基于DSP的变频恒压供水模糊控制系统应用*
2010-08-28康会峰黄新春
康会峰, 黄新春, 王 元
(1.北华航天工业学院机械工程系,河北廊坊 065000;2.西北工业大学,陕西西安 710068;3.中石油集团东方地球物理勘探有限责任公司,河北涿州 072751)
0 引言
变频调速是一项有效的节能降耗技术,其节电率高,能将因设计冗余和用量变化而浪费的大部分电能都节省下来,具有调速精度高,功率因数高等特点[9]。国外学者如:美国的K.E.Lansey,RobertDemoyer Jr,L.E.Ormsbee,英国的 R.S.Powell,B.Coulbeck,P.Jowitt,日本的 Kazumasa Muguruma,M.Tuskiyama 及以色列的 U.Shamir,C.D.D.Howard等人也在供水系统建模理论上进行了许多有益的探讨,为变频恒压供水系统的性能优化提供了理论依据[1-3]。国内有不少公司在做变频恒压供水的工程,其大多采用国外的变频器控制水泵的转速[4]。水管管网压力的闭环调节及多台水泵的循环控制,有的采用可编程逻辑控制器(PLC)予以实现,有的采用单片机及相应的软件予以实现。根据国内、外在恒压供水方面的研究进展,本文提出了一种基于数字信号处理器(DSP)的模糊恒压供水系统,设计了自适应模糊控制器。应用Simulink仿真软件对比了自适应模糊控制器与PID控制器及模糊控制器的优异特点。
1 恒压供水系统硬件电路设计
1.1 系统硬件结构设计
以TMS320LF2407A芯片为核心,外围扩展了其他的功能模块,实现了以下功能:压力信号检测、水泵电流信号检测、工频电压与变频器输出电压的频率和相位的检测、D/A转换、继电器控制、通信、键盘输入、液晶显示、扩展接口及故障报警。系统硬件总体框图如图1所示。
1.2 系统工作原理
