大型船舶电力系统的静态电压稳定分析
2010-07-25张琦兵邰能灵王鹏倪明杰卫卫傅晓红
张琦兵 邰能灵 王鹏 倪明杰 卫卫 傅晓红
(1. 上海交通大学电子信息与电气工程系,上海 200240; 2. 中国船舶工业集团公司第七0八研究所,上海 200011 )
1 引言
电力系统除了同步运行的稳定性外,还包括负荷节点的电压稳定性[1,2]。电压失稳表现为输电系统电压剧烈下降,以致于电网解裂。随着电力系统的发展,特别是北美以及欧洲两大电网相继出现大事故后,电压稳定问题变得尤为突出,成为大电网的主要危害之一,并且限制着传输线的功率极限[3]。
近年来,船舶电力系统发展迅速,电压等级更高,系统容量也越来越大,电压失稳后对电网造成的破坏以及经济损失不容忽视。所以有必要对船舶电力系统的电压稳定性进行分析,但目前相关研究较少。文献[4]中作者对船舶电力系统的稳定性作了简要介绍。文献[5]对船舶电力系统中电压稳定的定义及分类作了总结,在此基础上提出了适合于船舶电压稳定分析的负荷模型及电压稳定指标,为船舶电力系统稳定性研究作铺垫。文献[6]侧重于船舶电力系统中的直流配电系统,针对交流系统与直流系统不同的联接结构形式,对船舶电力系统的静态电压稳定性进行了分析研究。
本文在简要介绍电力系统电压稳定的基础上,提出了两个分别表征有功及无功的静态电压稳定指标,根据两个指标的大小关系可以判断引起电网静态电压失稳的主要因素。并建立了符合实际的船舶电力系统模型,利用ETAP软件对各个船舶电力系统运行工况进行潮流计算,在此基础上分别计算了本文提出的静态稳定指标,对船舶电力系统各工况下的电压稳定性作了分析。
2 船舶电力系统电压稳定[3]

图1 简化的船舶电力系统等效图
以图1所示的简化船舶电力系统介绍电压稳定性,电源通过线路向负荷区供电,则传输的功率为:
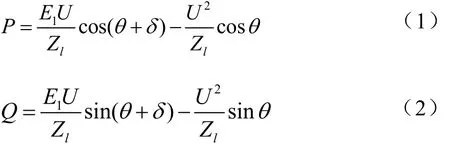
从式(1)与式(2)中削去δ可得:

由式(3)可以解得:




图2 电压、有功与无功的关系
图2表明,当电源电压、传输线路参数及负荷给定时,负荷端电压有两个运行状态(式(4)有两个解)。对于电压较大的运行状态U'(对应黑色曲面以上的状态),当负荷减小时,负荷端电压升高,此运行状态是稳定的;而对于电压较小的运行状态U″(对应黑色曲面下面的状态),当负荷减小时,负荷端电压降低,此运行状态是不稳定的。在功率达到极限值时,U'=U″,此时为临界稳定状态,因此稳定的判据为:

如图2中的黑色曲面,即为电压稳定的临界状态。
3 船舶静态电压稳定指数
电力系统静态电压稳定的分析,主要是确定电压稳定临界点,只有已知电压稳定临界点,才能得到系统的稳定裕度,进而准确判断系统运行状况,并能适时采取合理的控制措施。
由第1节的分析可知,节点电压静态稳定的判据为式(5),对(1)及(2)进行式(5)的计算得:

令:


则,可定义节点电压静态稳定指数:

当SVSI<0时,节点电压是静态稳定的,而当SVSI≥0时,节点电压是静态不稳定的。SVSI的绝对值可以衡量静态稳定裕度,绝对值越大,静态稳定性越好。图3与图4是对应于表1中的参数,考虑负荷功率变化时,利用式(4),式(8)及式(9)计算的电压、SVSIp和SVSIQ曲线。其中图3与图4对应不同的功率因数。如图所示,SVSIp和SVSIQ能很好地衡量节点电压稳定的情况。图3中当负荷功率因数较高时,SVSIp较SVSIQ大,而且,SVSIp最先穿越零点。所以,功率因数较高时,有功对电压稳定的影响更大,节点电压临界稳定点由,SVSIp决定。图4中,功率因数较低,需要的无功增多,当负荷增加到一定程度时,SVSIQ大于SVSIp并先穿越零点。此时,无功对电压稳定的影响更大,节点的电压临界稳定点由SVSIQ决定。比较图 3与图4可知,功率因数较低的负荷需要更多的无功,更容易发生电压静态失稳。
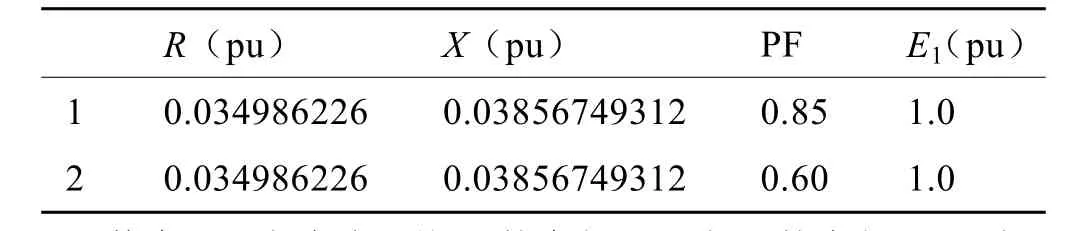
表1 算例参数

图3 P-U,P-SVSI曲线(PF=0.85)

