一种基于矢量控制的变流器故障诊断方法
2010-06-30孙大南韦中利刁利军
梅 樱 孙大南 韦中利 王 磊 刁利军
(北京交通大学电气工程学院 北京 100044)
1 引言
电力牵引传动系统是电力机车与电动车组的核心,它主要是由牵引变流器和牵引电机组成,对牵引电动机的控制是由牵引变流器完成。因此,牵引变流器是电力机车能量转换的关键部件,其可靠性对于电力机车的安全运行十分重要。所以对牵引变流器的故障情况进行在线诊断,从而实现对变流系统的保护及容错控制是非常必要的。
随着电力电子器件及控制技术的不断发展,使得电力牵引系统的效率越来越高,可是随之产生的系统复杂和器件增多等,都是导致变流系统可靠性降低的因素。其中保证变流器正常运行的最关键部件是电力电子器件,因而对变流器电力电子器件的故障诊断是十分必要的。
由于变流系统是一个高度的非线性及强耦合的复杂系统,因此,对变流系统的故障诊断比较复杂[1]。目前,对变流器故障从控制策略上分析选取故障特征参数的研究还很少。
本文首先由变流器空间矢量控制的原理及其数学模型,导出了牵引变流器对电动机进行控制的机理,确立了以变流器输出电流信号的故障特征参数,再运用小波分析理论对电流信号进行降噪处理,通过FFT变换及对电流信号统计计算得到故障特征向量,将该特征向量作为神经网络的输入,通过对神经网络的训练,确定网络参数,对故障数据进行分析,从而达到故障诊断的目的[2-4]。至此,提出一种基于矢量控制的以变流器输出三相电流信号为特征参数的变流器常见故障的诊断模型。
2 变流器特征参数的选取
2.1 矢量控制原理
图1解释了矢量控制实现的原理,其中电动机模型采用同步旋转坐标系下的模型。

图1 基于矢量控制的变流系统控制原理图Fig.1 Control schematic diagram of converter based on vector control
电动机解耦本质是对电动机定子电流在时间和空间上的坐标变换。三相电动机中三相电流产生的合成磁动势完全可以用两个在空间上相差90°的绕组通以时间上相差90°的对称电流产生的合成磁动势所代替。将电动机ABC三相输入电流ia、ib和ic变换到两相静止坐标系下的α-β系统中,再将两相静止α-β绕组电流变换到两相旋转的d-q坐标系下,其变换式为
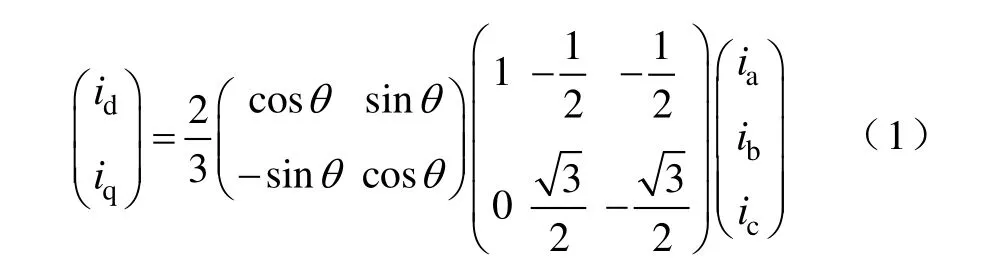
式中,θ 为α-β坐标轴与d-q坐标轴之间的夹角。
矢量控制,就是通过对 ia、ib和 ic的检测、系统给定及矢量控制算法,得到控制电动机的三相参考电流,然后使用 PWM 控制算法使控制器输出 PWM脉冲控制逆变器电子开关的导通和关断,使逆变器输出三相电流 ia、ib和 ic的幅值、相位和频率与三相参考电流一致。然后再根据电动机的解耦变换,将 ia、ib和 ic变换到同步旋转坐标系下的电流id和iq。
在矢量控制下,id与直流电动机的励磁电流 If类似,iq与直流电动机的电枢电流 Ia类似。因此异步电动机的转矩可表示为

