永磁同步电机交流伺服系统的研究与应用
2010-08-28严伟灿周立新刘栋良
严伟灿, 周立新, 刘栋良
(卧龙电气集团股份有限公司,浙江上虞 312300)
0 引言
随着装备自动化水平的不断发展,伺服系统的应用越来越广泛,数字信号处理器(DSP)技术的发展和应用[1-2],对于诸如运动控制领域所要求的电机高性能控制,全数字化交流伺服技术起到了巨大的推动作用,提高了系统的速度、精度、可靠性及抗干扰能力。
相比于正弦脉宽调制(SPWM),空间矢量脉宽调制(SVPWM)技术具有电压利用率高等优点[3-4],在交流变频调速系统上应用广泛[5],同样广泛应用于各种交流伺服系统。本文介绍一种以TMS320F2810为控制核心、永磁同步电动机(PMSM)为执行机构,采用SVPWM的交流伺服系统。该系统具有体积小、重量轻、功耗低、调试方便等优点,可以实现对PMSM交流伺服系统的速度、位置、转矩的精确控制。系统大致可分成两大板块,即以TMS320F2810为控制核心的控制板块和以智能功率模块(IPM)为驱动核心的功率驱动板块,外加一些辅助设备,如D/A显示人机界面、键盘和显示单元等。
1 系统的硬件结构
1.1 主电路
主电路包括功率逆变器供电电源、功率逆变和电源保护。考虑到单相和三相都能够使用,整流器选择的是30 A/600 V三相不可控整流模块。三相(或单相)AC输入,经整流桥后的母线直流电压给下一级逆变桥供电,同时加以软起动电路进行上电瞬间的电容保护。
1.2 IPM
IPM功率逆变器的功能是根据控制电路的指令,将电源单元提供的高压直流电转变为伺服电机定子绕组中的三相交流电,以产生所需电磁转矩。主回路采用集驱动电路、保护电路和功率管于一体的IPM,这种集成结构减小了走线引入的分布电感,器件的开通和关断具有更好的一致性。与普通的绝缘栅双极晶体管(IGBT)模块相比,由于集成了驱动和保护电路,使得系统的硬件电路设计和开发变得简单、可靠。本系统选用三菱公司的PM20CSJ06,其耐压为600 V,额定电流为20 A,最高开关频率为20 kHz。
1.3 控制模块
本系统以TMS320F2810为控制核心,外加一些外围辅助电路,来完成对PMSM的控制。
1.3.1 电流检测
电机电流由LEM电流传感器检测后,得到成比例的模拟电压信号,其幅值在-3~+3 V之间呈正弦波动。DSP内部只能处理单极性的输入信号,对A/D采样时需增加电压抬高电路,从而使电压变换在0~3 V之间,供DSP采样来检测电流的信号。
1.3.2 位置转速检测
系统采用复合式光电编码器,两路正交脉冲信号A、B,一路零位脉冲信号Z,实现速度及位置反馈;另外,三路相差120°的初始位置脉冲信号(U、V、W)实现初始位置的定位,同时为了实现符合DSP所要求的3.3 V,这六路信号(A、B、Z、U、V、W)都经过74LVTH244A,再分别接到 DSP的捕获端口(CAP1~CAP6)和通用I/O端口(IOPA13~IOPA15)。
1.3.3 空间矢量脉宽调制
作为电力电子装置的核心技术,PWM技术被广泛应用于变频调速电机传动中。
PWM技术中应用最为普遍的是SPWM和SVPWM。实践和理论证明,与SPWM技术相比,SVPWM方式具有高次谐波更低和电压利用率高等优点,因此越来越受到人们的重视。如图1所示,通过开通Ua和Ub不同的时间,使其两个合成电压矢量等效于参考电压矢量Ur。

图1SVPWM矢量图
在DSP中实现SVPWM算法,该算法得到的基波电压经PWM口输出后的波形(外接滤波电路)如图2所示。图中曲线1、2为基波相电压波形,其最大幅值为UDC/,曲线3为曲线1减曲线2所得到的基波线电压波形,从图中可以看出SVPWM属于双波头调制,输出的线电压波形为正弦波,与 SPWM(其基波最大相电压幅值为UDC/)相比,提高了电压的利用率。
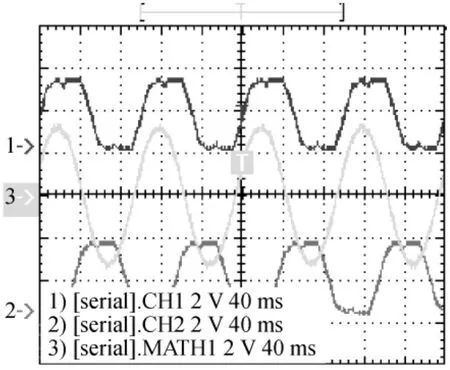
图2 相电压与线电压的实测波形
2 系统的软件结构
根据通用伺服软件功能,设计如下控制方式:位置控制、速度控制、转矩控制及其他组合控制方式。其软件基本框图如图3所示。DSP软件程序主要包括:主程序初始化;数据采集程序;外部接口程序;通信程序;定时器中断程序等。定时器中断程序主要包括以下几个功能模块:速度计算、电流计算、坐标变换,转子位置计算、PID控制算法等。图4为定时器中断子程序流程,它是整个电机控制的核心。
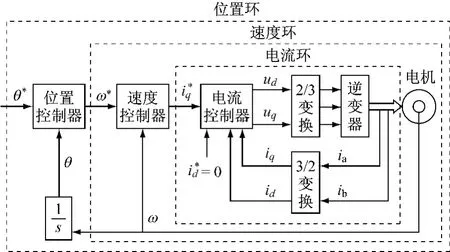
图3 系统软件结构
3 系统实证波形
本文在卧龙伺服产品上进行了实证,图5为6 A的两相电流波形,纵坐标每200 mV代表5 A,图6为1 200 r/min下的转速波形,纵坐标2 V代表600 r/min,图7为位置θ角波形,一个锯齿波代表转子电角度360°。

图4 定时器中断子程序

图5 电机高速时两相电流波形

图6 电动机高速时的转速波形

图7 电动机高速时的位置波形
4 结语
基于TMS320F2810开发PMSM交流伺服系统,控制实现容易,从试验波形可以看出此系统具有良好的动、静态性能,适用于中小功率伺服系统,应用前景十分广阔。该产品已广泛应用于数控机床及各类自动化加工机械设备上。
[1]韩安太.DSP控制器原理及其在运动控制系统中的应用[M].北京:清华大学出版社,2003.
[2]张卫宁.TMS320C28X系列 DSP的 CPU与外设(上)、(下)[M]. 北京:清华大学出版社,2005.
[3]张润和,崔丽丽.基于MATLAB空间矢量脉宽调制方法[J].辽宁工程技术大学学报,2004(6):30-33.
[4]杨贵杰.空间矢量脉宽调制方法的研究[J].中国电机工程学报,2001(5):79-83.
[5]赵文祥.基于DSP的全数字矢量控制SVPWM变频调速系统[J].电机与控制学报,2004(5):35-37.
