基于80C196KC开关磁阻发电机控制系统的设计
2010-07-09李华柏
李华柏,黄 杰
(湖南铁道职业技术学院轨道交通系,株洲412008)
0 引言
开关磁阻电机是典型的机电一体化系统,它继承了磁阻电机结构简单、坚固耐用的优点,又在高度发展的电力电子和微机控制技术的支持下获得了良好的可控性,因此,它在驱动调速领域已得到了广泛的应用[2].发电运行与电动运行作为开关磁阻电机的两种不同的运行状态有着对称性,研究表明,开关磁阻电机发电运行时也具有许多独特的特性与优点,目前在发电领域已受到了越来越多的重视.本文在分析三相 6/4结构开关磁阻发电机(Switched Reluctance Generator,以下简称SRG)工作原理的基础上,设计了一套基于MCS80C196KC单片机的数模混合控制系统.
1 SRG结构及工作原理
SRG主要由磁阻电机、功率变换器、控制器及检测电路四个主要部分构成.双凸极磁阻电机是整个SRG系统机电能量转换的部件,它的定子与转子都是凸极结构;功率变换器(图中仅画出功率变换器的一相)是连接电源和 电动机绕组的开关部件,通过它可以将电源能量馈入电机,对绕组进行励磁,也可将电机内的磁场储能反馈回电源,实现发电运行.控制器是整个系统的核心部分,通过控制功率换器中主开关器件的工作状态,实现对发电机运行状态的控制.开关磁阻发电机的电磁转矩为:

式中:i为相电流,L是相电感,θ是转子位置角.
根据式(3),电磁转矩的方向是由相电流所对应的相电感的变化率决定的.若相电流处于d L/dθ>0区间时则产生正转矩,电机工作在电动状态;若相电流处于d L/dθ<0的区间时则产生负转矩,电机工作在制动或发电状态[1].只要根据转子位置来控制主开关通断角度,使相电流主要集中在d L/dθ<0的区间,就可以使SR电机在运行时将机械能转换为电能向外输出.
图1 是发电运行时相电流波形与相电感的对应关系,如图所示,在 θ=θ1时刻主开关开始导通,在θ=θ2时刻主开关关断,θ1~θ2阶段为励磁阶段,SRG吸收电能;θ>θ2阶段为发电阶段,D1与导通续流,电机向外输出电能.很显然,SRG一相的发电输出功率为发电功率和励磁功率之差.
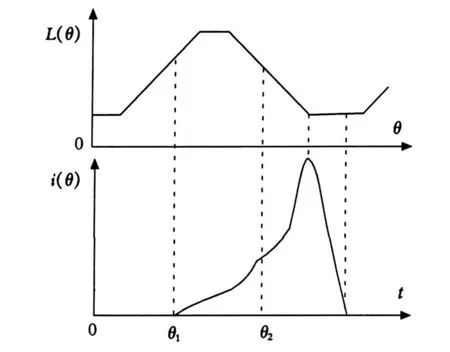
图1 相电流与相电感的对应关系
2 发电运行时的控制策略
发电运行的控制目标是高效率地产生输出电流以维持额定的输出电压.发动机转速是变化的,负载也可能发生变化,控制方案应该使系统在速度和负载的一定变化范围内,维持输出电压的稳定,保持系统有良好的稳态特性和动态特性.因此控制模式的选择对于系统输出电压的稳定是至关重要的.
