基于机载LiDAR 数据构建的DEM 抽稀算法研究
2010-08-06缪志修王国昌
缪志修 齐 华,2 王国昌 程 昂
(1.西南交通大学信息科学与技术学院,四川成都 610031;2.西南交通大学土木工程学院,四川成都 610031;3.中铁二院工程集团有限责任公司测绘分院,四川成都 610031)
机载激光雷达(LiDAR)是取高精度和高密度地形数据的一种新的测量手段。LiDAR数据拥有的精度和密度使其在生成DEM数据方面的应用得到进一步的发展。然而,高密度的数据导致数据量的大幅增加,给数据的组织、处理、后期应用都带来了诸多不便。
在大多数情况下,对一个具体DEM项目来说,并不需要得到DEM表面所表达出来的全部信息,只需量测表达相应地表所需要的数据点,以达到一定的地形表面精度和可信度即可[1]。特别是在地势较平坦地区,不需很高密度的激光脚点。一般说来,采样的地形数据越密集,生成的DEM精度越高。但是,在LiDAR数据采集过程中,没有将地形类型和采样密度相匹配,过度采样是不可避免的,结果增加了数据存储量和处理时间[9]。因此,如何有根据地进行地形数据抽稀(如信息含量与数据集容量的比例),得到一个更易于处理和操作,用于DEM生成的地形数据集,具有重要的实用价值。
数据抽稀的主要目的是在采样密度和数据精度之间达到一种最优平衡,以此来得到一个有效的高精度DEM。考虑到不同数据元素对生成的DEM精度有不同的贡献,数据抽稀应该遵循保留关键要素,去掉次要元素的原则[8]。
1 国内外研究情况
目前国内外关于LiDAR数据构建DEM抽稀的算法可以归结为以下几种方法:基于非选择性的数据抽稀、基于TIN的数据抽稀、基于距离及角度的数据抽稀等。
1.1 基于非选择性的抽稀算法
基于非选择性的数据抽稀,主要包括两种:第一种是基于格网的数据抽稀。基于格网的数据抽稀是将输入的所有数据建立虚拟格网,然后只保留虚拟格网内一个数据点。其中虚拟格网的大小要依据数据点的密度来设定,如果数据点的密度达到每平方米几个点,则可以设定格网大小为1 m。这种算法虽然比较简单,但无法顾及到地形特征,这将一定程度上降低数据的精度。该方法随压缩程度的增加,特征点被删除的可能性也增加,可能丢失关键数据信息。目前,这种方法一般只应用到对精度要求较低的工程项目上。
另外一种是基于系统的抽稀。在系统抽稀中,对于一个大样本N,首先确定抽样间隔,比如每隔10个点作为抽样间隔,然后在这10个样本点中随机选择一个样本数据点。该方法和基于虚拟格网的方法一样,不能很好地保留地形特征。这种方法主要用来做快速显示,比如在TerraScan软件中就采用该种方法来快速查看点云数据。
1.2 基于Tin的抽稀算法
基于非选择性抽稀不能很好的保留地形特征,在一定程度上降低了DEM精度。为了能够更好地保留地形特征,有学者提出了基于Tin的抽稀方法。刘春等提出的基于Tin的抽稀方法的算法原理是利用已经建立好的不规则三角网模型,然后依据平坦区域上的点构成三角网包含的信息量最少,同时这些三角形构成面的法线向量也就趋近于平行,也就是说法线向量的夹角越小。利用三角网的这个性质可以实现对DEM数据的抽稀[3]。