式中,K是转矩常数。从而,异步电动机可以获得类似于直流电动机的特性[5-6]。在矢量控制系统所有的运行过程中,这种电流的磁场定向是必须的。
2.2 基于矢量控制的特征参数的选取
从上述分析可知,逆变器输出三相电流特性是整个矢量控制系统的基本特性,它反映了整个矢量控制系统的质量和状态。因此,在对矢量控制系统中的逆变器进行故障诊断的时候,选择逆变器输出三相电流作为特征参数。
对于变流器,最严重的故障就是电力电子器件。如图1所示,VT1~VT6是功率开关器件。由于一相电流是由两个开关联合控制,因此只要一个开关故障,例如 VT1断路,ia将损失正向电压的驱动,因此,ia将几乎全为负值。而当 VT1故障时,在矢量控制的核心思想下——控制牵引电动机的磁场为一个以同步转速旋转的圆形磁场,ib和 ic的输出也会因此改变,如图2所示,图2为VT1故障时,在矢量控制下,ia、ib和ic的输出电流波形。

图2 VT1断路时,三相输出电流波形Fig.2 Current waveforms when VT1 fault
进一步分析,当正常情况下,由于矢量控制的作用,理论上三相电流各自的平均值应为 0。但当VT1~VT6出现故障时,由于会损失一部分至所有驱动,或者一直受一个驱动,从而会导致故障相的波形中直流分量显著增加,从而,在对波形采样的一个周期中,分布在0两侧的点数不再相等;此外,对于无故障相,由于处于矢量控制模式下,矢量控制为维持电动机磁场的圆形及同步转速,将会通过增加或者减少无故障相电流的直流分量来保证,如图2所示。
通过上述分析,本文选用ia、ib、ic的直流分量含量和ia、ib、ic各项一个周期中大于0的采样点数与总采样点数的比值作为矢量控制下变流器故障诊断的特征向量。
3 小波降噪和FFT的故障特征提取
3.1 小波降噪
如前所述,本文将采用 ia、ib、ic的直流分量含量和 ia、ib、ic各项一个周期中大于 0的采样点数与总采样点数的比值作为特征向量,因此,需要进行 FFT变换求得直流分量的含量。但由于在工业应用场合电磁干扰的影响,测得的信号必然会掺杂许多噪声干扰,而这些干扰将会影响对信号分析的正确性,因此进行变换之前需要对信号进行降噪处理。
小波分析的原理是:根据多分辨率理论,如果二进制离散小波函数簇{Ψj,k(t);j;k∈Z}构成L2(R)的标准正交基,则对信号x(t)有正交小波分解