在该恒压供水系统中,首先由置于水体内的前端压力传感器完成对水压的数据采集,将水压量转换成电压值,经过信号调理电路后,进行A/D转换并将转换结果送到DSP内,经微处理器与预设定水压进行比较后,得到误差量。该误差量与前一误差量又可得到误差的变化量e·,e和e·作为模糊控制器的输入,由软件中的自调整修正因子Fuzzy-PID控制算法子程序进行处理,通过DSP调用空间矢量脉宽调制(SVPWM)算法来控制,再将模糊控制器的输出经线性转换为频率f,逆变器输出相应频率,用于调节水泵电机的转速。当DSP检测到逆变器的输出频率接近工频电网频率时,将使能锁相环进行相位的检测和跟踪,当两者同相位时,由锁相环发出的相位锁定信号触发中断,DSP将此台水泵由变频运行状态切换到工频运行状态,并根据当前水压判定是否将下一台水泵投入变频运行状态。
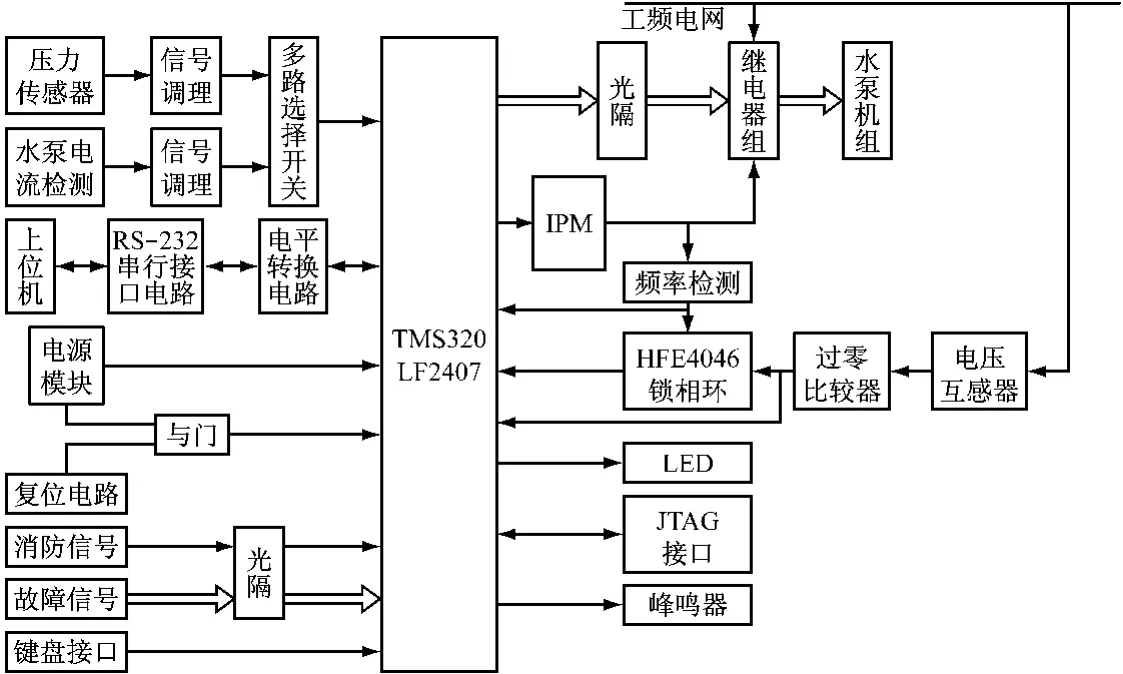
图1 供水控制系统硬件总体框图
2 系统软件设计
2.1 系统主流程图设计
该系统中,数据(压力信号、工频电网的电压、电机电流监控信号)采集、键盘输入、液晶显示、自调整修正因子Fuzzy-PID控制及锁相环同步切换控制都要靠软、硬件的配合才能实现。系统主程序完成的功能有:系统初始化、数据采集比较、LED显示、键盘扫描、故障处理、压力闭环控制、锁相环同步切换控制等。主程序流程图如图2所示。
2.2 Fuzzy-PID控制算法子程序设计
该程序主要实现采样系统的输出,得到当前的实际水压,该水压与压力设定值相减,可得到当前误差量,该误差量与前一误差量相减可得到误差的变化量,误差和误差的变化经过模糊量化,变成误差和误差的变化模糊子集的基本论域中的值,即可查询模糊控制表,得到模糊控制量,此模糊控制量作为控制量模糊子集中的基本论域中的值,必须乘以比例因子变成实际控制量,才能送给模数转换器去控制变频器,从而实现恒压供水,完成依次采样过程。其流程图如图3所示。
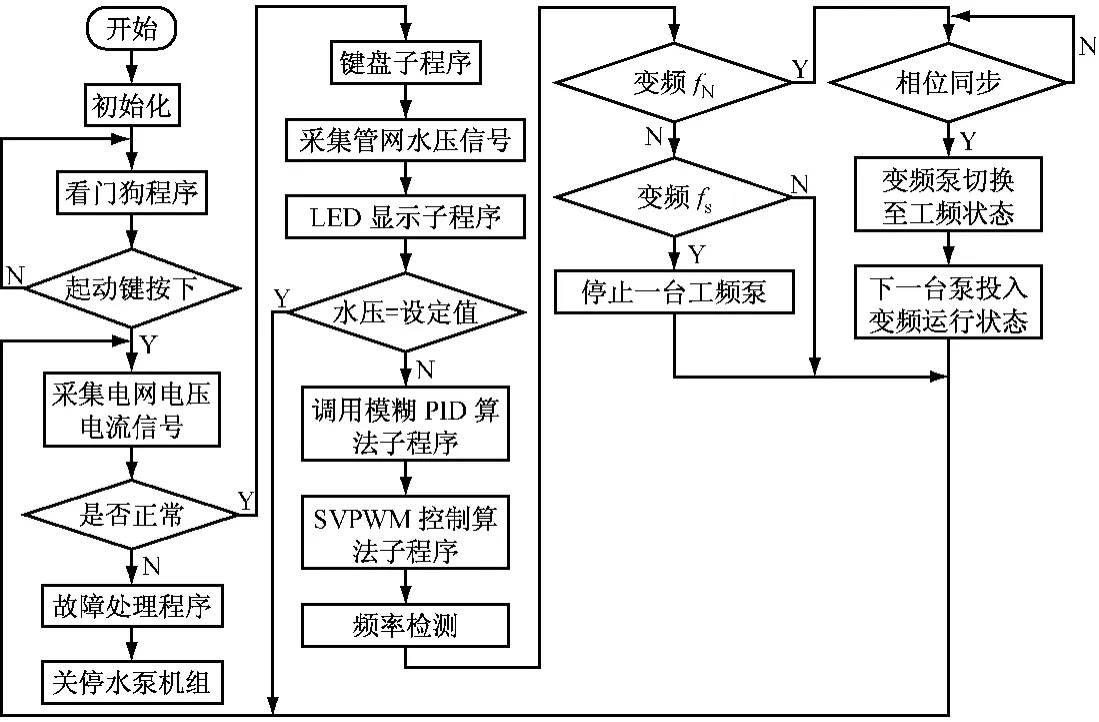
