自动控制理论实验教学研究
2010-06-12杜欣慧宋建成胡慧敏
杜欣慧,王 瑛,宋建成,胡慧敏
(太原理工大学电气与动力工程学院,山西太原030024)
0 引言
自动控制理论是研究有关自动控制技术基础理论的一门课程,是电气工程及其自动化专业的专业基础课,是学生接触的第一门控制类课程,又是电气系学生后续专业课的前绪课程,因此学生对控制理论的掌握程度,直接影响到其它课程的学习。自动控制理论实验课程同时又是一门实践性很强的课程,通过实验可增进学生的理解,减轻或消除学习困难,也是培养学生分析能力、动手能力、创新能力、自主学习能力的重要环节。因此,自动控制理论课程实验是自动控制理论课程教学中必不可少的重要环节。然而,目前自动控制理论课程学时减少,实验学时更少,那么如何在较少的实验学时内使学生掌握更多的实验技能,本文作者给出了自己的一些经验。
1 传统的自动控制理论课程实验教学
自动控制理论课程实验受限于实验设备与器材条件,因此各高校自动控制理论课程的实验教学也不尽相同。大多数学校使用模拟仿真器,我校使用的自动控制理论实验箱是浙江求是科教设备有限公司生产的ACT-1型实验箱。自动控制理论实验箱在使用中最大的不足就是其灵活性与扩充性受到极大的限制。由于实验内容有限,每个实验中实验电路基本是固定的,电路中可变化的实验参数又是有限的。学生做实验,只要熟悉实验指导书内容、按实验指导书接线,按步骤操作,即可在计算机屏幕上出现实验曲线,学生记录实验数据及曲线,实验即宣告完成。一般情况下,实验指导教师还会在实验前进行详细的讲解和说明。这样,学生很快就会把实验结果做出来。在这种实验模式下,综合性、设计性实验较少,学生没有热情,依赖性强,独立分析问题和解决问题的能力较低,更没有创新性。
2 MATLAB在自动控制理论课程实验中的应用
MAT LAB是目前国际上最流行的控制系统计算机辅助设计的软件工具,MATLAB环境下的动态仿真集成环境Simulink是一个对动态系统进行建模、仿真和分析的软件包。在利用MATLAB结合Simulink进行仿真时,可以充分运用其方便的人机交互方式,设计出界面生动、形象、直观的自动控制系统。并且在仿真过程中,可以任意修改模型的各个参数,从而绘制出不同的仿真曲线,分析结果进行实时直观的图形化显示。
MAT LAB及其软件工具包的开发,使得它在自动控制方面的应用愈来愈普遍。自动控制软件包主要担任自动控制领域里的大量繁琐的计算与绘制仿真曲线的任务。软件包运行环境MATLAB6.5及以上版本,在这个环境下,我校电气工程及其自动化专业所开设的实验有:连续系统的“典型一阶系统阶跃响应”,“一般系统阶跃响应”,“单位脉冲响应”,“控制系统的零极点分布图”,“控制系统的根轨迹图”,“控制系统的 Bode图”,“控制系统的Nichols图”,“控制系统的Nyquist图”,“典型非线性环节对系统的影响”等实验。离散系统的“离散系统阶跃响应”,“离散系统脉冲响应”,“离散系统根轨迹图”,“离散系统Bode图”,“离散系统的 Nichols图”,“离散系统的Nyquist图”等实验。
图1、图2和图3所示分别为利用MAT LAB仿真软件所做的控制系统的Nichols图,控制系统的Nyquist图和绘制的根轨迹图。
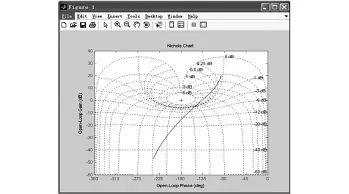
图1 控制系统的Nichols图
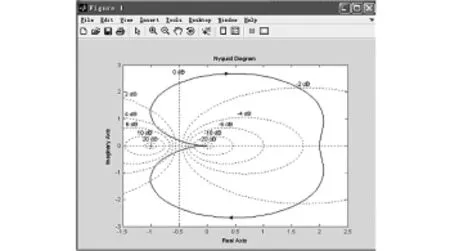
图2 控制系统的 Nyquist图
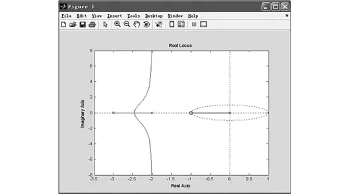
