采样延迟和误差对三电平PWM整流直接功率控制性能的影响及其抑制方法
2010-06-30赵争鸣张颖超袁立强
鲁 挺 赵争鸣 张颖超 袁立强
(1. 清华大学电机系电力系统及发电设备安全控制和仿真国家重点实验室 北京 100084 2. 重庆通信学院电力工程系 重庆 400035)
1 引言
电力电子装置的主电路由线路、电阻、电感和电容等无源器件和功率半导体等有源器件构成。电力电子装置中的电磁能量变换与传输以它们作为载体,在实现电磁能量变换的同时,其蕴含的能量特征(电量波形和特征参数等)也实时反映着系统的状态[1]。对于具有闭环控制结构的电力电子装置,其数字控制系统需要提取部分模拟量的特征参数,经过传感器、信号调理、模数(A/D)转换等采样环节的处理和传播,最终转化成适合数字控制芯片和离散控制方法的数字量并反馈到控制算法中,参与控制策略的实施。随着控制芯片速度和精度的不断提高,采样速度和精度有时会成为限制控制性能的瓶颈。
各类物理量在采样环节中传输和转换时会产生延迟和畸变,造成反馈数字量的时间滞后和信息失真,这将直接影响控制系统对装置运行状态的观测和控制策略的实施,最终使控制性能恶化。在大容量电力电子装置中,由于装置体积增大以及绝缘和抗电磁干扰等要求的提高,有时必须将通信电路引入采样环节中,而通信造成的延迟和误差将使上述问题更加突出[2]。
本文针对采用直接功率控制策略的中点钳位三电平PWM整流器,研究了采样延迟和误差对控制性能的影响,提出了抑制采样延迟和误差的方法。
2 三电平PWM整流器直接功率控制
在多种 PWM整流控制方法中,直接功率控制(DPC)由于其出色的动态性能而被广泛地研究和应用[3-4]。三电平PWM整流器的直接功率控制原理框图如图 1所示[5]。开关表根据有功、无功功率指令值和实际值的比较结果,以及电网电压矢量所在的空间位置,选择合适的矢量控制有功和无功功率。
DPC策略中有功和无功功率的计算公式为[6]

式中 p, q——整流器从电网吸收的有功和无功功率;
eα, eβ——α-β坐标系下的电网电压;iα, iβ——α-β坐标系下的电网电流。
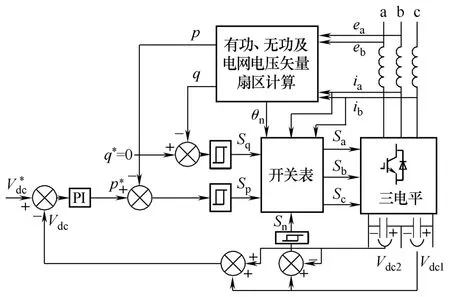
图1 三电平直接功率控制原理框图Fig.1 Block scheme of DPC for three-level PWM rectifier
3 采样延迟和误差对控制性能的影响
采用上述DPC控制方法进行实验时,发现系统的性能并不令人满意,实测功率因数仅在 0.993左右,电网电流正弦度差,总谐波畸变率(THD)高于6%,如图2所示。

图2 电网电流稳态实验波形及其频谱Fig.2 Experimental waveform of power source current and its spectrum in steady-state
进一步实验观察发现,实际的电压、电流模拟量与控制系统采样得到的数字反馈量之间存在较大的延迟和畸变。图3所示为电网A相电流实际值iA和采样值iA_sample的对比实验波形。其中,采样值波形是将数字信号处理器(DSP)中的数字反馈信号经数模(DA)芯片实时地转换成模拟信号再经测量得到的。即使考虑DA芯片的最大转换时间10µs,电流采样值相对实际值仍存在100µs以上的延迟;实际电流和采样值不同时过零,说明采样环节存在直流偏置;除此之外,实际电流波形中的高频有用信号在采样环节中被滤除,产生了采样误差。