该算法能够较好的保留地形特征点。但是,该算法在判断一点是否去除时,需查找包含该点的三角面,判断不同三角面之间的夹角,这在一定程度上降低了数据处理的速度。
1.3 基于距离及高差的抽稀算法
美国PAMELA S.LAFONTAINE女士提出的DDR(Data Density Reduction)算法主要依靠两个参数:搜索半径及高差阈值。搜索半径也就是搜索的水平距离,用来判定满足指定半径邻域内点云数据。这个参数主要控制抽稀的程度;高差阈值也就是点云数据之间的垂直距离,主要用来控制是否接收点,也就是控制抽稀的精度。如果在给定邻域内的一个点的高程值和中心指定点的高程小于给定的高差阈值,则可以认为这些点中存在冗余数据[10]。
该算法能够较好地保留地形的特征,其保留地形特征点的能力介于基于非选择性的抽稀方法和基于TIN的抽稀方法之间。由于该算法不断的搜索一定半径范围内的数据点,如果数据量过大,会在很大程度上降低数据处理速度。因此需采用一种策略,即将原始数据分成一系列的小块,则在搜索一定距离范围内的数据点时,只需搜寻该块以及与该块相邻的其他数据块,并不用搜索所有的数据块。这样将会提高数据的处理速度。
2 基于地形坡度的抽稀算法
以上的几种算法中,基于非选择性的抽稀算法不能够很好的保留地形特征信息,即地形变化幅度大的地形与地形变化幅度较小的地形同等地受到削弱。而基于TIN的抽稀算法和基于角度及距离限制的抽稀算法,对于不同的地形在运行时采用相同的参数,一般较难得到理想的结果。
为了考虑能够对不同地形的DEM进行数据的抽稀,本文提出了基于地形坡度的抽稀算法。该算法思想如下:首先利用所有的数据构建TIN,为了判断一个数据点是否保留(如图1中的P点),则需判断以该点相邻所有三角面(如图1中与P点相邻的三角形有5个)的坡度。如果这些三角形中的最大坡度值与最小坡度值之差大于给定的阈值,则认为这个点对地形的影响较大,需保留。
地形是比较复杂的,可以根据坡度与高差的不同将地形分成平原、丘陵、山地以及高山地[7]。如表1所示,可将地形的坡度分成四个段:第Ⅰ坡度段为0~2°;第Ⅱ坡度段为2°~6°;第Ⅲ坡度段为6°~25°;第Ⅳ坡度段为大于25°。因此,本文提出根据不同地形的坡度段来设置抽稀阈值,即每个坡度段设置相应的抽稀阈值。LiDAR数据构建的DEM数据点的平均间距约为1 m,则与P点相邻的三角形所构成的面积一般在4 m2左右。在这个小区域面积的范围内,可以通过求得该点相邻三角面的平均坡度,来判断该局部区域坡度属于哪个坡度段。比如该点相邻的所有三角面的平均坡度小于2°,则可以认为该局部区域是属于较平坦的地形,则最大坡度差将和第Ⅰ坡度段设置的抽稀阈值进行比较。同理,如果与该点相邻的所有三角面的平均坡度在2°~6°之间,则最大坡度差将和第Ⅱ坡度段设置的抽稀阈值进行比较。