式中 N——分解层数;
Φj,k(t)——由基本尺度函数Φ(t)得到的一簇二进制正交尺度函数。
从信号滤波的角度看,正交小波分解是将待分解信号通过一个高通滤波器和一个低通滤波器进行滤波,得到一组低频信号和一组高频信号,并对低频信号一直分解到第N层,每次分解得到的低频信号和高频信号都是原信号长度的一半,两者长度之和等于原信号的长度。在滤波后进行隔点采样,分解结果可以看作既不冗余,也不损失原信号的任何信息。
因此在对工业现场采集的信号进行降噪时,就可对信号进行小波分解,则噪声部分通常包含在高频系数中;然后对小波分解的高频系数以门限阈值等形式进行量化处理;最后再对信号重构即可达到消噪的目的。对信号消噪实质上是抑制信号中的无用部分,恢复信号中有用部分的过程。
综合以上分析,对采样电流信号的降噪处理可以分为以下几个步骤:
(1)将采样的电流信号分为近似部分和细节部分,即低频部分和离散部分,其中近似部分代表了信号的主要特征。
(2)变换尺度因子对低频部分再进行相似运算。
(3)重复(1)、(2),直到得到满意效果。
(4)对信号进行重构,恢复降噪后信号。
经过多次试验,采用了db3小波,对每相电流进行 5层分解,然后重构了去噪后信号[7],如图 3所示,降噪效果是满意的。
图4所示为正常波形降噪前与降噪后FFT变换功率谱图。
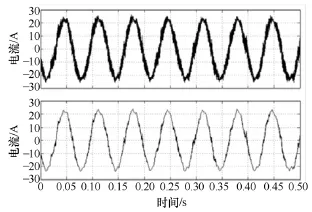
图3 降噪前后电流波形对比Fig.3 Comparison of current waveforms before and after denoise
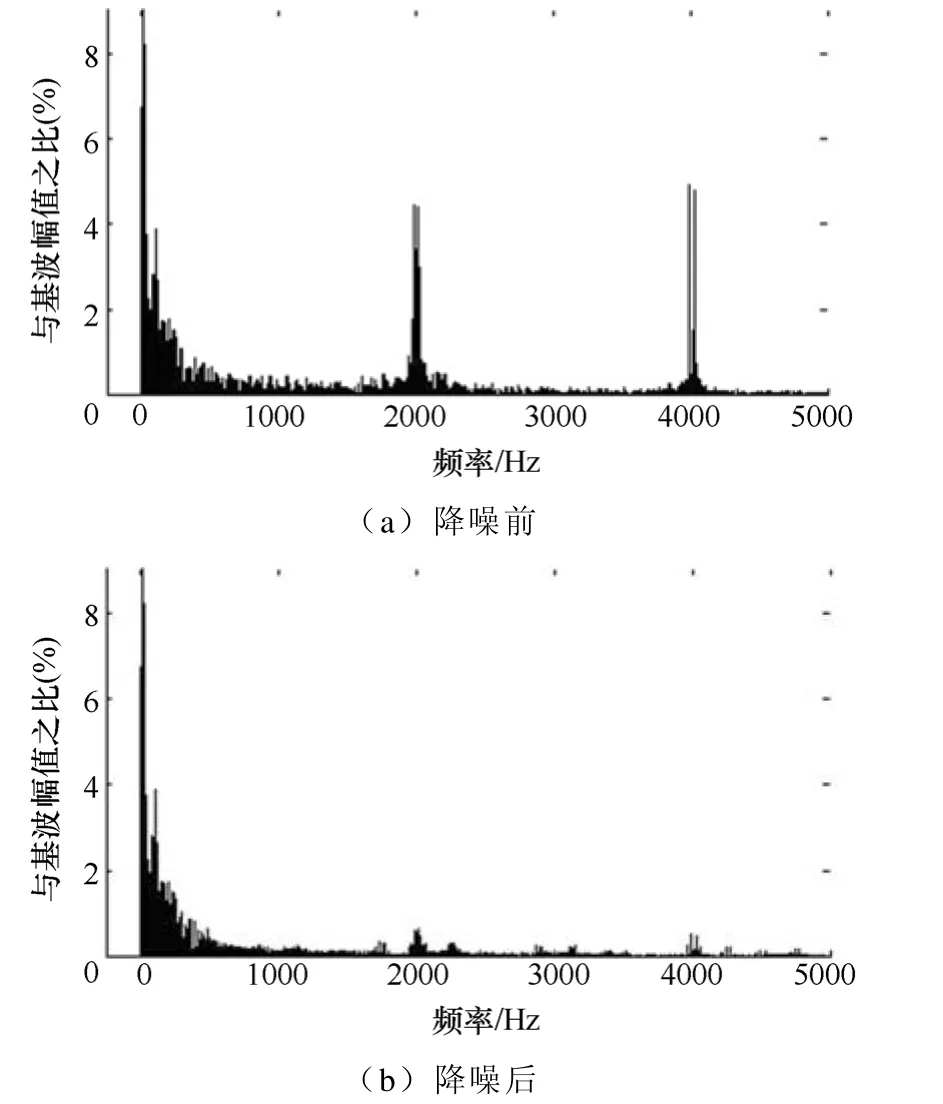
图4 降噪前后FFT变换对比Fig.4 Comparison of FFT result before and after denoise
从图中可以看到,经过降噪处理后,波形的高频噪声分量被滤除,达到了降噪的目的。
3.2 FFT变换和故障特征提取
经小波降噪后,需对降噪后信号进行故障特征提取。该故障特征的提取过程包括FFT变换,求出其直流分量的含量及通过采样点数计算各信号一个周期中大于0的采样点数与总采样点数的比值。由于电力电子器件的断路和短路故障是变流器的最主要故障,因此,下面以VT1断路为例,分析故障特征提取结果。
表1给出了在正常情况及VT1断路故障时,经FFT变换及相关计算后得出的故障特征提取的样本值。其中IAdc、IBdc、ICdc分别表示ABC三相电流的直流分量占基波分量的大小,IA0、IB0、IC0分别表示ABC三相电流的采样值中,一个周期中大于0的采样点数占总采样点数的大小。

