,CCD采集到的两个图像如图2所示。
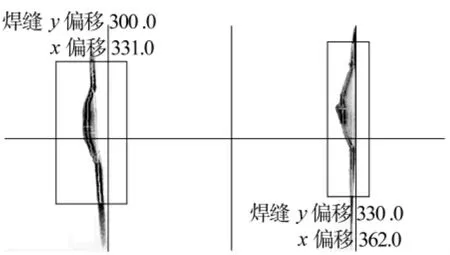
图2 双线结构光传感采集到的图像
2 工作原理及特性分析
根据上述传感器的结构,对传感器的功能与性能进行理论分析。
2.1 普通平面焊缝的跟踪
双线激光传感器可以同时获取两个不同位置的坡口图像,其中任何一个均可以作为普通单线激光传感器使用,通过图像处理得到焊缝偏差信息。
双线结构光传感器的主要优势在于:由于两个激光线的相对位置在传感器偏转时会发生改变,经过图像处理可以得到传感器相对于焊缝的角度信息,从而预测焊枪相对于焊缝的位置,减少甚至消除导前误差,其基本原理如图3所示。
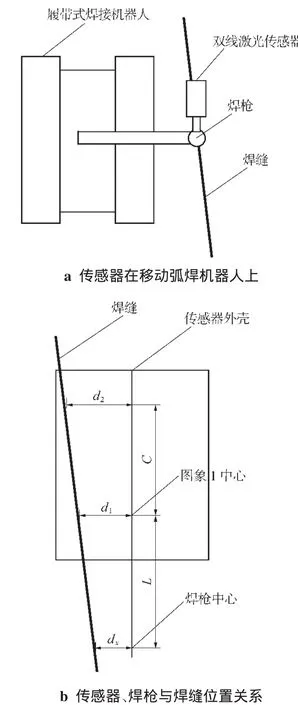
图3 双线激光传感器消除导前误差示意
图3a为传感器安装在移动焊接机器人上时的情形,图3b为传感器机头的局部放大。下面分析焊枪传感器以焊缝三者的位置关系。
图3b中,dx为待测的焊枪与焊缝距离,d1为第一个激光图样计算得到的偏差,d2为第二个激光图样计算得到的偏差,以上几个参数的关系可以用下式描述:
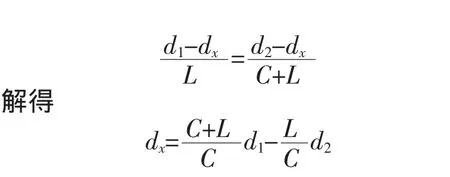
即通过两个激光图样估算的焊枪与焊缝之间的偏差。在图像处理软件中,将传感器与焊枪的距离L作为安装参数输入,将计算结果作为传感器的输出,作为偏差信号输入控制器,在焊缝为直线或者局部可近似为直线的情况下,可消除导前误差。
在上式的分析中,可以从理论上跟踪偏斜焊缝的精度,L/C越大,精度越低。
2.2 焊缝高度和斜度测量
由图1可知,该传感器可以用来测量传感器距离钢板的距离。当传感器高度发生变化时,CCD的两个焊缝图样的位置都会发生左右移动。利用该特点可以得到传感器距离工件表面的距离,可用于焊枪高度的控制。
根据上述分析结果,除了得到焊枪的偏差以外,通过两个激光器的输出结果,还可以计算车体与焊缝之间的角度α
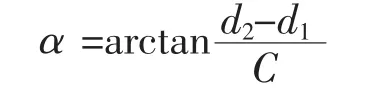
在爬行式弧焊机器人的控制中,机器人坐标系中焊缝的距离和角度是焊缝的两个空间位置参数,是控制爬行式弧焊机器人最重要的反馈参数。使用双线激光传感器可以同时获得这两个参数,从而得到机器人相对于焊缝的空间位姿。相比普通的单线激光传感器,控制系统能够获得更多的信息以简化控制。
2.3 跟踪曲线焊缝
当线激光平面的法线方向与沿焊缝垂直于钢板的平面有夹角时,CCD传感器采集到的图像相对于垂直的情况会发生畸变,利用此原理可以测量传感器与测量位置焊缝方向的夹角。
由于采用两个激光线,使用两个焊缝位置同时跟踪,可以测量在不同位置焊缝相对于传感器的转角。在跟踪直线或者近似直线焊缝的情况下,两个传感器测量的相对角度差应该是0°,但是在跟踪曲线焊缝的情况下,由于焊缝的垂直截面方向发生变化,若根据焊缝的特点将焊缝近似为圆弧,则可以求得焊缝局部的曲率半径,作为控制系统的输入信号。
根据图4可以计算出跟踪曲线焊缝的曲率半径为:
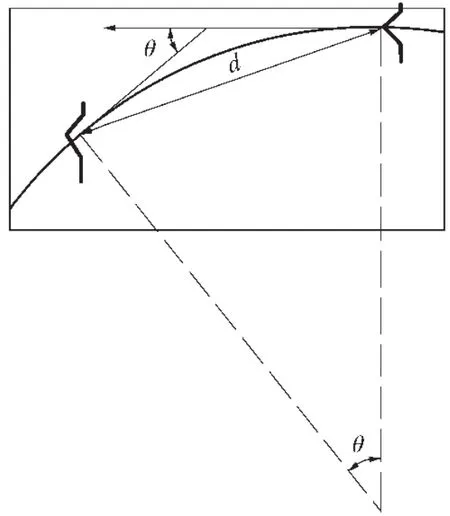
图4 从传感器测量焊缝曲率
实际上,跟踪曲线焊缝虽然在原理上可行,但是受到CCD分辨率和激光器线的线宽以及焊缝坡口本身加工精度的限制,不具有实用价值。需要今后改进光学器件以及提高CCD分辨率才有可能应用于实际中。
3 实验验证
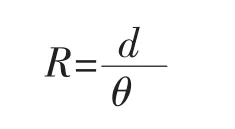
为了验证以上分析的可行性,设计加工了实际的传感器,如图5所示。
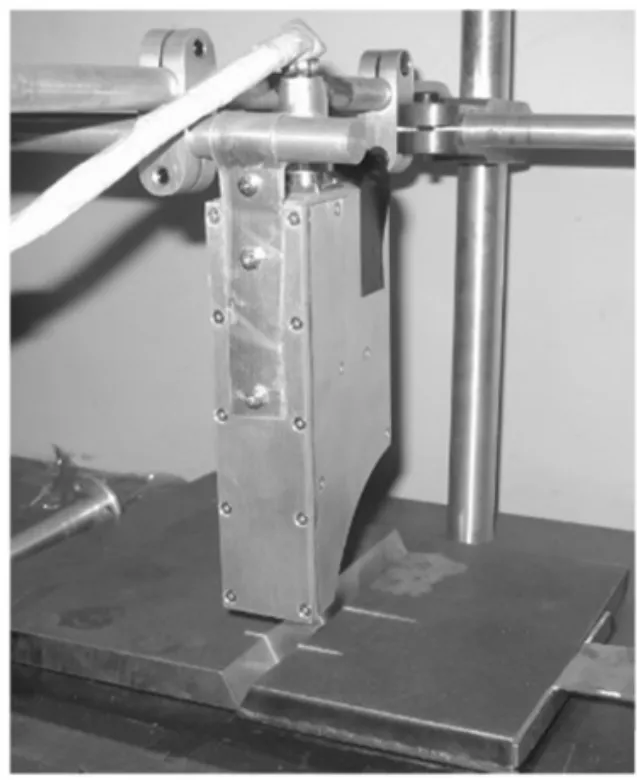
图5 传感器实物外形
经过测试,使用该传感器作为普通的单线结构光传感器,可以达到现有单线激光传感器的精度(0.1mm),而且两个激光线提供的信息融合,提高了传感器输出结果的可靠性。
此外,在移动机器人上的实验表明,该传感器消除导前误差的效果良好。
4 双线激光传感器的应用
导前误差广泛的存在于各种使用结构光视觉传感器的场合,如爬行式弧焊机器人、爬行式气电立焊机器人、管焊机、使用激光跟踪的关节式弧焊机器人等。