表1 根据坡度和高差的地形分类
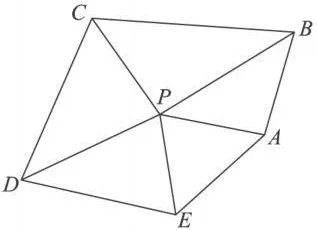
图1 与P点相邻的所有三角形
算法步骤如下:
(1)读入所有的数据点,生成不规则三角网。
(2)在生成的三角网数据点中,读入第一个数据点,并查找与该点相邻的三角形。
(3)在找到的所有三角形中,计算每个三角面的坡度。
(4)求得这些三角面的平均坡度。
(5)计算这些三角面的最大坡度和最小坡度,并求得最大坡度和最小坡度之差,即最大坡度差。
(6)如果最大坡度差为零(如图2所示),则需判断该点到所在投影三角面的距离(如图3中E点到△ABC的距离),如果这个距离大于给定的阈值,则保留这个点。

图2 与E点相邻三角面最大坡度差为零的局部地形
(7)如果最大坡度差不为零,判断平均坡度的大小,以此来判断该局部区域坡度属于哪个坡度段。如果属于第Ⅰ坡度段,则最大坡度差将和第Ⅰ坡度段设置的阈值进行比较;同理,如果属于第Ⅱ坡度段,则最大坡度差将和第Ⅱ坡度段设置的阈值进行比较。
(8)继续读入三角网数据中的下一个点,直到所有的数据点都进行了判断。
算法流程如图3所示。
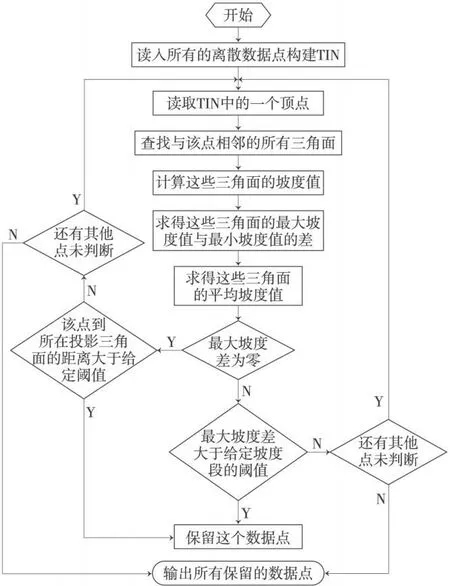
图3 基于坡度抽稀算法流程
3 多种抽稀算法实验分析
3.1 实验区域数据介绍
为了能更好的说明不同的算法对抽稀后DEM精度的影响,本节的实验都采用以下数据,如图4所示。该试验区数据位于中国西部某省,数据点个数为6 923个,面积大小为29 640 m2,激光点间距为1.2 m,海拔高度在608.71~624.09 m之间。该实验区域数据的地形晕渲图如图5所示。

图4 点云数据

图5 该区域地形晕渲
3.2 精度评定方法
本次实验的精度评价方法如下:
(1)采用ArcGis9.2地统计分析模块,利用该模块从原始数据7 287个点中抽取5%的数据点,即364个数据点作为样本点。剩下的6 923个点作为测试点。
(2)对测试点进行抽稀,利用抽稀后的数据点内插出这364个样本点的高程。不同的内插方法对DEM的精度影响是不同的,本实验的内插方法为基于TIN的线性内插方法。
(3)通过计算,内插出样本点高程和实际高程的标准差和中误差来实现精度的评定。
3.3 基于非选择性抽稀方法的实验分析
基于非选择性的抽稀方法中,主要有基于系统抽稀和基于格网抽稀两种。
基于系统抽稀方法,本次实验分别将原始数据抽稀到9.995%,24.599%,33.323%和49.992%的程度。然后利用这些抽稀后的数据内插出这364个样本点的高程,通过计算实际样本点高程和内插样本点高程的中误差和标准差进行精度评定。表2显示了抽稀程度与DEM精度关系。

表2 DEM精度与抽稀率
从表2可以看出,当抽稀程度大于49.992%时,其中误差小于30 cm。图6显示DEM精度与抽稀程度之间的关系,从图6可以更好的看出采用该种方法时,当抽稀程度大于50%时,其DEM精度变化幅度是较小的。
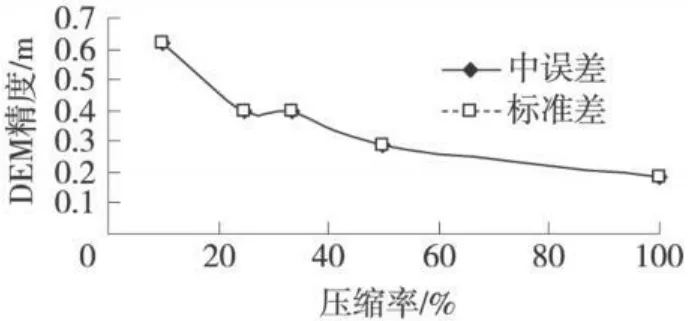
图6 DEM精度与抽稀率
基于格网的DEM数据抽稀,本次实验将原始数据抽稀到9.54%,24.931%,41.167%,54.817%,74.707%的程度。表3显示了抽稀程度与DEM精度关系。

表3 DEM精度与抽稀率
从表3可以看出,当抽稀率大于41.167%时,其DEM精度小于25 cm。而从图7中可以看出,当抽稀率大于40%时,其精度变化幅度也是较小的。