表1 正常情况与VT1断路故障时样本数据Tab.1 Data of normal and VT1 fault condition
如前所述,在正常情况下,由于矢量控制的原理,控制电动机输入三相电流成为以同步转速旋转的圆形磁场,各相电流以相位相差120°的正弦波给出,并且直流分量几乎为零。因此,直流分量占基波分量的大小近似为0,一个周期中大于0与小于0的采样点数应几乎相等,所以一个周期中大于0的采样点数占总采样点数的比例应近似等于0.5。表1中的正常情况下特征提取结果与理论分析是一致的。
VT1管断路时,通过坐标分析各相电流变换规律,如图5所示。
如图5a所示,正常时电流合成矢量i1在ABC三相电流坐标轴上的投影为ia、ib、ic。为分析方便,以i1为纵轴,与之垂直的轴为横轴建立坐标系,如图5b所示,所得坐标系定义为L1-L2坐标系。正常情况下,某一时刻,ia、ib、ic在L1轴上的投影之和即为电流合成矢量i1,在L2上分量为0。如果下一时刻,VT1管断路,则ia变为ia1,如图5b所示。假设此时电流矢量还没有旋转,由于ia的减小,使得三相电流在 L1上的合成分量减少,因此会导致 i1减小。但是,矢量控制的原理是维持空间合成的磁动势矢量大小为定值,即三相电流矢量的空间合成是一个定值。因此,此时空间矢量的算法将控制沿矢量旋转方向的那个电流矢量增加,即图中ic电流直流分量将增加到ic1。ic的增加一方面弥补了i1的减少,另一方面给出了使i1旋转的分量,从而使得i1大小保持不变,并且继续以同步转速旋转。因此,ic的正向直流分量将增加,并且一个周期中大于 0的采样点数占总采样点数的比例增加。而对于电流ib,由于不需要它对i1的补偿贡献直流分量,因此,ib的直流分量依然近似于 0,但由于变流器外特性需要,三相电流瞬时值之和应该为 0。因此,在 ic增加其正向电流时,ib会减少其正电流或增加其负电流来满足外特性需求。所以,ib在一个周期中采样点的负值将增加,即大于0的采样点数占整个周期采样点数的比例将减少。
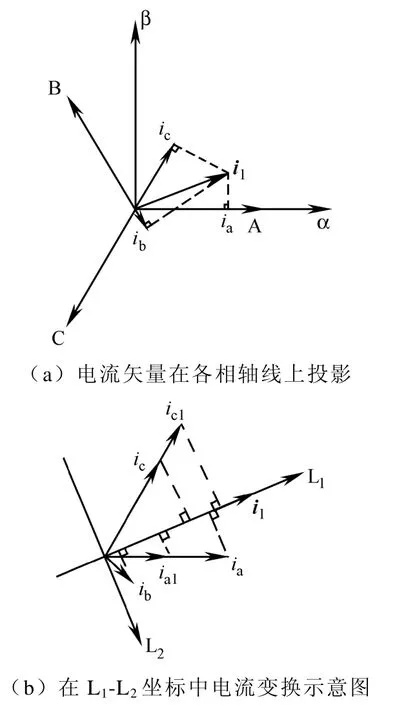
图5 VT1断路故障时的电流分析Fig.5 Current analysis when VT1 fault
表1中,在VT1断路故障时,ib和ic的直流分量的含量数据及一个周期中大于0的采样点数占总采样点的比例的数据与上述理论分析的结果完全一致。
4 基于BP神经网络的故障模式识别
4.1 故障模式编码
对于变流器故障,最常见的为电子开关器件的故障,即图 1中所示 VT1~VT6,但是由于 6只管的故障模式可以为=720个故障,而工业现场并不会产生如此之多的故障,因此,本文仅以 VT1~VT6的典型故障进行编码,并由于篇幅的限制,仅列出断路时的典型故障,省略短路的典型故障编码。VT1~VT6典型的断路故障类型可以分为I类正常、II类单管断路、III类同桥臂两管断路、IV类同极性两管断路、V类交叉两管断路。具体类别及详细描述见表2。