由清华大学研制、常州华通焊丝有限公司生产的爬行式气电立焊机器人是一种用于造船、户外大型容器制造的全自动焊接解决方案。由于气电立焊使用特殊的焊枪结构,导致跟踪焊缝用的激光传感器安装位置距离电弧较远。当机器人转向时,控制系统保证焊接传感器始终在焊缝上,但是由于车身可能不完全与焊缝平行,导致电弧位置偏离焊缝中心。使用双线激光传感器以后,可以将导前误差减小到传感器分辨率的5倍左右,即0.5 mm,保证导电嘴在焊缝的中心,防止由于导电嘴距离坡口两侧过近引起的导电嘴和坡口之间起弧,焊接中断,烧毁导电嘴。
另外,为了消除移动式焊接机器人在机器人本体和焊缝不完全平行情况下的导前误差问题,有研究者采用了双传感器的方案,在机头的焊枪前后各安装一个相对于焊枪姿态固定的单线结构光传感器,安装后机头如图6所示。
使用设计的双线激光传感器,仅需安装成本相当于单线激光器的一个传感器,即可实现消除导前误差的功能。
5 结论
双线激光传感器由于使用分光镜将原结构光传感器的激光分为两束,在工件表面形成两个焊缝图样。经过传感器处理以后可以分别得到两个传感器的图像位置,增加了传感器的信息量。该传感器具有如下特点:
(1)可以通过处理两个数据结果,消除导前误差。
(2)除了距离信息,该传感器可以输出相对于焊缝的角度信息,适用于需要对机头姿态进行控制的焊接设备,如无轨道焊接机器人。
(3)传感器可用于弯曲焊缝的跟踪,能够近似得到焊缝弯曲情况的主要特征参数。
图6 移动焊接机器人机头上安装的结构光传感器对
[1]邹媛媛,赵明扬,张雷,等.结构光视觉传感器误差分析与结构分析[J].仪器仪表学报,2008,29(12):2605-2610.
[2]马兆瑞,潘际銮,张虓,等.无轨导全位置爬行弧焊机器人在造船中的应用[J].电焊机,2006,36(3):16-18.
Dual structure laser vision sensor and its character
QIAO Dong-xiao,ZHENG Jun,PAN Ji-luan
(Key Laboratory for Advanced Materials Processing,Ministry of Education,Department of Mechanical Engineering,Tsinghua University,Beijing 100084,China)
The output of Solo laser structure laser can not reflect the position of welding torch,because of the distance between sensor and torch.And this difference may conduct big problem in some situation such as on mobile welding robot.We will introduce a dual structure laser sensor in the paper.It generates two line laser and measure the offset of seem in different position.This kind of sensor can reduce the error cause by distance between sensor and torch.It is better than single laser type especially tracking curves.We developed a specimen,and the usage on mobile welding robot shows its advantage.
structure laser vision sensor;dual line laser;weld seem tracking
book=14,ebook=350
TG409
A
1001-2303(2010)11-0014-04
2010-10-25
乔东虓(1986—),男,陕西佳县人,博士,主要从事焊接自动化技术以及水下焊接方面的研究工作。