图7 DEM精度与抽稀率
3.4 基于Tin抽稀方法的实验分析
基于Tin抽稀方法,本次实验分别将原始数据抽稀到10.169%,24.353%,40.647%,54.759%和74.534%的程度。表4显示基于Tin方法得到的数据抽稀率与DEM的精度关系。
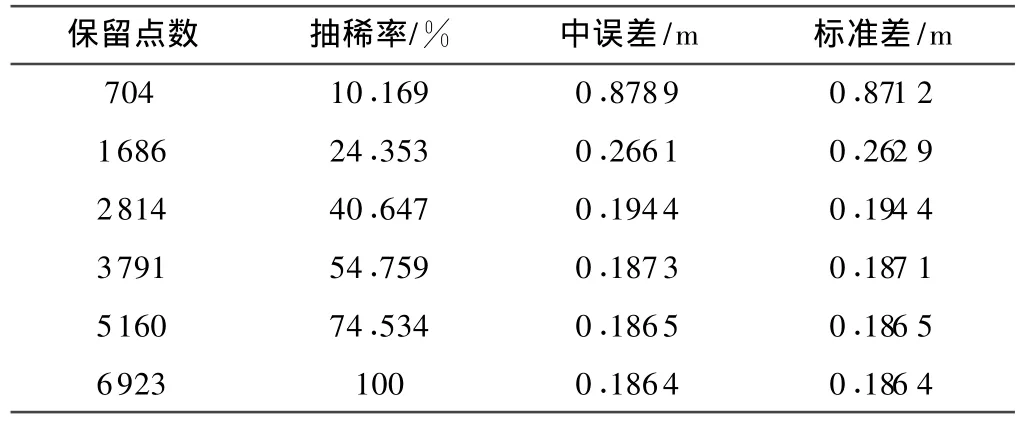
表4 DEM精度与抽稀率
从表4可以看出,当抽稀率大于40.647%时,其中误差小于20 cm。而从图8中可以看出,当抽稀率大于28%时,其DEM精度的变化幅度较小。
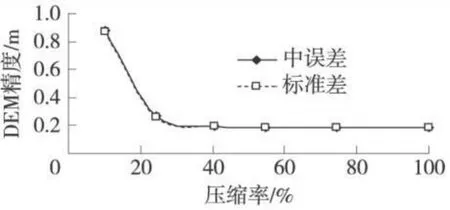
图8 DEM精度与抽稀率
3.5 基于距离及高差抽稀方法的实验分析
基于距离及高差抽稀方法,本次实验分别将原始数据抽稀到9.518%,23.154%,43.232%,55.120%和75.501%的程度。表5显示基于距离及高差抽稀方法得到的数据抽稀率与DEM的精度关系。
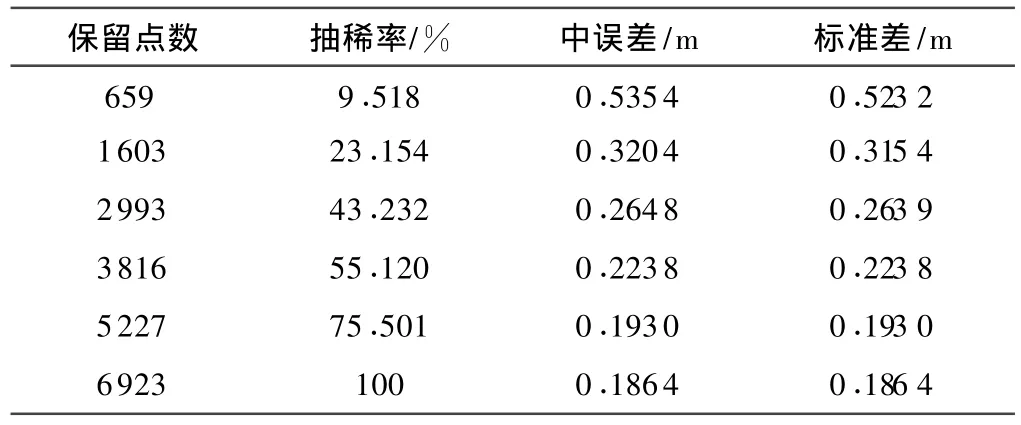
表5 DEM精度与抽稀率
从表5可以看出,采用该算法时,抽稀率大于43.232%,其DEM精度小于28 cm。而从图9中可以看出,当抽稀率大于50%时,其DEM精度的变化幅度较小。
3.6 基于地形坡度抽稀方法的实验分析
基于地形坡度抽稀方法,本次实验分别将原始数据抽稀到13.606%,24.151%,39.000%,53.242%和71.053%的程度。表6显示基于地形坡度抽稀方法得到的数据抽稀率与DEM的精度关系。
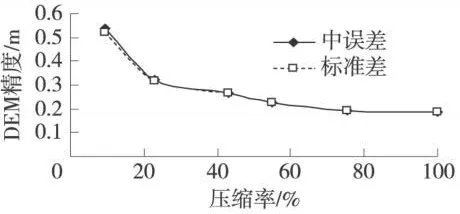
图9 DEM精度与抽稀率