图4 P-U,P-SVSI曲线(PF=0.6)
另外,由图可知,无论是SVSIp还是SVSIQ先穿越零点,此时电压并未到达真正的电压临界稳定点,可见式(8)、式(9)及式(10)计算的稳定指数趋于保守。但实际由于其误差很小,是可以忽略的。采用SVSIp与SVSIQ两个参数的好处在于,能分别对有功及无功对电压稳定的影响进行评估,从而更有利于负荷或发电机的调整。对于连接多条支路的母线节点,可以分别计算每条支路的SVSI,然后取最大值。
4 典型船舶电力系统
4.1 典型船舶电力系统模型的建立
本文利用ETAP仿真软件建立船舶电力系统仿真模型,ETAP是美国欧特艾公司用于发电、输电、配电和工业电力系统的设计、仿真和运行的综合分析软件。如图 5为根据某条 LNG船建立的船舶电力系统仿真模型。全船共有四台发电机,容量分别为:11 MW、11 MW、11 MW及5.5 MW。系统仿真中,只计及船舶中压 6.6 kV系统,对于0.45 kV及以下负荷网络,由于对船舶电力系统稳定性分析影响较小,在此采用集中等效负荷的方法。船舶电力系统中,主要为电动机负荷,各电动机的容量具体如图5所示。
4.2 运行工况
船舶电力系统随船舶的不同任务而具有不同的运行工况。不同的工况下,负荷以及运行的同步发电机各不一样,明确各工况下运行的发电机及负荷对船舶电力系统的稳定性分析具有重要作用。船舶电力系统一般随船舶运行的不同分为以下几种工况:
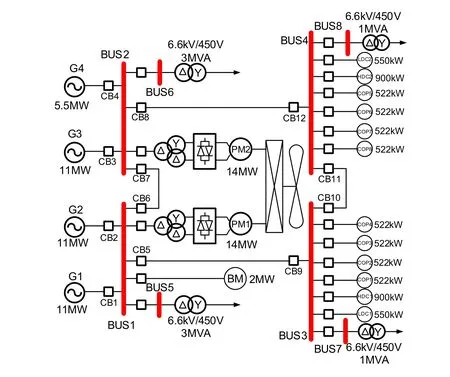
图5 船舶电力系统仿真模型
a) 岸电工况:即由岸边陆地上的电力系统对船舶进行供电,此时,船舶四台同步发电机全部停运,而只有部分生活负荷;
b) 停泊工况:电力推进系统及装卸货电机全部处于不工作状态,运行负荷较少,由 G4一台发电机供电维持部分船舶上的生活用电;
c) 装卸货工况:是指船舶处于装卸货的工作状态时船舶电力系统的运行情况,此时,推进部分停运,而全部的装卸货电机满负载运行,由G1与 G4两台发电机组进行供电,同时有少量的生活用电。
d) 正常航行工况:是指船舶处于一般航行状态,船舶电力推进部分带70%负载运行。由于电力推进占全船主要负荷,此时运行的同步发电机有G1、G2及G3。装卸货电机不工作,但是有船员正常的生活用电。
e) 全速航行工况:是指船舶推进负荷部分带载90%以上,为了保持供电,G1、G2、G3及G4全部运行供电。无装卸用电,少量生活用电。
上述各种工况中,岸电工况因由陆地电力系统供电,一般不存在稳定性问题,所以本文主要分析停泊工况、装卸货工况、正常航行工况及全速航行工况。
5 船舶电力系统静态电压稳定分析
对于图5所示的船舶电力系统,主要有8条母线节点,在不同工况下进行潮流计算,利用潮流计算的数据,可以计算出各种工况下船舶电力系统母线节点的静态电压的稳定情况及稳定裕度。
表2至表4为不同工况下SVSI的计算结果,如表中数据所示,各种工况下船舶电力系统电压总是静态稳定的,而且有很大的稳定裕度,主要是因为船舶电网覆盖面积较小,电网中电缆长度较短。另外,对比各表中SVSIp与SVSIQ可知,船舶电力系统在各种工况下,皆有SVSIQ<SVSIp,SVSI由SVSIQ决定。说明船舶电网的电压不稳定现象主要由无功不足引起,这是因为船舶电网中存在大量电动机。例如除推进系统所用同步电动机外,还有大量异步电动机负荷,而无论同步电机还是异步电机,它们在正常运行时对无功的需求均很大。
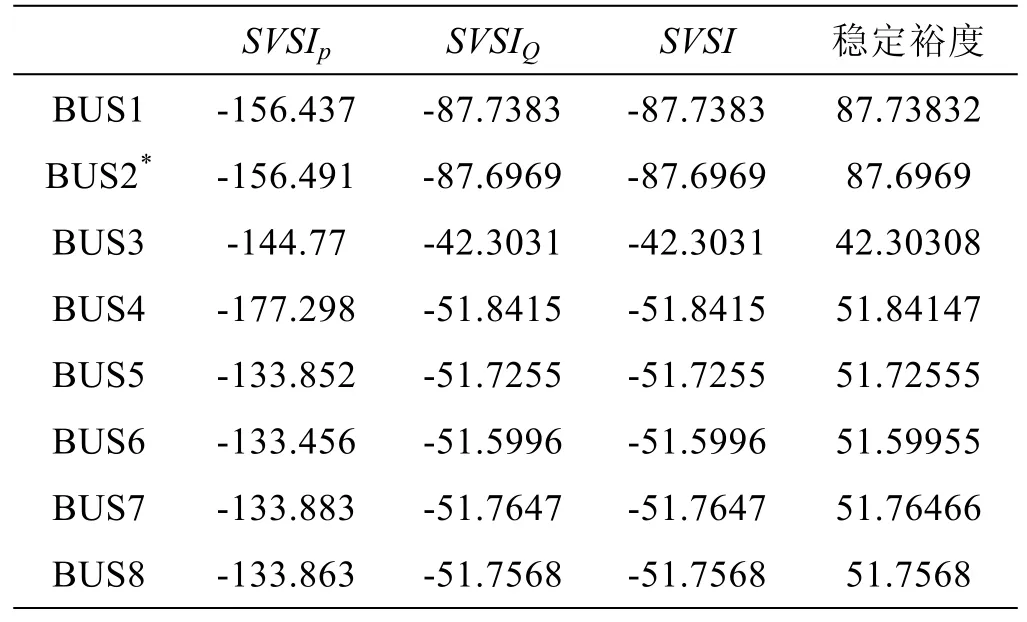
表2 装卸货工况

