开关磁阻电机调速系统控制的研究﹡
2010-07-26王宏波付光杰
聂 彬,王宏波,付光杰
(大庆石油学院电气信息工程学院,黑龙江大庆 163318)
磁阻电机驱动系统(简称SRD系统),是随着电力电子、微电脑和控制技术发展起来的一种新型调速驱动系统,具有广阔的发展前景[1]。本文主要探讨开关磁阻电机调速系统的构成及控制策略。
1 开关磁阻电机调速系统的构成
SRD是开关磁阻电动机和电力电子技术相结合的机电一体化装置,系统组成如图1所示。
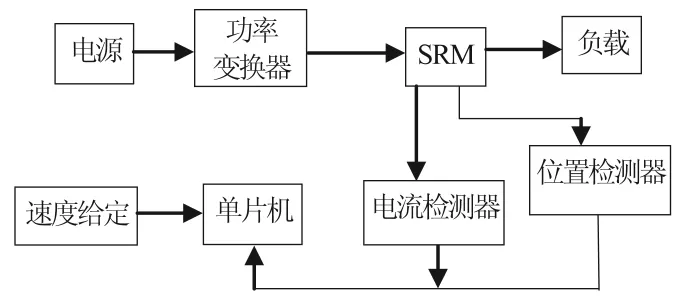
图1 SRD系统构成原理图Fig.1 The principle of SRD
(1)开关磁阻电机是系统中实现能量转换的部件,其工作原理遵循磁阻最小原理,即磁通总是要沿磁阻最小的路径闭合,由于磁场扭曲而产生磁阻性质的电磁转矩。顺序给A-B-C-D相绕组通电,则转子按逆时针方向连续转动。当主开关管S1,S2导通时,A相绕组从直流电源U吸收电能;而当S1,S2关断时,绕组电流通过续流二极管D1、D2,将剩余能量回馈给电源U。
影响转矩的不是电流方向而是相绕组的通电顺序。只要位置检测器能及时给出定转子极间相对位置,使控制器能及时准确地控制定子各相绕组的通断,就能使SRM产生所要求的转矩和转速。
(2)功率变换器是SRM运行时所需能量的提供者,是连接电源和电动机绕组的开关部件,一般采用快速绝缘栅双极型晶体管(IGBT)构成功率变换电路。
(3)控制器是调速系统的核心,一般由单片机或DSP单片可编程微处理器芯片构成。通过修改软件,可以很容易地改变电动机的工作方式和控制参数,实现系统不同的性能特点。

图2 开关磁阻电机的典型结构Fig.2 The typical structure of switched reluctance motor
(4)位置、电流检测器,位置检测器是转子位置及速度等信号的提供者。它及时向控制器提供定、转子极间相对位置的信号。
2 功率变换器的设计

图3 功率变换器Fig.3 Power converter
对于开关磁阻电机而言,主开关器件的选择应该基于以下原则:要满足系统电压、电流值的要求,并留有一定的裕量;为了降低系统损耗,要求主开关器件有尽可能低的导通压降和关断后的漏电流;为了提高系统运行的可靠性,有足够的安全工作区和二次击穿耐量;尽可能小的驱动频率,驱动方便。
通过比较和分析,在本论文中,采用的功率器件是绝缘栅双极型晶体管IGBT。本文控制对象为四相8/6极。
SR电机,选用H桥式功率变换器,结构简单、可靠,价格低廉。主开关器件为IGBT,采用三相桥式全波整流电路供。
功率变换器主电路如图3所示。图3中,A、B、C、D为SR电机四相绕组,V1~V5为IGBT功率器件,D1~D5为快恢复续流二极管,R1为限流电阻。C1、C2为滤波电容,其作用是对整流输出电压平滑滤波,并作相绕组能量回馈的元件。V5和R2构成制动放电电路,当SRM制动运行时,向功率电路回馈的电能多于从功率电路得到的电能。当电容发生过电压时,V5开关管开通,将电容能量泄放到电阻R2上。
IGBT的驱动电路采用专用驱动模块EXB841,它具有过流检测和过流软关断功能,可以实现对系统有效的保护。
3 SRD设计系统与控制策略
本系统中所控制的开关磁阻电机为四相8/6极,输出恒功率3kW,功率变换电路采用H型主电路形式,开关磁阻电动机速度控制系统的控制策略框图如图4所示。

图4 控制策略框图Fig.4 Control policy diagram
由SRM的准线性分析得到平均电磁转矩解析式为:

式中,m为电机相数;Nr为转子极数;Us为外加绕组相电压;为转速;为关断角;为最小电感开始随位置角变化的起始角;为开通角;Lmin为最小电感;Lmax为最大电感。根据上式可知,只需改变定子绕组电压Us,开通角与关断角就可以控制电机转矩大小,SRM有三种控制模式,即角度位置控制、电流斩波控制与电压控制。
该控制策略以电机输出的最终速度为控制目标,以PI调节及模糊调节为主要控制手段,采用双闭环结构的控制策略(外环为速度环,内环为电流环),速度环采用PI算法。变角度电压斩波组合控制方法的采用使速度外环反馈的速度与速度给定值产生偏差,通过速度调节器产生电流参考值,iref其值与电流反馈构成电流闭环控制,靠控制PWM的占空比来调节电流,以保证得到快速响应,并用模糊算法来调节开通、关断角度。控制器以恒定的斩波频率控制功率变换电路中主开关器件的开断,并通过调节开通和关断的时间比例,即占空比,来调节相绕组两端的平均电压,从而实现对绕组相电流的控制[2]。
在电机起动以后,速度达到一定,采用变角度电压斩波控制方式。在开关磁阻电动机绕组相电压Us、起始导通角和关断角这三个参数中,以相电压Us为系统的主控制量,在给定速度与反馈速度比较得到偏差,经速度控制器输出后,即由速度调节控制子程序计算出电流环的电流给定值,与电路的反馈值经PI及PWM控制策略输出控制量作为PWM电路的占空比给定值,确定下一个周期的PWM脉冲的导通占空比,控制一定频率的输出方波脉冲宽度,宽度被调制的方波脉冲信号加到基极驱动电路,控制IGBT的导通与关断,便将施加到SR电机绕组上的直流电压斩波成对应频率和占空比的方波电压,从而改变绕组两端电压的有效值,实现SR电机恒转矩转速控制;另两个参数作为辅助控制量,、是转速和相电流的函数,在运行中应不断加以调整,使系统性能优化[2]。由于开关角与系统参数之间的高度非线性关系,用传统数值方法求解非线性方程,以获得开关角的最佳导通方案较为困难。本文采取模糊控制方法来调节开关角、。
智能控制:控制SRM转矩的关键在于能够有效地控制电机绕组相电流的幅值和开通、关断的时刻。智能控制在数学本质上是一种从输入到输出的非线性映射关系,具有很强的自学习、自适应能力,非常适合于SRD控制。基于以转矩脉动最小为目标的自适应模糊控制策略的思路是:控制器以转矩和位置角为输入,以相电流为输出。控制器每隔一个采样周期对当前转子位置和观测转矩进行采样,由期望转矩和观测转矩形成转矩误差,依照学习算法实时改变隶属度函数,不断调整控制器的输出,即调整期望电流。控制器不依赖于电机的任何先验知识,能够适应电机的任何变化,对转子位置反馈误差具有较强的鲁棒性[3]。
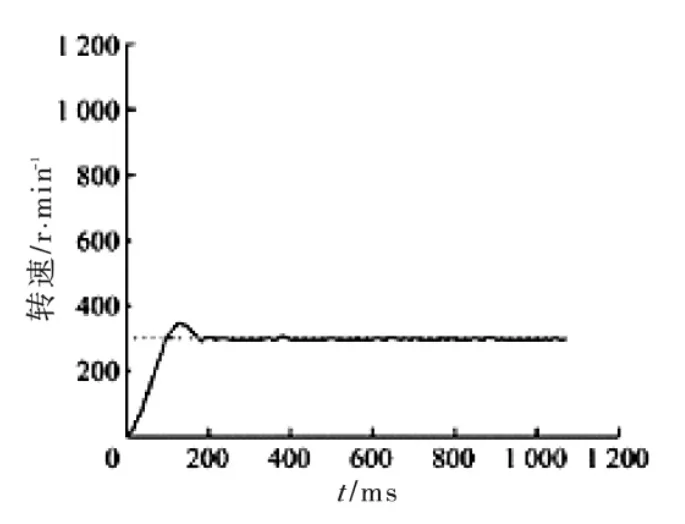
图5 转速300r/min实时跟随曲线Fig.5 Real time following curve(300r/min)

图6 转速500r/m实时跟随曲线Fig.6 Real time following curve(500r/min)

图7 转速1000r/min实时跟随曲线Fig.7 Real time following curve(1000r/min)
4 实验结果
系统实验对象为四相8/6极开关磁阻电机,额定功率为3kW,额定转速为1500r/min。设定转速为300 r/min、500 r/min、1000r/min时跟随曲线如图 5~7所示。由图可知,电机能快速跟上设定值。
结果表明,该电机具有良好的调速性能,调速范围满足要求,由于采用了高速变角度电压斩波—低速定角度电流斩波的控制方法,电机稳定性和抗干扰能力有所加强。
5 结 语
虽然与一般电机传动系统相比,开关磁阻电动机驱动系统是一个复杂的时变、非线性系统,但只要把先进的控制策略运用于SRD传动系统中,系统的性能将大幅度提高。理论与实践证明:SRD系统在单位体积转矩值、效率、逆变器伏安容量及其性能参数上均有较高的技术指标,特别在转矩与转动惯量的比值上占有较大的优势,使可变范围广,可控因素多,是一种较理想的新型调速系统。
[1]王宏华.开关磁阻电机调速系统的设计[M].北京:机械工业出版社,2000.
[2]张幽影,陈宝江.开关磁阻调速电动机[M].北京:机械工业出版社,1993.
[3]王莅斌. 基于自适应模糊算法的无刷直流电机控制器设计与开发[D].中国优秀硕士学位论文全文数据库,2008.