表6 DEM精度与抽稀率
从表6可以看出,采用该算法时,抽稀率大于24.151%,其DEM精度小于23 cm。而从图10中可以看出,当抽稀率大于24%时,其DEM精度的变化幅度较小。

图10 DEM精度与抽稀率
3.7 各种不同抽稀方法综合比较
抽稀结果表明,无论数据抽稀到何种程度,丢失一些重要的信息是不可避免的,抽稀的目标是最大的降低数据的密度而损失最小的精度。采用一种合适的抽稀方法可以使本实验区域的数据在抽稀率达到25%时,其精度仍能好于23 cm。
为了能够更好的说明各种抽稀算法对DEM精度的影响,将以上的五种抽稀算法的抽稀率与DEM精度整合到一个图中,如图11所示。
从图11可以看出,当抽稀程度大于24%时,基于Tin的抽稀方法和基于地形坡度的抽稀算法得到的DEM精度的幅度变化很小,而这时的生产效率能提高到4倍。这是由于采用该方法能够较好的保留地形特征信息。而采用格网或是基于距离及高差的抽稀算法当抽稀率大于50%时,其DEM精度变化幅度也较小。而基于系统的抽稀方法,整体上得到的DEM精度较其他方法低。同时可以从图中看出,当压缩率大于90%时,各种抽稀算法所得到的DEM精度基本相同。

图11 各种抽稀算法的DEM精度与抽稀率
4 基于坡度抽稀算法应用于委内瑞拉数据实验
该实验区数据位于委内瑞拉中部,属于地势平坦地区,数据点个数为1 669 465个(如图12所示),面积大小为420 m×8200 m,激光点平均间距为1 m,海拔高度在147.56~176.39 m之间。该实验区域数据的地形晕渲图如图13所示。

图12 点云数据
图13 该区域地形晕渲
为了能够更快的处理数据,在做实验之前采用TerraSolid软件将该实验数据分成7块,如图14所示。其中A1块的实验数据为176 199个点,A2块实验数据为207 201个点,A3块实验数据为215 372个点,A4块实验数据为216912个点,A5块实验数据为258 952个点,A6块实验数据为284 807个点,A7块实验数据为310022个点。
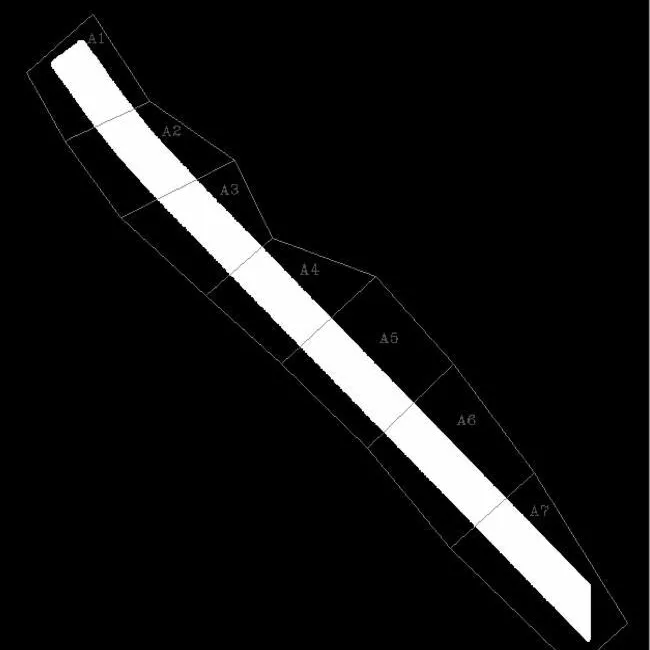
图14 数据分块
实验结果及精度分析见表7。
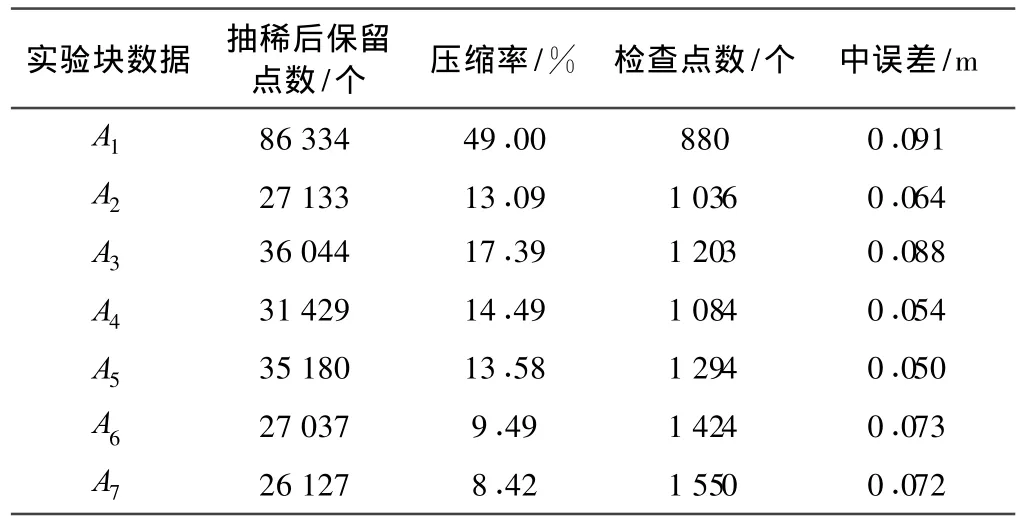
表7 各数据块DEM精度与抽稀率
经过抽稀后该实验区域的数据变成269 284个点,压缩率达到16.13%,而从表7的中误差可以看出,各数据块中误差都低于10 cm。实验区域的工程精度要求是不低于10 cm,因此,对此数据压缩到16.13%时仍能满足精度要求。
抽稀后的实验数据如图15与图16所示。
图15 压缩后点云数据