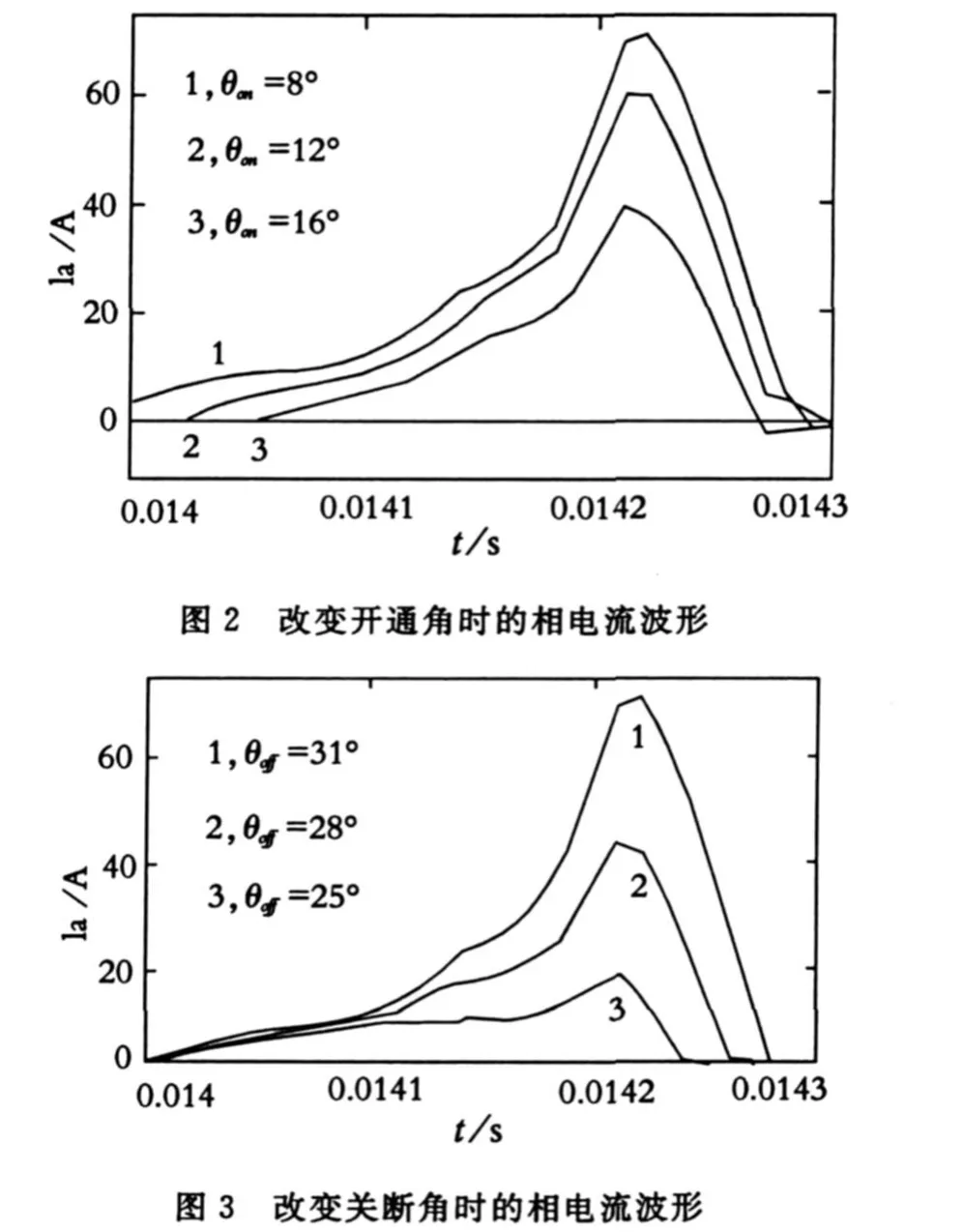
角度位置控制模式是通过调节开通角θon,关断角θof f来调节励磁电流最终实现对输出电压的控制,进而控制输出功率[3].图2与图3分别是角度位置控制方式下改变θon与改变θoff时的相电流仿真波形,由图可知,固定 θof f,提前 θon,或者固定 θon,增大θof f,都可以使绕组励磁的时间增加,相电流的峰值增加,电流波形变宽.
SRG发电运行时,当原动机的转速发生较大的变化,SRG发电运行时,当原动机的转速发生较大的变化,如转速增加,如果开通角与关断角固定,那么建立电流 的时间相对将缩短,导致励磁电流减小,影响SRG的发电能力.所以当SRG处于高速发电运行时,要保证输出 功率的稳定,适时地调整开通角与关断角的大小是有效的控制方法之一,如将开通角提前,将关断角推后,都能增大励磁电流,提高SRG的发电输出功率.