图3 电流实际值和采样值实验波形Fig.3 Experimental waveforms of actual power source current and its sampling value
3.1 采样延迟的影响
电网电压、电流采样值相对实际值产生了采样延迟,DPC控制系统通过式(1)计算出的有功功率和无功功率采样值 psample和 qsample也随之产生延迟。带有延迟的功率采样值在滞环控制器中与指令值比较时,会对控制脉冲产生影响。以无功功率为例,如图4所示,t1时刻实际的无功功率q刚刚过0变负,理想情况下需要对整流器施加控制脉冲使q增加,但是由于采样延迟的存在,在延迟时间Tdelay内,qsample仍为正,经过滞环控制器和开关表得到的控制脉冲继续使q减小,使无功功率相对其指令值的误差继续增大,直到qsample过0变负时刻t2为止。在稳态过程中,这种采样延迟引起的控制脉冲滞后使功率实际值在其指令值两侧产生较大波动,导致电流谐波增加和功率因数下降;在动态过程中,采样延迟引起的控制脉冲滞后使实际功率跟踪指令值的速度即动态响应减慢,使动态性能恶化。

图4 无功功率实际值和采样值实验波形Fig.4 Experimental waveforms of actual reactive power and its sampling value
3.2 采样误差的影响
3.2.1 直流偏置的影响
假设在稳态时,A相电流采样存在直流偏置

式中 iA_sample——A相电流采样值;
iA——A相电流实际值;iA_err——A相电流采样直流偏置误差。变换到α-β坐标系下,得
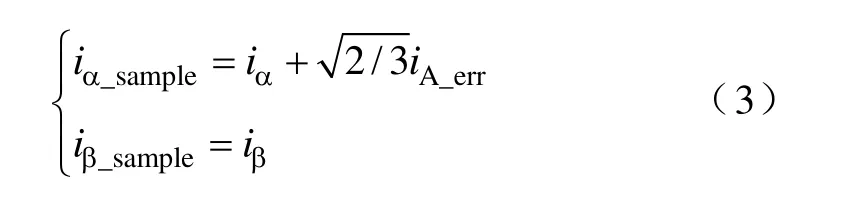
式中 iα_sample, iβ_sample——α-β坐标系下电流采样值;iα, iβ——α-β坐标系下电流实际值。假设电网电压对称正弦,即
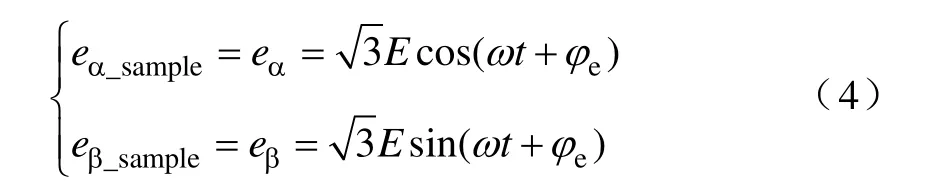
式中 eα_sample, eβ_sample——α-β坐标系下电压采样值;eα, eβ——α-β坐标系下电压实际值;
E——电网相电压有效值;
ω ——电网相电压角频率;
φe——电网A相电压初相角。
将式(3)和式(4)代入式(1),得

式中 psample, qsample——整流器有功和无功功率采样值;
p, q——整流器有功和无功功率实际值。
可以看出,由于采样直流偏置误差的存在,控制系统功率采样值在真实值的基础上叠加了以电网电压基波频率振荡的功率误差。控制器发出的控制脉冲对功率的调节力度也随之呈周期性变化,使实际功率也产生以电压基波频率振荡的功率误差,继而使直流母线电压产生同频率振荡的电压误差。一相电流 5%的直流偏置采样误差产生的有功、无功功率和母线电压波动误差的仿真波形如图5所示,其中0.3s时整流器的负载功率发生了阶跃突变。可以看出采样误差对动态性能的影响不大,而且功率和直流母线电压上的波动与整流器的负载功率和输入功率无关,只由直流偏置采样误差和电网电压决定。
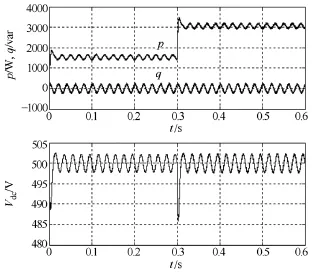
图5 电流采样存在直流偏置误差时有功功率、无功功率和直流母线电压仿真波形Fig.5 Simulation waveforms of active power, reactive power and dc voltage while there is offset error in sampling
设稳态时从网侧吸收的功率可表示为