表3 正常航行工况
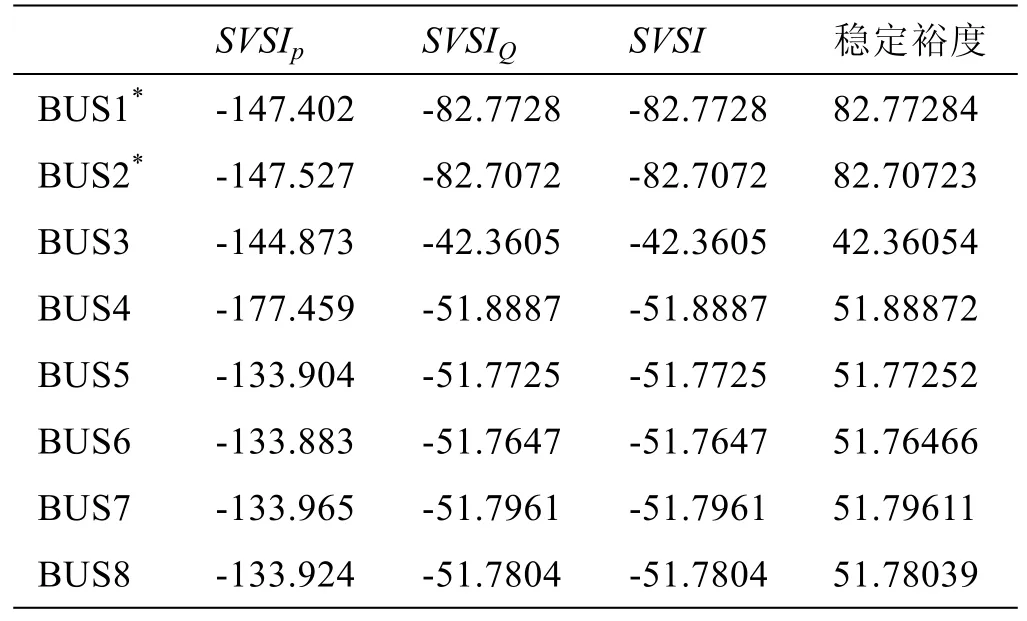
表4 全速航行工况
6 结束语
船舶电力系统容量的迅速扩大需要对系统的电压稳定性进行分析,本文提出了两个船舶电力系统电压稳定新指标,能分别对有功及无功引起的电压失稳进行衡量。在此基础上,建立了符合实际的船舶电力仿真系统,利用本文提出的电压稳定性指标对不同工况下船舶电力系统的静态电压稳定性进行了分析。分析结果表明,由于船舶电力系统供电较集中,电压静态稳定性较好。由于船舶电力系统中冲击负荷较多,应该重点考虑大容量冲击负荷对船舶电网暂态电压稳定性的影响。
[1] Kundur P., Paserba J., Ajjarapu V., Andersson G., Bose A., Canizares C., Hatziargyriou N., Hill D., Stankovic A., Taylor C., Van Cursem T., Vittal V. Definition and Classification of Power System Stability[J]. IEEE Transactions on Power Systems, 2004 (3): 1387-1401.
[2] Yorino N., Masuda Y., Sasaki H., Nishikame K.,Tamura Y., Kitagawa M., Ohshimo A. Classification and Analysis of Voltage Stabilities in Power Systems[J]. Electrical Engineering in Japan, 1991 (5):60-71.
[3] Van Cutsem T. Voltage Instability: Phenomena,Countermeasures, and Analysis methods[J].Proceedings of the IEEE, 2000 (2): 208-227.
[4] Bromhead J. R. Offshore Electrical Systems[J]. IEEE Proceedings C: Generation Transmission and Distribution, 1986 (7): 457-461.
[5] Zhaomin, Fanyinhai. The Voltage Stability Research of Ship Electric Power System[C]. IPEMC 2006:CES/IEEE 5th International Power Electronics and Motion Control Conference, August 14, 2006 - August 16, 2006, 2007: 1968-1972.
[6] Rudraraju S. R., Srivastava A. K., Srivastava S. C.,Schulz N. N. Small Signal Stability Analysis of a Shipboard MVDC Power System[C]. IEEE Electric Ship Technologies Symposium, ESTS 2009, April 20,2009 - April 22, 2009, 2009: 135-141.
[7] ETAP产品介绍.http://www.otichina.com/products.htm[OL]