模糊切换方式下的复合控制
2010-07-09程伟
程 伟
(湘潭大学 能源工程学院,湘潭 411105)
交流伺服系统由于结构简单、易于维护的优点得到了越来越广泛的应用,人们对交流伺服系统高性能运行的期望也越来越高.提高伺服系统的运行性能不外乎从两方面考虑:第一,选用高性能的交流伺服系统;第二,采用优良的控制策略.两者比较起来后者尤显重要.在交流伺服系统的控制中人们尝试了很多的控制方法,从早期的线性PID控制法到现代的智能控制法,均取得了较好的控制效果,但由于交流伺服系统属于非线性、强耦合、时变的复杂的系统,采用单一的控制方法,难以使系统达到预期的控制目标[1],因此由以定量计算控制策略为主的经典控制与以定性推理控制策略为主的智能控制相结合的复合控制成为研究的热点[2],复合控制的交流伺服系统也应运而生且日益得到完善.其中典型的是FZ-PID复合控制,它在大偏差时由模糊控制器来实现动态控制,而在小偏差时由开关切换到线性PID控制器以消除稳态误差,其切换方式常采用预先设定阀值,由程序自动切换[3].经研究发现这种切换方式至少存在两方面的问题:一是切换阀值难以选择恰当,不易解决系统响应的快速性与超量之间的矛盾;二是难以保证系统由一种控制方式向另一种控制方式过渡时实现无扰动切换,从而延长了系统的调节时间.
本文首先对FZ-PID复合控制的原理进行了讨论,然后针对阀值切换所存在的缺陷,设计了一种基于模糊规则切换的复合控制器.
1 FZ-PID复合控制
FZ-PID复合控制的系统结构图如图1所示.其基本原理是在大偏差范围内主要采用动态性能较好的模糊控制,它由计算机中断采样获取被控量的精确值,与给定量比较得到偏差与偏差变化率作为模糊控制器的两个输入,经模糊化、模糊推理、去模糊化最后得到控制输出量.在小偏差时主要采用PID控制以消除稳态误差.二者之间的切换采用模糊切换,实现平滑过渡.
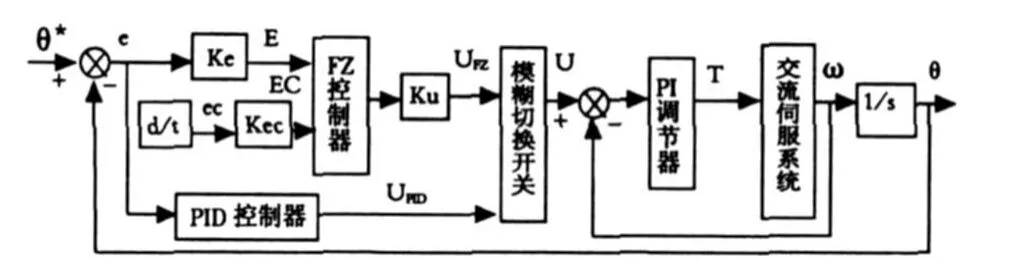
图1 FZ-PID复合控制的交流伺服系统
1.1 模糊控制器
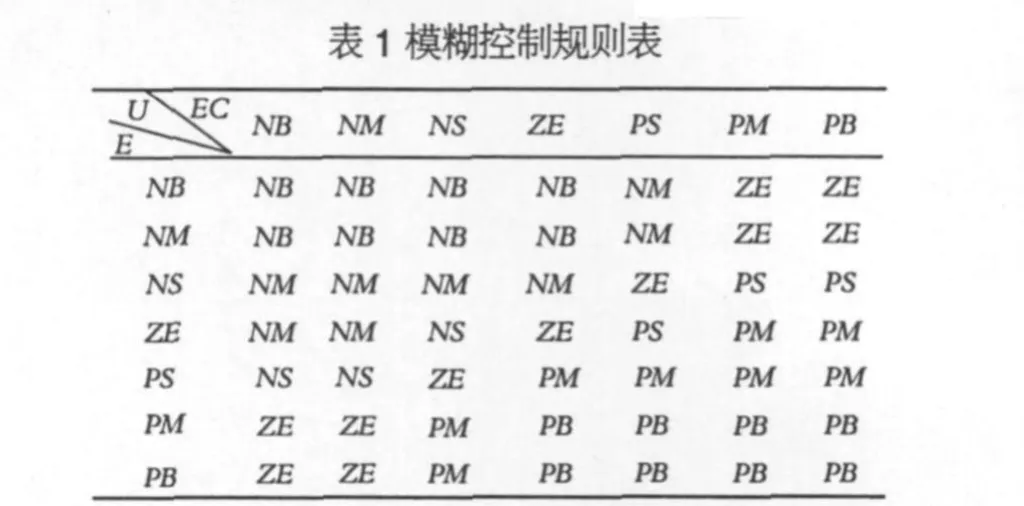
设定其输入E、EC与输出U的模糊子集均为{NB,NM,NS,ZE,PS,PM,PB},并 取 E 、EC、U的论域均为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},隶属度函数定义为均匀分布的三角形函数,采用重心法去模糊[1][4].根据系统要求可列出如表1所示的模糊控制规则.
1.2 PID控制
2 模糊切换方式设计
模糊切换的原理如图2所示,为简单起见这里采用一维模糊控制器,以e作为输入,以u作为输出,隶属度函数如图3所示,图3中的a的值要根据系统要求取定来获取不同的控制强度分量.其控制算法如下:


该切换方式的特点如下:
(1)作用于被控对象的控制量是两控制器的加权混合输出,综合了两种控制的优点.
(2)在整个控制过程中,两种控制的权重实现了自动调整.当系统处于暂态时 ΨFZ较大,由模糊起主要作用提高了系统的快速性,当系统进入稳态时ΨPID较大,由PID控制起主要作用,提高了系统的稳态精度.
(3)提高了系统的抗负载扰动的能力.当系统出现较大扰动时,ΨFZ迅速增大起抑制扰动作用.
3 实验与仿真
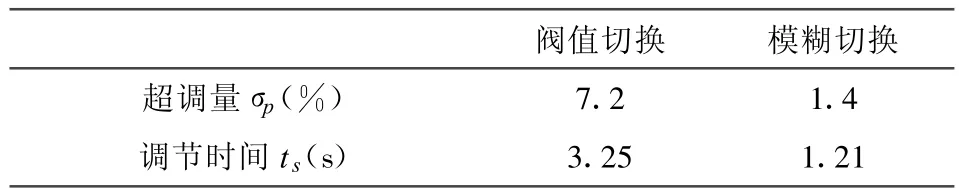
表2 性能参数比较表
通过比较说明,本文提出的基于模糊规则切换的复合控制明显优于基于阀值切换的控制方式,不但系统的超调量显著减少,而且也提高了系统的快速响应性,缩短了调节时间,并实现了两种控制的平滑过渡.
[1]诸 静,等.模糊控制原理与应用[M].北京:机械工业出版社,2001.
[2]Mamdani E H.Aplications of fuzzy Algorithms for Simple Dynamic plant IEEE Proc[J].1974,121(21):1585-1588.
[3]张 波.FUZZY-PID复合控制[J].自动化与仪器仪表,2001,(2).
[4]张国良,等.模糊控制及其MATLAB应用[M].西安交通大学出版社,2002.