式中 p0, q0——有功和无功功率中的直流成分;
p1, q1——有功和无功功率中波动成分的幅值;
φp1, φq1——有功和无功功率波动成分的初相角。
由式(1)、式(4)和式(6)可得到α-β坐标系下电网电流的表达式,继而推导出abc坐标系下电网电流表达式如式(7)所示。

可以看出,直流偏置采样误差不但使电网电流产生直流分量,还在电流上叠加了2次谐波。电流直流分量和2次谐波随着采样误差的增加而增大。图6所示仿真结果验证了上述理论分析的正确性。
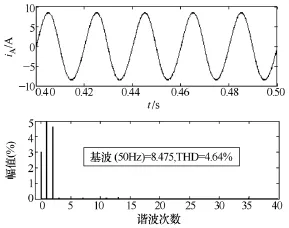
图6 电流采样存在直流偏置误差时仿真波形及频谱Fig.6 Simulation waveforms and spectrum of power source current while there is offset error in sampling
3.2.2 幅值误差的影响
假设在稳态时,A相电流采样存在幅值误差

式中 kA_err——A相电流采样幅值误差系数。则在α-β坐标系下

代入式(1)可得

稳态电流中主要成分是和电网电压同相位的基波分量,故可认为

式中 I——A相电流基波有效值。
代入式(10)得到

由于采样偏置误差的存在,控制系统由采样值计算出的有功和无功功率在真实值的基础上叠加了以2倍电压基波频率振荡的功率误差。因此实际功率和母线电压也产生以2倍基波频率的波动。
设稳态时从网侧吸收的功率可表示为