为了输出平稳的直流电,输出端还需并联电容进行滤波.滤波电容是一个比较大的滞后环节,会影响电压外环的响应速度.为改善本系统发电运行时输出电压的动态特性,采用电压外环、电流内环双闭环控制,当外界负载突变或者受到外来干扰时,即使电压外环尚未迅速响应,电流内环也可以起到迅速调节的作用,保证输出电压的稳定,从而改善系统的动态特性.
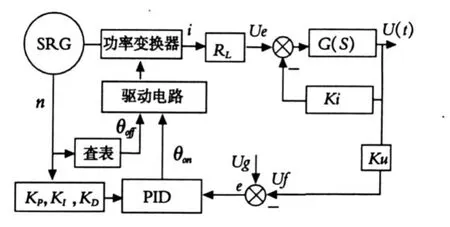
图4 角度控制方式实现框图
3 基于80C196KC数模混合控制器的设计
SRG发电运行时,一般运行于较高的转速,因为低速不利于发电功率的输出,而高速运行对控制的实时性有较高的要求.系统采用双闭环控制时,单片机一方面要完成电流内环与电压外环的数据处理,另一方面还要完成对相电流的采样、信号比较等工作,导致CPU的负担较重,控制系统的实时性会受到影响,故SRG不宜采用全数字控制[2].本文采用了一种以MCS80C196KC单片机为核心的数模混合控制方法,图5是控制系统的结构图.
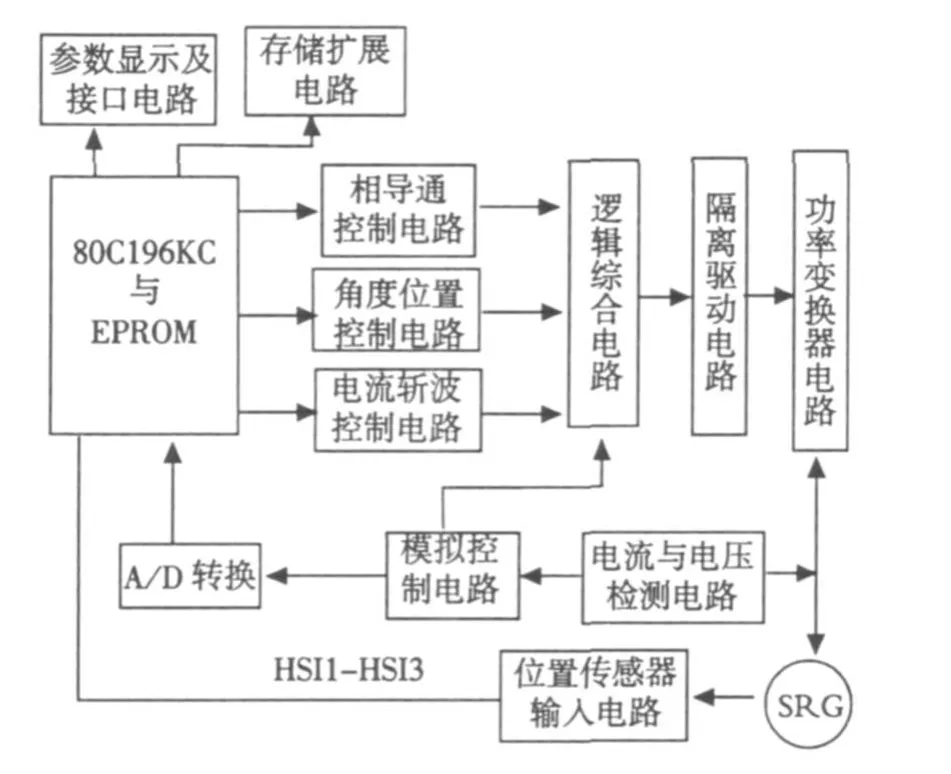
图5 SRG控制系统结构图
数字控制电路部分包196CPU、存储扩展电路、位置检测电路、参数显示及接口电路.196CPU是控制电路的核心,负责状态检测、角度控制、参数优化、转速计算等工作,根据系统的转速查表给定关断角θoff的值,根据优化的开关角,给出主开关管的开通、关断信号等;存储器负责存储数据和程序;位置传感器输入电路将位置信号送入单片机的HIS口,HSI口监测位置变化并设置位置信号的上跳沿触发HSI中断[2].HSI中断程序完成电机实时转速的计算,并将处理后的位置信息送给196CPU,然后通过HSO接口输出信号分别控制A、B、C三相.