图2 供水系统主程序流程图
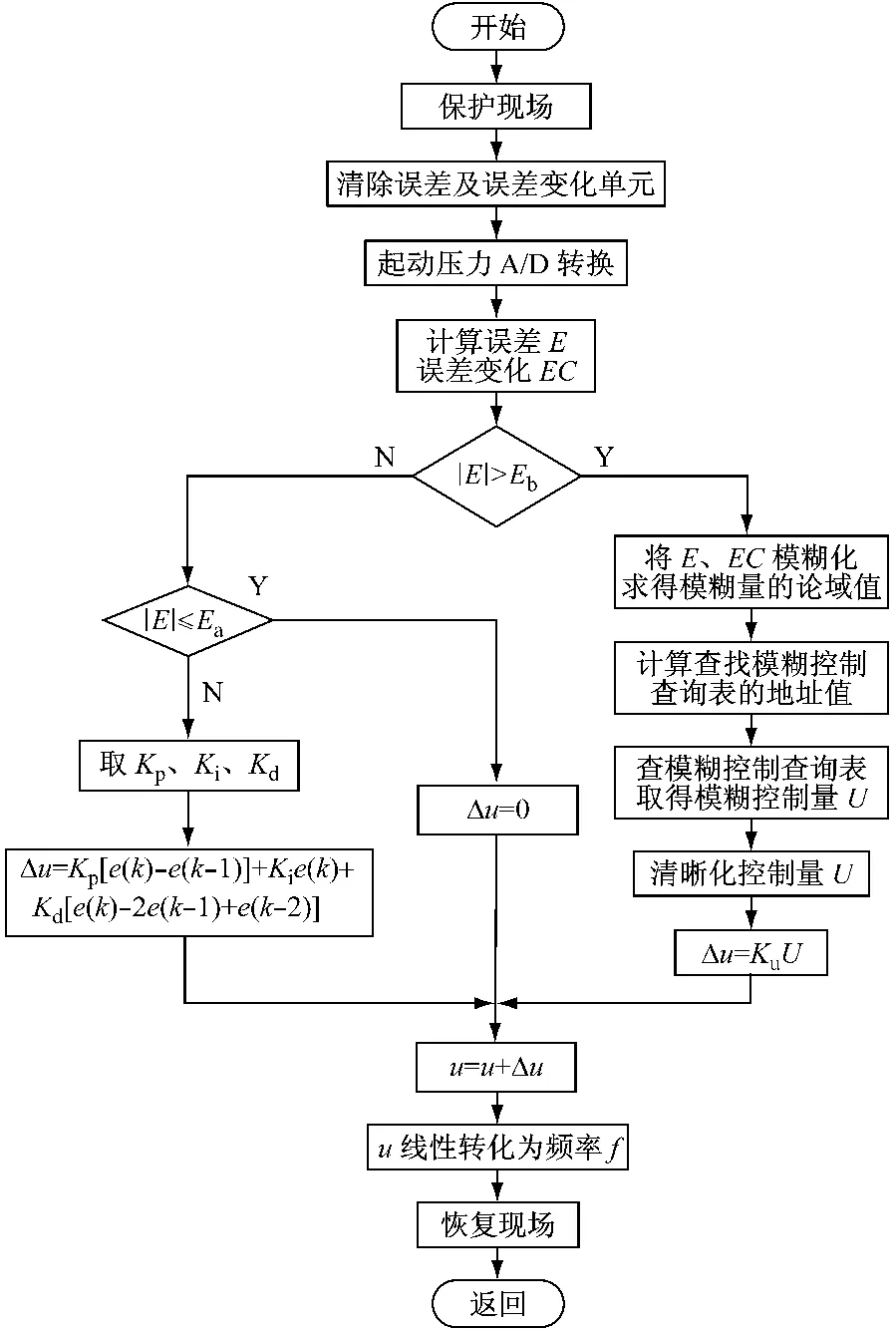
图3 Fuzzy-PID控制算法子程序流程图
3 恒压供水系统的数学模型建立及模糊自适应控制器设计
一般供水系统中,中、大功率的水泵由三相笼型异步电机驱动,三相异步电动机的数学模型是一个高阶次、非线性、强耦合的多变量系统,再加上供水管网管阻特性具有死区和非线性,使得供水系统的数学模型具有高阶次、非线性、大滞后、强耦合、多变量、参数时变等特点,难以得到有效的解析式数学模型;而且供水管网中水管铺设复杂,弯管多,使其参数变化无常;用水高峰期和低峰期没有规律。由于供水系统管道长、管径大,管网的充压较慢,故系统是一个大滞后系统。若只采用简单的PID控制,将使系统的动态性能较差,不仅调节时间长,还可能出现较严重的超调和振荡,甚至使系统变得不稳定,只用简单的PID算法显然不能使系统具有很好的动态性能。但对于这种参数变化无常的系统,模糊控制能很好地体现其优越性。模糊控制是处理不确定对象的有效方法之一,而且模糊控制不需要建立严格的数学模型,能克服工业控制过程中非线性、时变性等因素的影响。但其控制规则基于人们对过程的信息归纳和操作经验的总结。因此,模糊控制具有一定的主观性,导致了控制的不精确性。另外,模糊控制中的运算量很大,并受模糊化的等级限制,影响了控制精度。针对以上存在的问题,本文提出将PID控制与模糊控制相结合,形成复合控制的解决方案。模糊控制具有良好的动态性能,PID控制具有良好的静态性能,两者相结合,取长补短,达到最佳效果。
3.1 供水系统的近似模型
由供水系统的特性可知,水泵由初始状态向管网供水的恒压状态过渡时,一般可分为压力上升过程和恒压过程。压力上升过程,近似为一个大时间常数T1的一阶惯性环节;恒压过程中,压力可认为基本保持不变,是一个纯滞后过程。变频器和电机可近似等效为时间常数为T2的一阶惯性环节。