式中 p2,q2——功率二倍频波动成分的幅值;
φp2,φq2——功率二倍频波动成分的初相角。
经过类似的推导过程,可以得到

可见,采样幅值误差使电网电流产生基波和 3次谐波误差。
以上分析可扩展至采样误差是任意n次谐波的情况,此时有功、无功功率和直流母线电压存在n+1次网侧电压频率的波动,最终造成电网电流存在 n次和n+2次谐波。应用叠加原理,可以推导出当电网电压或电流采样同时存在直流偏置和幅值误差时,会使电网电流同时产生直流偏置和 2次、3次谐波,这也就是图2中幅值较大的2次、3次谐波产生的主要原因。
4 采样延迟和误差的抑制方法
4.1 硬件方面
目的是减小采样环节中AD转换之前的传感器和模拟量调理电路产生的转换和传输延迟,提高硬件电路的传输带宽。
4.1.1 传感器选型
根据采样功率模拟量的特点选择具有合适量程和带宽的传感器。以电流传感器为例,从图3可以看出,为了达到较好的控制性能,需要提取的不仅是电网电流的基波分量信息,还包括其高频分量信息,所以选用的传感器除了要具有合适的量程之外,还要具有足够高的频带宽度。原则上,电流传感器的带宽不应低于控制系统的采样频率。本文中PWM整流器的采样频率为 60kHz,因此选用了 150kHz带宽的电流传感器。
4.1.2 模拟量调理电路优化
通过电路分析结合实验,对模拟量调理电路的参数进行优化。模拟量调理电路的主要功能是将传感器的输出转换成适合于AD模块输入的模拟量[7],调理电路中设置了一些低通滤波环节,目的是滤除噪声信号,提高采样电路抗干扰能力。理论上,低通滤波的通带截止频率越低,滤除的噪声成分越多。但是,过低的截止频率也可能使频率较高的有用信号产生衰减和延迟。与传感器的带宽选择原则类似,各低通滤波环节的截止频率设置一般要高于系统采样频率。具体的与滤波环节相关的调理电路参数要结合实验效果来进行优化设置,目标是在滤除噪声和保留高频有用信号之间达到较好的折中。
本文采用的模拟量调理电路如图7所示。通过电路分析可知,调理电路中存在两个一阶有源低通滤波环节和一个一阶无源低通滤波环节,它们的截止频率分别为1.59kHz、15.9kHz和3.12MHz。这三个低通滤波环节在电路中是串联关系。为了保留采样信号中的高频有用成分,应提高两个通带较窄的低通滤波环节的截止频率。由于与截止频率有关的电阻阻值同时决定着信号调理的转换系数,所以对调理电路的优化主要着重于调整滤波电容。结合实验效果对优化方案进行调整,最终确定具体的优化方案如图7中标注所示。优化后,两个有源低通滤波环节的截止频率分别提高到66.3kHz和79.6kHz。
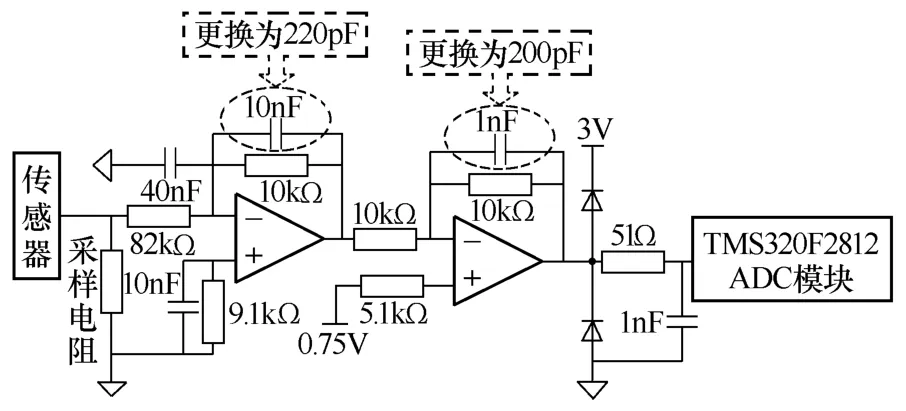
图7 调理电路及其具体优化方案Fig.7 Conditioning circuit and its optimization method
4.2 软件方面
主要包括AD转换的软件配置和流程、控制芯片中数字量调理的优化以及采样时刻的合理选择。
4.2.1 AD转换模块参数配置
理论上,AD转换时钟频率越低,采样窗口越宽,AD转换的抗干扰能力越强,转换结果越精确[8]。但是,对于采样频率较高的DPC方法,每个采样周期时间很有限,低时钟频率或宽采样窗口会使整个AD转换时间增长,如果 AD转换总时间和每周期控制策略执行时间的总和超过采样周期时间,则会影响控制策略的正常实施,造成控制性能的急剧恶化。因此需要合理配置AD转换模块的参数,在保证AD转换和算法执行总时间不超过采样周期的前提下,使AD转换尽量获得较宽的采样窗口。
本文中DPC算法的采样频率为60kHz,即每个采样周期为16.7µs。经实测,每周期DPC算法的执行时间为15µs左右。考虑到算法执行时间的波动,每个采样周期中AD转换的总时间应控制在1µs以内。因此,将 ADC时钟配置为 37.5MHz,采样窗口宽度配置为5个ADC时钟周期,完成6个通道的转换共需0.96µs。这样,在满足程序执行实时性要求的情况下,实现了采样窗口宽度的最大化。
4.2.2 AD转换程序流程优化
实验中发现,原AD转换程序流程对转换结束的判断并不可靠。程序流程可能在本采样周期 AD转换没有结束时读取转换结果,而此时AD转换结果寄存器中的数据仍是上个采样周期的转换结果,因此会在AD转换环节产生一个采样周期的采样延迟。为了抑制这种AD软件不合理产生的采样延迟,针对本文 PWM整流器中使用的 TMS320F2812的AD转换模块[9],优化其程序流程如图8所示。

图8 优化的AD转换程序流程Fig.8 Optimized flow chart for AD conversion
4.2.3 采样误差的软件修正
这部分在数字量调理软件中完成。数字量调理是采样过程的最后一个环节,在此环节中要对采样量在前面各环节中积累的畸变进行校正,尽量减小输入到控制算法中反馈量的直流偏置和幅值误差。
理想情况下,被测模拟量x和经传感器、调理电路和AD转换后得到的数字量y之间的关系是[10]

