模糊PID自整定控制方法在液压AGC系统中的应用
2010-08-23尹腾飞
尹腾飞,张 玉
YIN Teng-fei1, ZHANG Yu2
(1. 三一德国有限公司 德国研究院液压控制所,长沙 410100;2. 华北水利水电学院 数学与信息科学学院,郑州 450011)
0 引言
轧制过程是一个复杂的非线性过程,难以建立精确的数学模型,传统的线性控制方法(如PID控制),难以满足更高的板形板厚控制要求。模糊控制器作为一种近年来发展起来的新型控制器,其优点是不要求掌握受控对象的精确数学模型,而只需将操作人员(专家)长期实践积累的经验知识用控制规则模型化,然后运用推理便可对系统实现最佳调整。在轧机液压压下AGC(Automatic gauge control自动厚度控制)系统中,存在着滞后、时变及非线性等特点,由于常规的PTD控制不易实现此类过程的精确控制。本文将模糊控制和PID控制两者结合起来,扬长避短,既具有模糊控制灵活而适应性强的优点,又具有 PID控制精度高的特点。仿真结果证明了其有效性。
1 液压AGC系统的动态模型[1]
一个完善的液压AGC系统,除了位置闭环、力补偿环,还设有预控和出口板厚的监控系统。由液压放大元件和液压执行元件(缸、马达)或由液压放大元件(控制阀)所控制的伺服、比例变量泵和液压执行元件,及它们所控制的负载装置合称为液压动力元件或液压动力机构。
构成一个完善液压AGC系统的几种主要动态元件为伺服阀、液压缸、轧机负载、传感器和控制调节器。它们合称为液压动力元件。其动态元件定量描述如下:
通常,当液压执行机构的固有频率ωh低于50Hz时,伺服阀的动态特性可用一阶环节表示,伺服阀基本方程G1(s)

式中ωsv为伺服阀的固有频率,s拉普拉斯算子。伺服阀的固有频率ωsv可从伺服阀制造厂提供的频率响应曲线获得。
液压缸的基本方程G2(s)

式中ΔFp为作用于油缸无杆腔力的变化;ΔFb为作用于油缸有杆腔力的变化;ΔFL为控制容积内压力的变化;ΔFb为油缸有杆腔压力(背压)的变化;Ap为油缸无杆腔的工作面积;Ab为油缸有杆腔的工作面积。
轧机的基本方程G3(s)

式中Me为轧机运动部件的等效总质量(包括油缸);BP为油缸等运动部件的粘性系数;K为油缸等效负载刚度(包括上辊系、油缸等);FL为作用在活塞上的其它负载;xp为液压缸活塞的位移。
控制调节器G4(s)

式中,Kp、KI、Kd分别为PID控制器的比例、积分和微分常数。
背压回油管道G5(s)

式中,Pdo为初始背压;Ar为回油管道截面积;Mr0为回油管道中油液的质量;Rr为压力差系数。
传感器可视为惯性环节,故G6(s)
式中,Ks为位移反馈系数;Ts为位移传感器的时间常数。
近日,由全国打黑办挂牌督办的孟庆革等10人黑社会性质组织团伙案二审宣判:对孟庆革以组织、领导黑社会性质组织罪等8项罪名数罪并罚,判处有期徒刑20年,同时领刑的还有其前妻、与其同居多年的小姨子,儿子、外甥、舅舅、前妻侄女等一帮手下干将。(2018年7月8日央视报道)
根据液压AGC力闭环系统主要元件的方程,建立液压AGC控制系统动态模型,如图1所示。

图1 液压AGC系统力闭环的动态模型
2 模糊PID控制器的设计
本系统中的控制器设计结合系统特征采用模糊自整定PID的方法。
2.1 模糊控制器结构
模糊控制由模糊化、模糊推理及反模糊化三个过程。而模糊控制规则是基于手动操作人员长期积累的控制经验和领域专家的有关知识,它是对被控对象进行控制的一个知识模型。这个模型建立的是否准确,将决定模糊控制器的好坏。
利用模糊控制器对PID参数的在线自整定,其实现过程是:先找出PID三参数和误差与误差变化率之间的模糊关系,在运行中通过不断检测误差和误差变化,再根据模糊控制原理对上述三个参数进行在线修改,以满足不同误差和误差变化时对控制器参数的不同要求[2]。
2.2 自整定模糊PID控制器的设计
2.2.1 各参量隶属函数的确定
考虑到模糊控制器实现的简易性和快速性,本系统采用二维模糊控制器。选择偏差绝对值|E|及偏差变化绝对值|EC|为其输入语言变量,KP、KI、和KD为其输出语言变量。
设模糊控制器各语言变量的论域为:

输入语言变量|e|和|ec|的论域取语言值“大”(B)、“中”(M),“小”(S)、“零”(Z) 4种;输出语言变量KP、KI、和KD的论域也取语言值“大”(B)、“中”(M)、“小”(S)、“零”(Z)4种。
2.2.2 建立控制规则表
根据上述的参数整定原则及专家的经验,可列出相应的参数调节规则。
2.2.3 模糊推理
由模糊控制规则可知,将各参数调节规则表写成条件语句形式。如,KP的调节规则可以写成16条模糊条件语句:
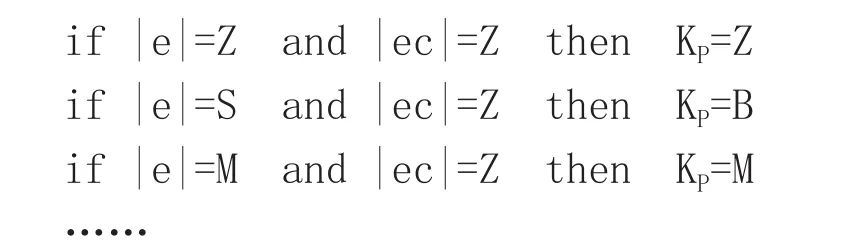
那么对于第一条语句规则的隶属度的计算为:

第二条语句规则的隶属度的计算为:

第三条语句规则的隶属度的计算为:

……
以此类推,可求得KP在不同的偏差|e|和偏差变化率|ec|条件下的所有模糊取值的隶属度。
将µKPi(i=1, 2, …16)进行合成,得出输出模糊量KP的隶属度为:

再将KP用重心法进行模糊判决,可得出参数KP的精确整定值。同理,可求出参数KI、KD的值。
2.2.4 模糊控制对AGC系统的动态仿真[3,4]
轧制过程中,轧件的入口厚度、轧机纵向刚度、油缸的初始行程(影响油液控制容积的大小及轧件纵向刚度)及轧件塑性刚度系数等参数随着轧制条件的变化而变化,这些因素对轧制厚度有不同的影响。通过仿真研究这些因素对轧制过程的影响,可为液压AGC系统的优化设计及轧制过程的动态模拟提供基础。在PID控制中,由于一些非线性等因素的影响,使得系统的跟踪消差能力受到影响,对此问题,我们将PID控制算法及模糊PID控制算法进行仿真比较。

图2 来料厚度发生变化时的输出辊缝

图3 偏心信号对输出的辊缝的影响

图4 库仑力对输出辊缝的影响
图2至图4为PID及模糊PID两种不同控制方式下几种因素的变化对输出辊缝的影响。
图中,曲线1为采用PID控制时各种因素变化时的输出响应,曲线2为采用模糊PID控制时各种因素变化时的输出响应,曲线3为轧件入口厚度。
3 结束语
由仿真结果可知,模糊PID的控制效果明显优于传统的PID控制效果。由此可知,将模糊控制与PID控制两者结合起来,扬长避短,既具有模糊控制灵活而适应性强的优点,又具有PID控制精度高的特点,这种模糊一PID复合型控制器,对复杂控制系统和高精度伺服系统具有良好的控制效果。
[1]行娟娟.轧机液压压下AGC系统数学模型及其控制方法研究[D].西安:西安理工大学,2004.
[2]韩峻峰,李玉惠,等.模糊控制技术[M].重庆:重庆大学出版社,2003.
[3]闻新,周露,李东江,贝超,等.MATLAB模糊逻辑工具箱的分析与应用[M].北京:科学出版社,2001.
[4]薛定宇,陈阳泉,著.基于MATLAB/simulink的系统仿真技术与应用[M].清华大学出版社,2002.