系统相电流与电压的检测、开通角的PID调节及故障保护等功能由模拟电路实现,模拟电路完成信号采集后,将结果送入单片机进行综合处理,大大简化了CPU数据处理时间,提高了系统的实时性.
4 仿真分析
4.1 负载突变时SRG的动态特性
当负载突变时,SRG必须及时响应负载的变化,保持电压稳定以满足负载要求.下面通过负载突变时输出电压的仿真波形来验证SRG电压开环与闭环调节时的动态特性,时间t从0到0.04 s,负载为8 k W,在0.04 s负载突加为 9.2 kW,在 0.08 s负载突减为4 k W.
图6 是负载突加、电压开环调节时的输出的电压仿真波形,图7是系统采用闭环调节时的仿真波形.
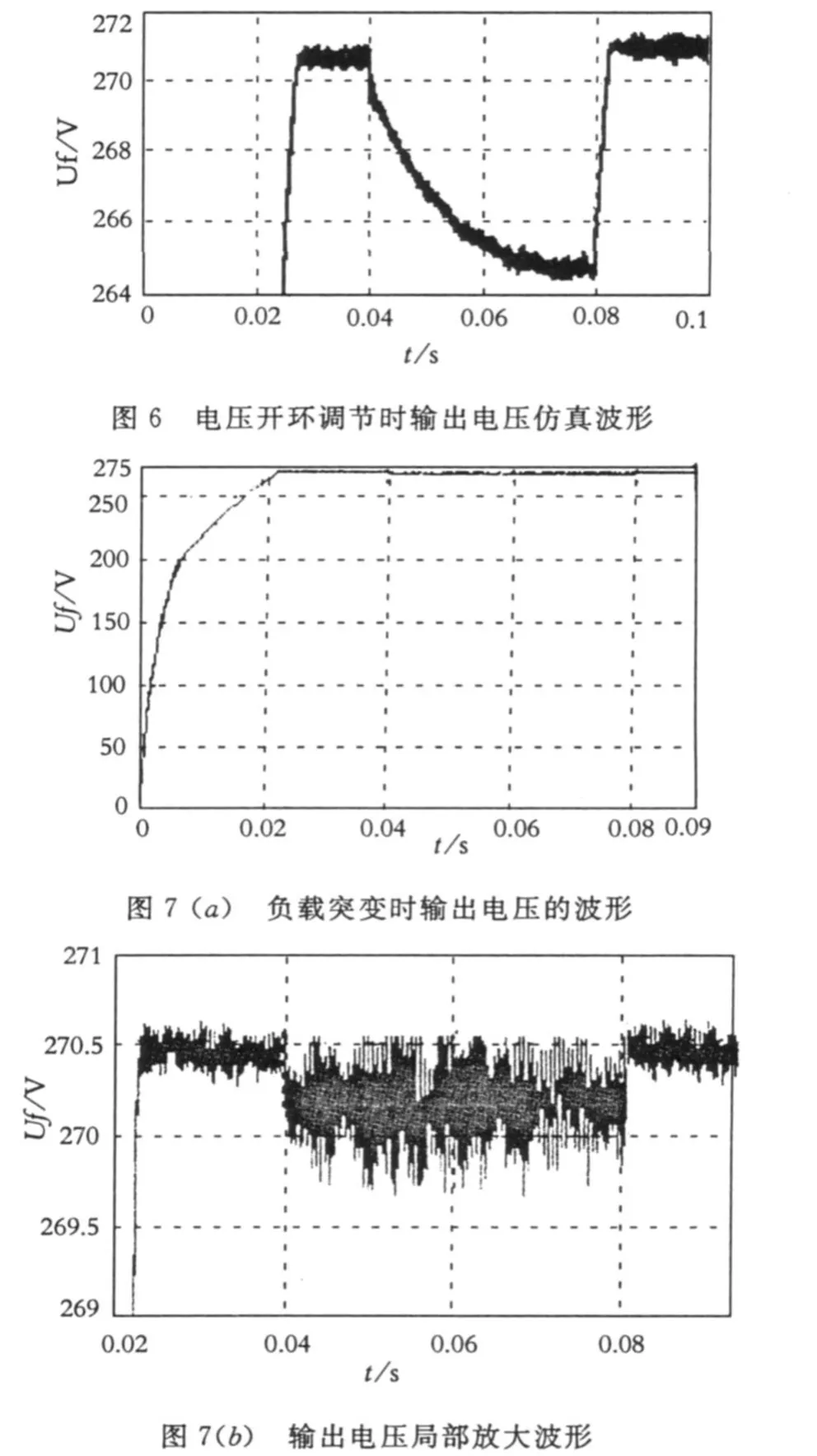
仿真结果表明,电压闭环调节时,当负载突变,SRG的输出电压基本保持稳定,电压纹波与幅度很小,总体对负载突变的瞬时性较好,过渡时间很短.这主要是因为控制系统通过电压闭环来调节开关角,从而调节励磁电流来满足负载突变的功率要求,所以对负载的变化响应较为迅速.而开环调节时,由于负载突然加大,使得电容的放电量增加,而对电容的充电量不变,使得充电量小于放电量,输出电压逐步下降,在252 V左右重新建立新的平衡.
4.2 缺相运行时SRG的动态特性
SRG的故障包括电机故障和功率变换器故障,当这些故障发生时,控制器检测到该故障并封锁故障相的触发脉冲,使SRG运行在缺相状态.假设A相在0.024 s的时候发生开路故障,系统检测到这一故障后,封锁A相绕组的驱动信号,系统处于两相运行状态.在闭环方式下,图8反映了缺相故障时发电电压的变化过程,图9为故障相的电流波形,图10为非故障相B相与C相的电流波形.