式中,a为传感器增益、模拟量调理电路增益和AD转换增益的乘积,即a=ksensor×kcircuit×4095/3。对于直流量采样,b=0;对于交流量采样,b=2048。
实际系统中,由于采样电路参数及AD转换的非理想性和非对称性,式(15)并不严格成立。为了在数字量调理中,由AD转换得到的数字量较精确地计算出被测模拟量,必须对式(15)进行修正。
首先,在采样环节的前端,即传感器的输入侧施加一组校正模拟量,用精度较高的电压表、电流表或示波器等测出控制算法所需要的特征参数值(电压、电流、频率等),并在AD转换的输出处记录这组校正模拟量对应的数字量。值得注意的是,对于交流量采样通道,修正时施加的校正模拟量应尽量平均分布在系统实际工作范围内;而对于直流量采样通道,校正模拟量应集中在此直流量额定工作点附近。
然后,根据实测校正模拟量和采样得到的校正数字量,用最小二乘法拟合[11]

得到修正比例系数a′和修正偏置系数b′。
最后,将这组修正系数作为数字量调理软件的计算参数。在每个采样周期 AD转换结束后,AD转换结果和式(16),计算出修正了直流偏置和幅值误差的被采样模拟量的特征参数,从而得到反馈数字量,并反馈到控制算法中。
4.2.4 采样时刻的选择
在满足算法执行时间的前提下,尽量使采样时刻远离开关动作时刻,以减小开关动作对采样的干扰。本文三电平 PWM整流器的开关动作时刻靠近采样周期的结束时刻,所以控制系统选择在每个采样周期的中间时刻进行采样和AD转换。
5 实验结果
对本文三电平 PWM整流器采样环节进行了上述改进之后,实验得到电网电流实际值iA和采样值iA_sample波形如图9所示。通过波形可测出采样值相对实际值的延迟时间在13µs左右,这其中还包括了DA芯片的转换时间。因此,采样环节的延迟时间被可靠控制在一个采样周期(16.7µs)以内;实际电流和采样值过零点基本同步,说明采样环节的直流偏置很小,通过实验波形数据计算得出,改进后采样环节的相对直流偏置误差和幅值误差分别在1.5%和 1%以下;相对改进采样环节之前的实验波形,改进后采样值和实际值的波形相似程度大大提高,说明实际模拟量中的高频有用成分在经过采样环节后基本没有衰减,采样环节的传输带宽基本满足了DPC算法的要求;同时,由于采样延迟和误差的减小,DPC算法对电网电流的控制更加及时和迅速,电流波形上高频波动的幅值明显减小。
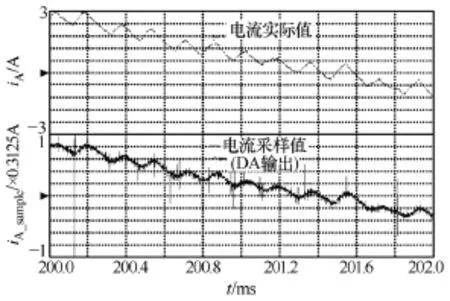
图9 采样环节改进后电流实际值和采样值实验波形Fig.9 Experimental waveforms of actual power source current and its sampling value after the optimization
改进采样环节后的电网电流iA实验波形及其频谱如图10所示,在有效抑制了采样延迟、直流偏置误差和幅值误差之后,电网电流波形大幅度改善,主要由采样误差引起的 2次、3次谐波含量分别从改进前的4.5%和2.9%降低到1.8%和0.4%,其他高次谐波幅值也不同程度地有所下降,改进后电流THD约为2.91%,比改进前降低了一半以上。同时用数字功率仪测出,改进后整流器的功率因数上升到0.998以上。