图16 压缩后该区域地形晕渲
5 结论
机载激光雷达技术为生成高精度的DEM提供了一种有效的方法。然而,由于采用该技术生成的DEM数据量十分庞大,对数据的存储和处理带来不便。数据抽稀的目的是去除DEM数据中的冗余数据,从而提高数据存储和处理的效率。通过对几种抽稀算法的实验,表明基于坡度的抽稀算法能够得到较好的结果。同时通过实验验证得出,由机载激光雷达数据构建的DEM能够承受一定的抽稀,而仍保持一定的精度。采用基于坡度的抽稀方法对委内瑞拉数据进行抽稀,实验结果表明,对此数据抽稀到16.13%时,仍能满足精度的要求。在DEM数据抽稀中,地形特征信息对描述地形表面特征具有重要的意义。因此,在DEM抽稀中如果能考虑地形特征信息,将会在减少数据量的同时而仍能保持较高的精度。
[1]李志林,朱 庆.数字高程模型[M].武汉:武汉大学出版社,2003
[2]刘经南,张小红.激光扫描测高技术的发展及现状[J].武汉大学学报:信息科学版,2003,28(2):132-137
[3]刘 春,吴杭彬.基于平面不规则三角网的DEM数据压缩与质量分析[J].中国图像图形学报,2007,12(5):836-840
[4]徐景中,万幼川,张圣望.LIDAR地面点云的简化方法研究[J].测绘信息与工程,2008,33(1):32-34
[5]周兴华,姚艺强,赵吉先.DEM内插方法与精度评定[J].测绘科学,2005,30(5):86-88
[6]张小红.机载激光雷达测量技术理论与方法[M].武汉:武汉大学出版社,2007
[7]周启鸣,刘学军.数字地形分析[M].北京:科学出版社,2006
[8]Chou Y H,Liu PS,Dezzani RJ.Terrain complexity and reduction of topographic data.Geographical Systems,1999,1(2):179-197
[9]Liu X Z,Peterson J,Chandra S.The effect of LiDARdatadensity on DEM accuracy.Proceedingsof International congress on modeling and simulation,Christchurch,New Zealand,2007:1363-1369
[10]Pamela S.A data density reduction algorithm for post-processed airborne LiDAR bathymetric survey data.University of Florida,2000
