欠驱动假手手指抓取力的研究
2010-07-18王新庆
黄 海,王新庆,姜 力,刘 宏
(1.哈尔滨工程大学智能水下机器人国防技术重点实验室,哈尔滨 150001,haius@163.com;2.哈尔滨工业大学机器人技术与系统国家重点实验室,哈尔滨150001;3.德国宇航中心机器人与系统动力学研究所)
欠驱动假手手指抓取力的研究
黄 海1,王新庆2,姜 力2,刘 宏3
(1.哈尔滨工程大学智能水下机器人国防技术重点实验室,哈尔滨 150001,haius@163.com;2.哈尔滨工业大学机器人技术与系统国家重点实验室,哈尔滨150001;3.德国宇航中心机器人与系统动力学研究所)
为了满足欠驱动手进行复杂作业的需要,基于欠驱动原理建立了手指对物体的抓取力模型和基于力的阻抗控制策略.对应于任一手指姿态,抓取力模型可以准确得到基关节抓握力矩和手指各指节抓取力的关系;采用基于力的阻抗控制策略,实现了基关节抓取力控制.实验证明,手指能够稳定地抓取鸡蛋这样比较滑、容易碎、形状复杂且有一定质量,需要稳定和平衡抓取力的物体,其成功率达80%以上.而这是单纯用手指的基关节力控制很难做到的(成功率只有不到20%).手指抓取力模型和阻抗控制策略的建立大大增强了假手进行复杂作业,抓取复杂物体的能力.
假手;欠驱动;阻抗控制
欠驱动在机械手中有很多引人注意的特点,比如其结构简单,需要的电机数少于自由度数,该方法可以通过像弹簧和机械限位之类的被动元件来实现手指的自适应抓握.国内外许多研究机构在这方面做出了卓有成效的研究.如加拿大手、Southa-mpton手、TBM 手、OTTOBOCK手、意大利手等[1-5].这类手可以完成一些简单的操作,并且被应用于残疾人假手和伺服机器人[6-7].欠驱动机构是指在机构中独立控制变量(驱动单元)少于系统的自由度数(关节数).为了获得静定系统,在欠驱动机构中需引入弹性元件和限位装置[8].然而,欠驱动机构中弹性元件又给欠驱动手的精确控制,诸如精确的轨迹跟踪,力控制等造成了一定的困难[9],尤其是国内的一些欠驱动手中,加上其传感器数量的限制,难以实现复杂和准确的操作,限制了它的灵巧[10].
本文进行手指的静力学模型分析,研究手指基关节的力控制,并进行手指抓取的研究和实验.
1 手指的抓取力模型
HIT-DLR仿人假手的手指结构如图1所示.它共有3个指节,其中近指节和中指节欠驱动,手指的中关节有扭簧,中指节和指尖通过耦合连杆实现近似为1∶1的耦合运动,手指的基关节有力矩和位置传感器.由于手指只有一个主动自由度,给定一种抓取姿态,手指的基关节抓取力和各指节抓握力是一一对应的.从而可以把手指结构简化为图2所示的抓取力学模型.

图1 手指结构图

图2 手指抓取的力学模型
由图 2,根据虚功原理可得

式中:T为手指系统输入转矩向量,由手指基关节驱动力矩T0和弹簧扭矩T1组成;ω为手指各关节与力矩相关的连杆的角速度向量,由驱动连杆角速度˙α1和第二、第三关节角速度˙θ2、˙θ3构成;F为作用在手指上的外力构成的向量,由外力F1,F2和F3构成;V为外力作用点的速度分量,分别由各接触点的法向方向的速度矢量构成.

如图3所示,设杆a1和l1之间的初始角为θ0,a1杆和y0之间初始角为α0,l1和c1之间初始角为β0,令 α0=0;运动时,设近指节转 θ1,中关节转θ2,a1杆转α1,这时四连杆机构之间的各个夹角分别为:a1和l1之间为θ0+ θ1- α1,l1和c1之间的夹角为 β0+ θ2.