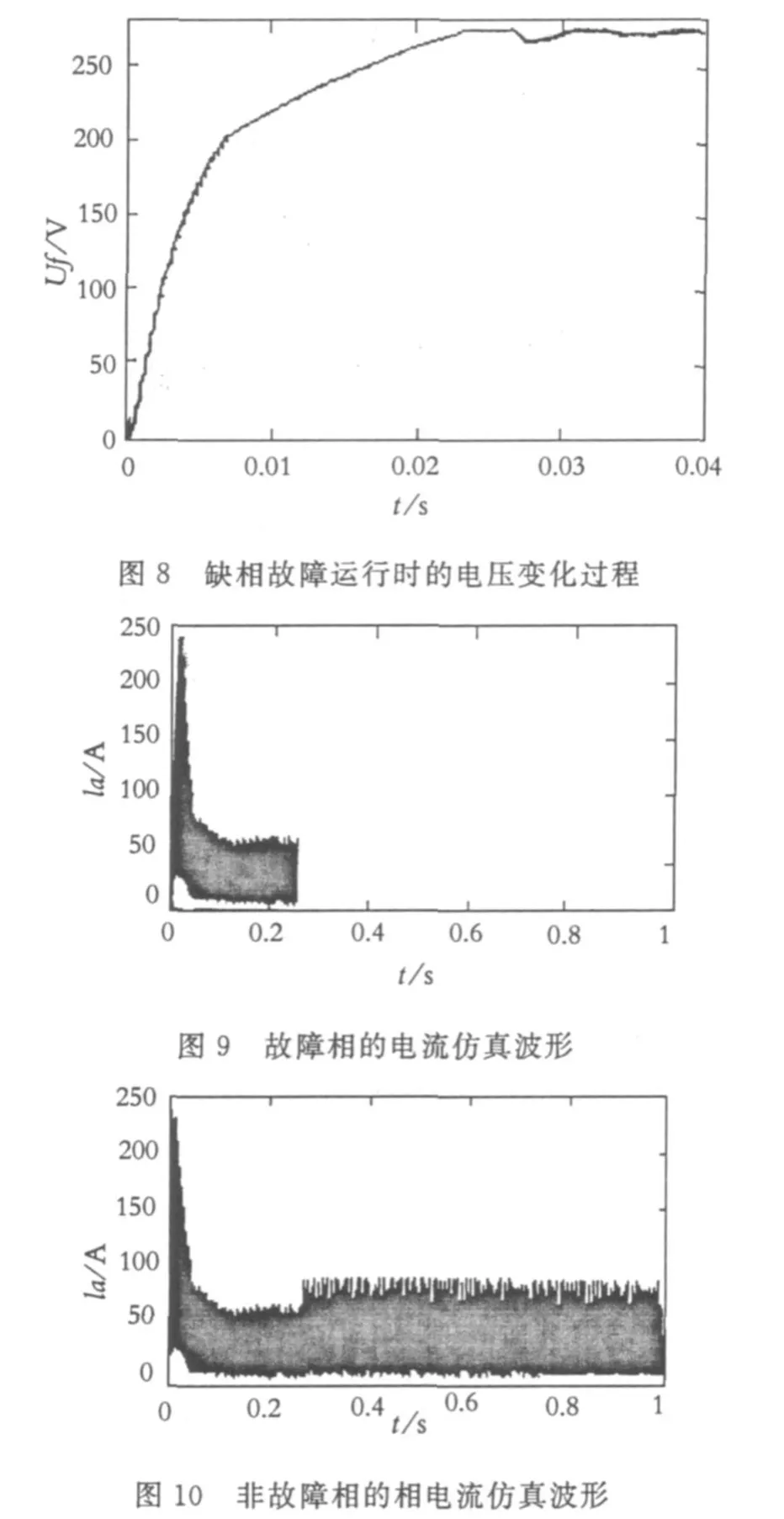
图1 1为非故障相B相与C相在正常发电运行与故障发电运行的相电流仿真波形的比较,波形1为正常工作时的相电流波形,波形2为故障后的相电流波形,可见故障发生后,非故障相B相与C相的相电流有了明显的增加.
SRG输出的平稳电压实质上是对滤波电容充放电平衡的结果,当 A和发生缺相故障时,绕组被切除,该相电流为零,其余两相继续工作,破坏了原有的充放电平衡状态.在电压闭环方式下发生缺相故障时,系统通过闭环调节非故障相的励磁电流,发电电流增大,对滤波电容的充电量也增大,最终故障相的充电量由其余两相补偿,输出电压仍然保持原给定值.电压闭环控制时发电运行的不间断供电可靠性很高,从容错的角度来说,SRG明显优于其它类型的发电机.

图11 非故障相正常工作与容错故障运行时的相电流波形
综上分析,采用电压与电流双闭环控制时,不管是负载突变还是容错故障运行,其实质都是当输出电压发生变化时,通过角度位置控制方式调节开通角来调节励磁电流的大小,从而实现对输出电压与输出功率的调节与控制.SRG的最终控制目标是系统有良好的稳态与动态特性,输出稳定的电压,从这点而言,本文控制系统的设计取得了较好的发展.
5 结 论