因为在异步电机变频调速系统中,低频段由于电阻、漏电抗的影响,电动机的起动转矩随频率的降低而减小,为了缩短起动时间,就要选择最佳的起动频率,以使起动转矩最大而电流尽可能小。一般电动机的最佳起动频率在12.5~25 Hz的范围内,在最佳起动频率之前的频段是系统的死区范围。系统中其他控制和检测环节,如继电器控制转换、压力转换等的时间常数和滞后时间与原供水系统执行机构的时间常数和滞后时间常数相比,可忽略不计,均可等效为比例环节。因此,供水系统的数学模型可等效为带纯滞后、死区的两个惯性环节串联,如式(1):

式中:K——系统的总增益;
T1——系统的惯性时间常数;
T2——变频器和电机时间常数;
τ——系统纯滞后时间。
3.2 自调整修正因子Fuzzy-PID控制器的设计
恒压供水系统控制策略选择是根据系统的信息,判断是采用自调整修正因子模糊控制,还是采用PID控制,控制策略选择的基本原则是:以水压实际测量值与设定值误差的大小作为选择的条件,在大误差范围内,采用自调整修正因子的模糊控制,以提高动态响应速度,增强自适应能力;在小误差范围内,采用PID控制,以消除静态误差,提高控制精度。同时,在系统允许误差范围内,系统规定不做切换,维持上一次的动作。自调整修正因子Fuzzy-PID控制系统如图4所示。控制策略选择的具体情况如下:
(1)以误差E的大小作为自调整修正因子模糊控制与PID控制的切换条件,|E|=Eb为切换点;
(2)在大误差范围内(|E|>Eb),采用自调整修正因子模糊控制,以提高系统的动态响应速度,同时随误差的变化自动调整修正因子,从而增强系统的自适应能力;
(3)在小误差范围内(Ea<|E|<Eb)采用PID控制,以消除静态误差,提高控制精度;
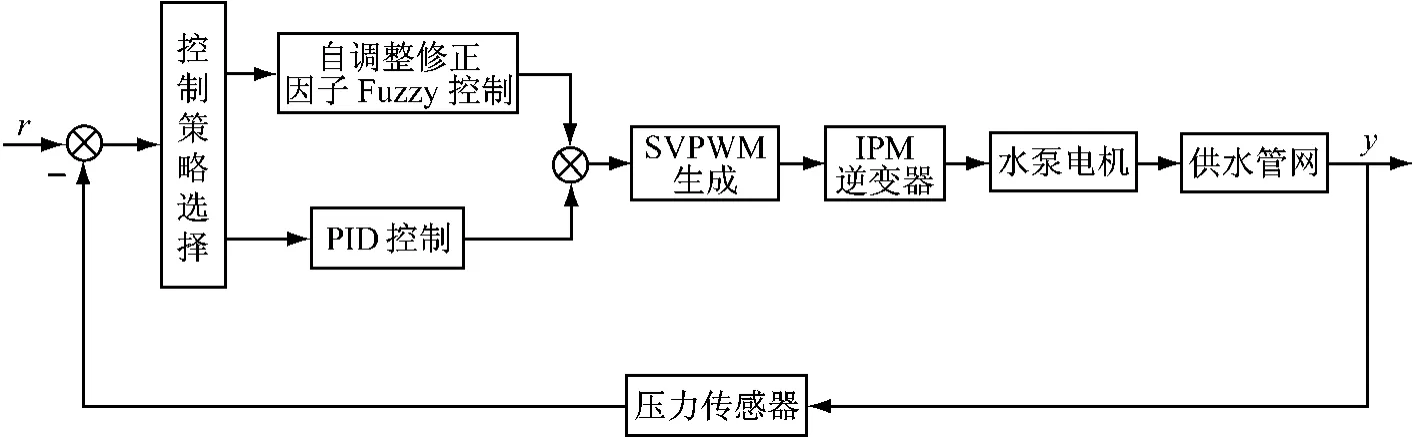
图4 自调整修正因子Fuzzy-PID控制系统
(4)在系统允许的误差范围内(|E|≤Ea),系统保持上一次的动作。