表2 典型故障模式编码Tab.2 Code of classic fault modes
4.2 基于BP神经网络的故障模式识别
BP神经网络中的神经元多采用 S型函数作为活化函数,利用其连续可导性,便于引入最小二乘学习算法,即在网络学习过程中,使网络的输出与期望输出的误差边向后传播边修正连接强度(加权系数),以期使其误差方均根值最小。
本文采用 BP神经网络对样本数据进行训练,确定网络参数后,对输入故障数据计算从而识别故障模式,达到故障诊断的目的。
网络的输入层神经元个数为 6,输出神经元个数为 7,隐含层神经元个数根据经验公式为n2=2n1+1计算,因此,隐含层神经元数为13,采用一个输入层、一个隐含层和一个输出层,Sigmoid作为活化函数组成网络。在确定网络结构后,就需采用样本数据对网络进行训练,训练步骤如下:
(1)加权系数初始化:用较小的随机数为BP神经网络的所有加权系数置初值,准备训练数据,给出N组训练信号输入矢量组X=(x1, x2, …, xi)T和期望输出矢量组D=(d1, d2, …, dj)T,令n=1。
(2)取Xn和Dn按前向计算公式oj=f(neti)计算隐含层和输出层的各神经元的输出,其中

式中 neti——神经元i的净输入;
ωij——连接权系数;
f(·)——输出变换函数。
(3)按式(4)计算网络输出与期望输出之差的函数。

(4)按式(5)计算输出层加权系数的调整量∆ωki,并修正加权系数。

(5)按式(6)计算隐含层网络加权系数的调整量∆ωij,并修正加权系数。

(6)n=n+1返回到(2),直到 Ep进入设定的范围为止。
图6所示为通过一定样本训练后的网络训练结果[8-11]。

图6 神经网络训练结果Fig.6 Result of train of neural networks
该组数据在经过117次训练后,网络输出误差是6.2201×10-5,与期望6.0×10-5的误差相差很小。因此可以认为训练完成,并达到期望值。
完成后输入表 3的 VT2断路故障数据进行验证。

表3 VT2断路故障数据Tab.3 Data of VT2 fault
输出结果为 T=(0.0011 0.0026 1.0001 0.0014 0.0027 0.9945 0.0004),即是VT2故障时的故障代码T=(0 0 1 0 0 1 0)。因此识别结果是正确可行的。
5 结论
不同的控制方法使变流器故障时的故障特征不同。采用矢量控制的变流器的三相输出电流包含了变流器的主要故障特征。通过理论分析和具体实验数据验证,矢量控制的变流器故障其故障特征主要表现在三相电流的直流分量及一个周期中大于0的采样点数占总采样点数的百分比。通过小波去噪,FFT和相应计算提取了故障特征参数,并且通过神经网络对故障模式进行了识别。实验表明,该方法对矢量控制的变流器典型故障诊断是可行的。
[1]刘春生. 复杂非线性系统的智能故障诊断与容错控制[D]. 北京:北京航空航天大学,2006.
[2]Wang Zhe, Guo Qingding. The diagnosis method for converter fault of the variable speed wind turbine based on the neural networks[C]. Second International Conference on Innovative Computing, Information and Control, 2007: 615.
[3]Lorenzo Ciani, Marcantonio Catelani, Gaetano Iuculano.Fault diagnosis on board for analog to digital converters[C]. IEEE Proceedings of Instrumentation and Measurement Technology Conference, 2007: 1-4.
[4]Mariscotti A. Neural network approach to static converter faults diagnosis[C]. Proceedings of the IEEE International Symposium on Industrial Electronics,1995, 1: 375-380.
[5]Bimal K Bose. Modern power electronics and AC drives[M]. 北京:机械工业出版社,2002.
[6]胡崇岳. 现代交流调速技术[M]. 北京:机械工业出版社,1998.
[7]葛哲学,沙威. 小波分析理论与MATLAB R2007实现[M]. 北京:电子工业出版社,2007.
[8]王仲生. 智能故障诊断与容错控制[M]. 西安: 西北工业大学出版社,2005.
[9]鄂加强. 智能故障诊断及其应用[M]. 长沙: 湖南大学出版社,2006.
[10]飞思科技产品研发中心. MATLAB 6.5 辅助神经网络分析与设计[M]. 北京:电子工业出版社,2003.
[11]Stuart Russell,Peter Norving, 等. 人工智能—— 一种现代方法[M]. 姜哲,金奕江,张敏,等译. 2版. 北京: 人民邮电出版社, 2004.