图3 基关节四杆机构简图
从而可以得
由于中指节和指尖为1∶1的耦合运动,˙θ2=˙θ3,且中指节和指尖的质量比为7∶ 3,由能量关系,有
当d1≠ 0,d1d2d3≠0时,Jv为非奇异矩阵,因此它的逆矩阵存在,而Jω恒为非奇异矩阵,逆矩阵也是存在的,所以

如果忽略扭簧产生的扭矩,可得手指对物体的抓取力模型:

2 基于力的手指阻抗控制
式(6)是关于手指基关节驱动力矩的逆动力学方程:



其中:Text是测得的力矩传感器值减去重力.如图4引进PI控制器,这样,如果Te趋于 0,则实际的阻抗参数趋近于期望的阻抗参数.当手指达到平衡状态后,所有测量和期望得到的速度和加速度式中:M(θ)为手指的惯量矩阵,V(θ,)为手指的向心加速度和哥式加速度向量,F(θ,sign))为手指运动过程中扭簧的阻力、阻尼和摩擦,θ为手指各连杆运动角度向量,TL为手指所受外力力矩.
当手指以极慢速度运动时,手指所受动力学力趋于 0,即:M(θ≈ 0,V(θ)≈ 0,这样如果手指在整个运动过程中被补偿,平衡状态下的手指所受外力矩可由下式求出:

其中F(θ)是手指所受扭簧的阻力.
由于假手手指只有一个自由度,手指各连杆的运动角度可以由基关节的角度通过几何关系求得,基关节的角度由位置传感器得到,力矩参考值由参考位置和实际位置计算得到.
假手手指的基关节作用力和位置之间的动力学关系一般用如下的二阶微分方程来描述:

式中:Md为阻抗控制系统的目标惯量(N·m·s2/(°)),Md>0;Bd为阻抗控制系统的目标阻尼(N·m·s/(°)),Bd>0;Kd为阻抗控制系统的目标刚度(N·m/(°)),Kd>0;TL为手指与环境之间的接触力在基关节处产生的力矩(N·m);θbr为手指基关节的参考角度(°);θ为手指基关节的实际角度(°).
为保持目标阻抗,手指的基关节力矩可由式(6)和(7)求得:都为 0,这样平衡状态下的变形角δθ乘以刚度就得到了平衡状态下的力矩,手指就像是一个编好程的弹簧.
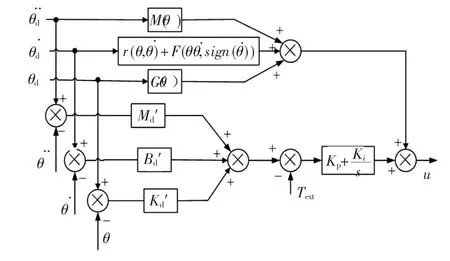
图4 基于力的基关节阻抗控制策略
3 手指抓取的实验与分析
参照文献[11-12]的方法,进行了抓取鸡蛋的实验.根据鸡蛋的特点得到抓取鸡蛋的力封闭模型如图 5,由于鸡蛋较大,各指节力和摩擦力共同构成力封闭.设定各指节抓取力大致如表 1,这样根据手指对物体的抓取力模型式(5)计算,得到基关节控制力矩为0.33 N·m.

图5 抓取鸡蛋力封闭模型

表1 抓取鸡蛋时手指各指节抓取力及相关参数
图6是手指抓取鸡蛋的实验结果.在实验中手指未接触到物体时,基关节将首先通过图4所描述的PI控制以45(°)/s的速度抓握鸡蛋,当手指各指节接触到鸡蛋时,期望轨迹仍以45(°)/s增加到100°,此时的基关节期望力矩是0.33 N·m,如图6所示手指通过图4基于力的阻抗控制策略,可以实现准确的基关节力控制,从而保证手指各指节的抓取力按照表1分布,使手指可以稳定地抓取鸡蛋,其成功率达80%以上.而这是单纯用手指的基关节力控制很难做到的(成功率只有不到20%).所以,虽然假手只有基关节力矩传感器,也可以在手指抓取力控制中,通过手指对物体的抓取力模型,控制各指节的抓取力,从而稳定地抓取像鸡蛋这样比较难抓取的物体.