图10 采样环节改进后电网电流实验波形及其频谱Fig.10 Experimental waveforms of power source current and its spectrum after the optimization
图11所示为采样环节改进后的电网电压 eA、电网电流iA、直流母线电压Vdc和中点电压VNP的稳态实验波形。可以看出,电网电流正弦度高,且与电网电压同相位。直流母线电压稳定,没有出现采样误差引起的二倍频或三倍频的波动分量。中点电位始终处于平衡状态。
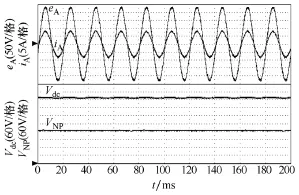
图11 采样环节改进后稳态实验波形Fig.11 Experimental waveforms after optimization
6 结论
本文利用理论推导、仿真和实验结合的手段,分析了采样延迟和误差对三电平 PWM整流器直接功率控制性能的影响和根本原因,从硬件和软件两方面提出了对控制延迟和误差进行抑制和校正的方法,系统地解决了原采样环节延迟时间长、传输带宽低、直流偏置和幅值畸变严重等问题。改进了采样环节之后,电网电流谐波、功率纹波和直流母线电压纹波显著减小,三电平 PWM整流器的直接功率控制性能得到了提高。
[1]赵争鸣, 白华, 袁立强. 电力电子学中的脉冲功率瞬态过程及其序列[J]. 中国科学E辑, 2007, 37(1):60-69.Zhao Zhengming, Bai Hua, Yuan Liqiang. Transient of power pulse and its sequence in power electronics[J]. Science in China Series E, 2007, 37(1):60-69.
[2]鲁挺, 赵争鸣, 张颖超, 等. 大容量变换器中 CAN通信软件的优化设计[J]. 清华大学学报(自然科学版), 2007, 47(10): 1566-1569.Lu Ting, Zhao Zhengming, Zhang Yingchao, et al.Optimized CAN communications software in high power converters[J]. Journal of Tsinghua University(Science and Technology), 2007, 47(10): 1566-1569.
[3]Zhang Y C, Zhao Z M, Mohamed E, et al.Performance evaluation of three control strategies for three-level neutral point clamped PWM rectifier[C].IEEE Applied Power Electronics Conference, 2008:259-264.
[4]Malinowski M, Kazmierkowski M P, Trzynadlowski M. A comparative study of control techniques for PWM rectifier in ac adjustable speed drives[J]. IEEE Transactions on Power Electronics, 2003, 18(6):1390-1396.
[5]张颖超, 赵争鸣, 袁立强, 等. 三电平PWM整流器直接功率控制[J]. 电工技术学报, 2008, 23(5):62-68.Zhang Yingchao, Zhao Zhengming, Yuan Liqiang, et al. Direct power control for three-level PWM rectifier[J]. Transactions of China Electrotechnical Society, 2008, 23(5): 62-68.
[6]王兆安, 杨君, 刘进军, 等. 谐波抑制和无功功率补偿[M]. 北京: 机械工业出版社, 2006.
[7]鲁挺, 赵争鸣, 张颖超, 等. 基于双 DSP的电力电子变换器通用控制平台[J]. 清华大学学报(自然科学版), 2008, 48(10): 1541-1544.Lu Ting, Zhao Zhengming, Zhang Yingchao, et al.General-purpose control platform based on dual DSPs for power electronic converters[J]. Journal of Tsinghua University (Science and Technology), 2008,48(10): 1541-1544.
[8]苏奎风, 吕强, 耿庆锋, 等. TMS320F2812原理与开发[M]. 北京: 电子工业出版社, 2005.
[9]Texas Instruments Incorporated. TMS320C28x系列DSP的CPU与外设[M]. 张卫宁, 译. 北京: 清华大学出版社, 2005.
[10]郝晓弘, 王东文. DSP中AD转换模块非线性的神经网络补偿研究[J]. 计算机测量与控制, 2004, 12(5):483-485.Hao Xiaohong, Wang Dongwen. Study on nonlinearity compensation of AD converter in DSP by neural network[J]. Computer Automated Measurement and Control, 2004, 12(5): 483-485.
[11]胡广书. 数字信号处理[M]. 北京: 清华大学出版社,1997.