自调整修正因子Fuzzy-PID控制器的实际输出为
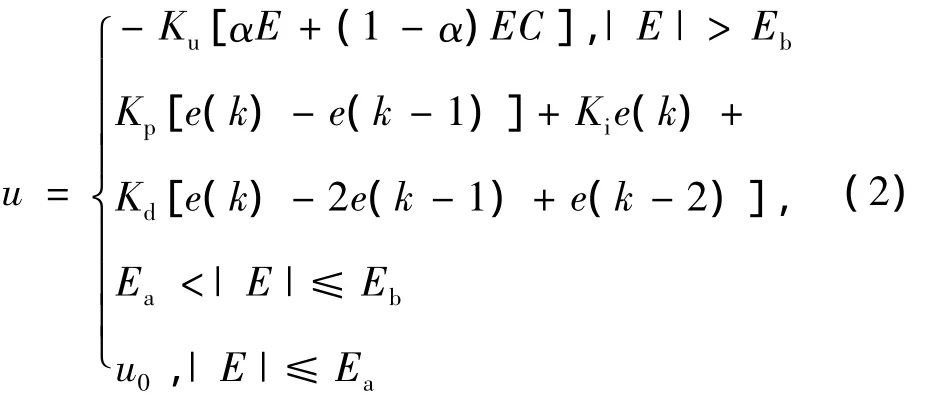
其中:α=(αs-αo)|E|/N+αo,0<αo<α <αs<1;且定义E、EC、U的论域:{-N,…,-1,0,1,…,N},N=7;|E|=Eb为水压控制切换点;|E|≤Ea为供水系统误差指标;
uo——系统上一次的动作;
Ku——输出控制量的比例系数;
Kp、Ki、Kd——比例、积分、微分系数;
e(k)——第k次采样的水压实际测量值与设定值的误差。
3.3 仿真结果
为了仿真自适应模糊控制器,本文借助于MATLAB中的Simulink和模糊推理工具箱Fuzzy Inference System Toolbox对所设计的供水系统性能进行仿真。在该仿真系统中,假设供水压力为0.5 MPa,系统的传递函数为

其中,死区时间T3=0.8 s,在 PID控制中,Kp=0.08,Ki=0.025,Kd=0.04;在模糊控制中Ke=7,Kec=2.5,Ku=0.45;在 Fuzzy-PID 控制中,Kp=0.1,Ki=0.022,Kd=0.02,Ke=60,Kec=2.45,Ku=0.6。PID 控制、模糊控制、Fuzzy-PID 控制的Simiulink的仿真框图及其控制效果分别如图5、6 所示。
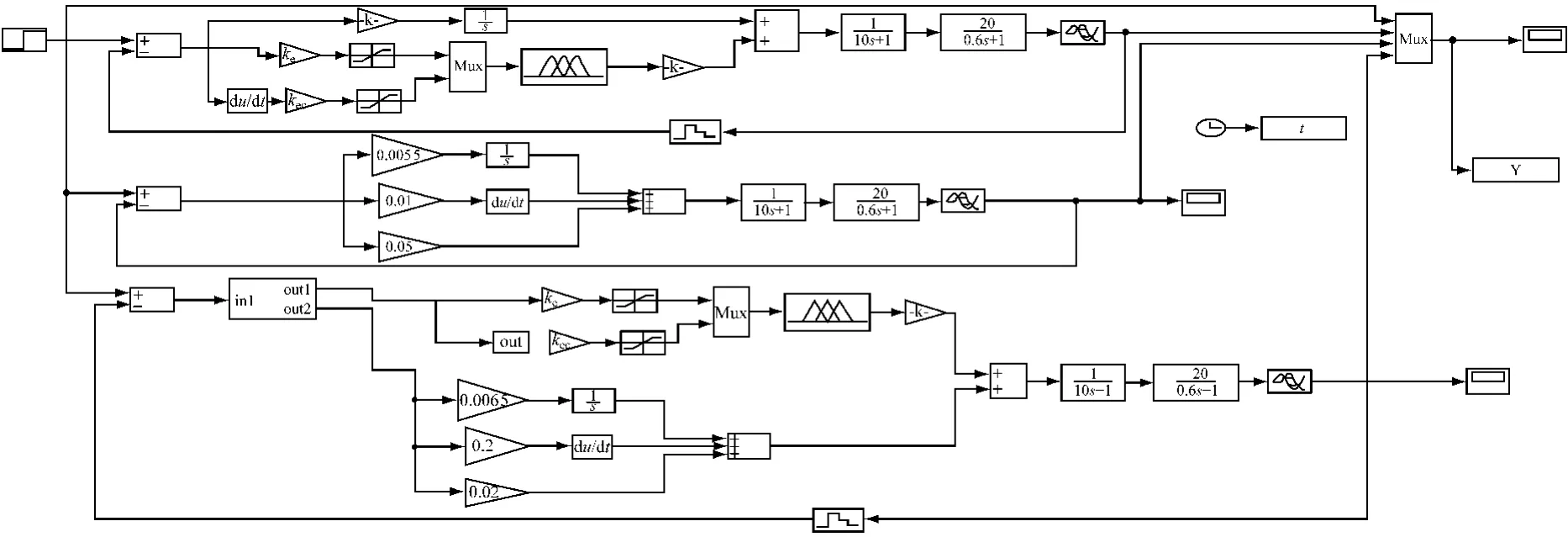
图5 PID控制、模糊控制、Fuzzy-PID制仿真框图
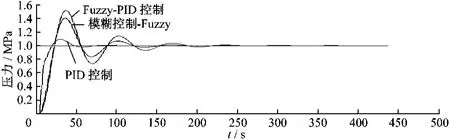
图6 PID控制、模糊控制、Fuzzy-PID控制的水压调节过程
3.4 仿真结果分析
从仿真结果来看:PID控制的调节时间长,超调量大;模糊控制的调节时间、超调量等性能明显优于PID控制;自调整修正因子Fuzzy-PID控制的超调量小、上升时间短、稳态精度高,控制效果较单一的PID控制和模糊控制有明显提高。该控制方式不仅具有快速的动态响应速度和良好的控制精度,而且当对象参数和结构发生变化时,具有良好的鲁棒性和适应能力。
4 结语
本文在分析变频恒压供水系统的研究现状的基础上,设计了一种基于DSP的模糊恒压供水系统,介绍了该系统的软、硬件结构,并建立了恒压供水系统的数学模型,在此基础上设计了一种自适应模糊PID控制器,并将该模糊控制器应用于变频恒压供水的模糊控制系统,且利用MATLAB仿真工具仿真了该自适应模糊PID控制器的性能,仿真结果表明使用模糊PID控制的恒压供水系统的稳定性较其他两种算法优越。
[1]Davidl T W Chan,Vvujiu Li.Design and implementation of a variable frequency regulatory system for water supply[J].IEEE Trans Automat Contr,AC-48,1996:2095-2098.
[2]Bryan Coulbeck,Bogumil Ulanicki.Pressure control of a moscow water supply system using expert system technology[C]∥Proceedings of the 35th IEEE Conference on Decision and Control,Kobe,Japan,1996(4):4498-4499.
[3]M EI Belkacemi,A Lachhab,M Limouri,et al.Adaptive control of a water supply system[J].Control Engineering Practice,2001,9(3):343-349.
[4]罗贵隆.变频技术在恒压供水系统中的应用[J].自动控制,2007(2):23-24.