角度位置控制试能在较宽的速度范围内使SRG有良好的稳态与动态特性;采用电流内环、电压外环双闭环调节时,SRG能及时响应负载突变的变化,输出电压基本保持稳定,当电机缺相故障运行时,系统仍然具有较好的容错工作能力与动态特性;数模混合控制系统充分发挥了数字控制与模拟控制各自的长处,大大提高了系统的运行速度与控制的适时性.
[1]吴建华.开关磁阻电机设计与应用[M].北京:机械工业出版社,2002.
[2]刘 闯.开关磁阻电机起动/发电系统理论研究与工程实践[D].南京航空航天大学博士学位论文,2000:90-91.
[3]钱燕娟.7.5 k W开关磁阻起动/发电平台研发[D].南京航空航天大学硕士学位论文,2006:15-16.
[4]Stiebler M,LIU Ke,An Analysis Model of Switched Reluctance Machines[J].IEEE Transactions on Energy Conversion,1999,14(4):1100-1105.
[5]张 慧.开关磁阻发电机系统设计及控制策略的实施[D].浙江大学学位论文,2003:75-80.
[6]Martin Liptak,Valeria Hrabovcova.Equivalent Circuit of Switched Reluctance Generator.Based on Series Generator[J].Journal of Electrical Engineering,2008,59(1):23-28.