图6 抓取鸡蛋的实验结果
4 结论
1)针对欠驱动手指的特点,建立了手指对物体的抓取力模型,对应于任一手指抓取姿态,可以准确得到基关节抓握力矩和手指各指节抓取力的对应关系.
2)基于手指动力学模型,对手指的阻抗控制进行了研究,建立了基于力的阻抗控制策略,通过该策略,手指对基关节抓取力的控制就像一个编好程的弹簧.
3)抓取鸡蛋的实验表明,手指能够稳定地抓取鸡蛋这样比较滑、容易碎、形状复杂且有一定质量,需要稳定和平衡抓取力的物体,从而验证了手指对物体的抓取力模型和基于力的阻抗控制策略,大大增强了假手抓取复杂物体的能力.
[1]DARIO P,LASCHI C,CARROZZA M C.An Integrat-ed Approach for the Design and Development of a grasping and manipulation System in humanoid Robotics[C]//Proceedings of the 2002 IEEE International Conference on Robotics& Automation.Washington,D.C,USA:[s.n.],2002:556.
[2]CHAPPELL P H,KYBERD P J.Prehensile control of a hand prosthesis by a microcontroller[J].Biomedical Engineering, 1991,13:363 -369.
[3]DECHEV N,CLEGHORN W L,NAUMANN S.Multiple finger,passive adaptive grasp prosthetic hand[J].Mechanism and Machine Theory, 2001,36:1157-1173.
[4]LIGHT C M,CHAPPELL P H.Development of a lightweight and adaptable multiple-axis hand prosthesis[J].Medical Engineering and Physics, 2000,22:679-684.
[5]CARROZZA M C,MASSA B,MICERA S,et al.A“Wearable”Artificial Hand for Prosthetics and Humanoid Robotics Applications[C]//Proceedings of the 2001 IEEE—RAS International Conference on Humanoid Robots.Tokyo,Japan:[s.n.],2001:2134.
[6]FARRELL T R,WEIR R F.The optimal controller delay for myoelectric prostheses[J].IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2007,15(1):111-118.
[7]SHENOY P,MILLER K J,CRAWFORD B,et al.Online electromyographic control of a robotic prosthesis[J].IEEE Transactions on Biomedical Engineering, 2008,55(3):1128-1135.
[8]BIRGLEN L,GOSSELIN C M.On the Force Capability of Underactuated Fingers[C]//Proceedings of the 2003 IEEE ICRA.Taipei,Taiwan:[s.n.],2003:139 -144.
[9]COTTON D PJ,CRANNY A,CHAPPELL P M,et al.Control strategies for a multiple degree of freedom prosthetic hand[J].Measurement and Control, 2007,40(1):24-27.
[10]ZHAO Da-wei,JIANG Li,JIN Ming-he,et al.Control system of anthropomorphic robotic hand with keeping torque function[J].Electric Machines and Control, 2007,11(5):497-501.
[11]HUANG H,JIANG L,ZHAO D W,et al.The Development on a New Biomechatronic Prosthetic Hand Based on Under-actuated Mechanism[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems.BeiJing,China:[s.n.],2006:3791-3796.
[12]ZHAO D W,JIANG L,HUANG H,et al.Development of a Multi-DOF Anthropomorphic Prosthetic Hand[C]//2006 IEEE International Conference on ROBIO.Kunming,China:[s.n.],2006:878-883.
Finger grasp force of underactuated prosthetic hand
HUANG Hai1,WANG Xin-qing2,JIANG Li2,LIU Hong3
(1.National Defense Key Laboratory of Underwater Vehicles Technology,Harbin Engineering University,Harbin 150001,China,haius@163.com;2.State Key Laboratory of Robot and Systems,Harbin Institute of Technology,Harbin 150001,China;3.Institute of Robotics and System Dynamics,German Aerospace Center.)
In order to improve the operation capacity of an underactuated prosthetic hand,the static grasp model and the force based impedance control strategy of the finger were constructed based on the underactuated mechanism.According to the static grasp model,the precise relationship between the actuation torque and the support force from phalanges can be obtained corresponding to any grasp attitude.The force based impedance control strategy realizes the force control of base joint.According to experiments,the finger can stably grasp a slippery,fragile,complicated and comparatively heavy object such as an egg.Its success ratio reaches 80%,which can not be achieved only through the force control of base joint(the success rate was only less than 20%).Therefore,the hand can realize complex operation with the construted static grasp model and the force based impedance control strategy.
prosthetic hand;underactuated;impedance control
TP 242.6
A
0367-6234(2010)05-0801-05
2008-09-06.
国家自然科学基金重点资助项目(50435040).
黄 海(1978—),男,博士后;
姜 力(1971—),男,副研究员,博士生导师;
刘 宏(1966-),男,特聘教授,博士生导师.
(编辑 杨 波)