图3 根轨迹图
3 自动控制理论课程综合设计实验研究
基于MAT LAB结合Simulink的实验模式是一种借助于纯数学模型进行实验的模式,其便于操作,扩展性好。基于Simulink仿真软件设计的自动控制系统调试时,可以利用软件中元器件库提供的虚拟的电子元器件、信号源、控制器件及电子仪器,可以像实际电路接线一样,组成典型的控制环节和系统,十分简单方便。
线性系统的校正是控制理论的一个重要内容,且工程实践性很强。对于这种设计性实验,我们对学生的基本要求是提交设计方案和实验报告,鼓励学生自己动手设计校正方案搭建实验平台。实验内容既有实物模拟实验,又有上机仿真实验,通过实验使学生增强了感性认识,同时理性认识也获得升华。通常上机实验安排2个学时来完成。
线性系统校正实验要求学生熟悉串联校正装置对线性系统稳定性和动态特性的影响,掌握串联校正装置的设计方法和参数调试技术。学生首先要根据动态特性设计串联校正装置,计算校正装置参数。接着在加入串联校正装置后观测校正装置参数改变对系统性能的影响。然后对线性系统串联校正装置利用MATLAB进行计算机仿真。最后比较电路模拟和数字仿真结果。
例子:设单位反馈控制系统的开环传递函数。若要使系统开环超调量满足,相角裕度不小于50°,幅值裕度不小于10dB,试求系统的校正装置。
校正前系统的模拟电路如图4所示。
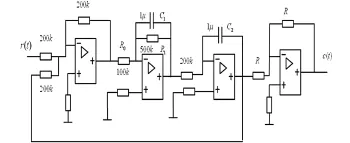
图4 校正前系统的模拟电路
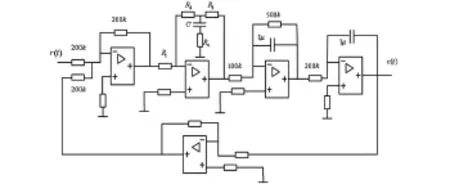
图5 校正后系统的模拟电路
利用MATLAB可以得到校正前和校正后系统的伯德图,分别如图6和图7所示。
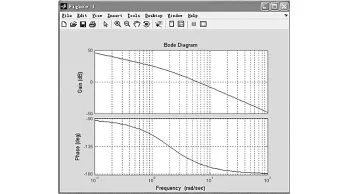
图6 校正前系统的伯德图
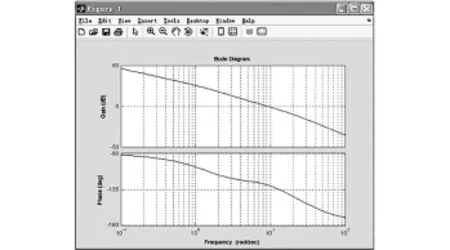
图7 校正后系统的伯德图
在Simulink仿真环境下采用超前校正装置,Simulink模型如图8所示,其中校正前和校正后系统的闭环单位负反馈阶跃响应曲线如图9、图10所示。
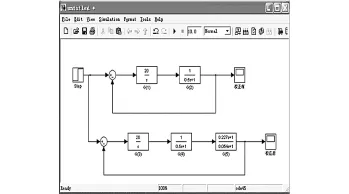
图8 加校正环节前、后的仿真模型
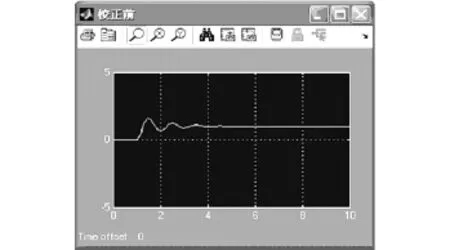
图9 校正前的单位阶跃响应曲线
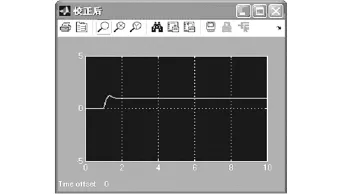
图10 校正后的单位阶跃响应曲线
4 结束语
自动控制理论的实验教学,既要培养学生的分析问题和解决问题的能力,还要重视培养学生的思维能力和创新能力。在实验的安排次序上由简单到复杂,由验证性实验到设计性实验,最后进行综合性实验,由浅入深,循序渐进。我校目前自动控制理论实验学时分配如下:基础验证性实验2学时,MATLAB仿真实验2学时,综合设计实验2学时。经过这样的实验学时安排,取得了较好的实验效果,学生的科研素养和分析问题解决问题的能力得以大大提高,既使学生加深了对控制理论的理解,又能掌握把控制理论应用于实际控制系统的方法和技能。
[1] 买买提热依木.阿布力孜,帕孜来提.马合木提.MAT LAB在自动控制理论虚拟实验开发中的应用[J].实验室研究与探索,2005,(24):173-176
[2] 高林,刘文定,王东林等.自动控制理论课程综合、创新型实验研究[J].中国现代教育装备,2008,(06):105-107
[3] 王培良.自动控制理论课程建设与改革的探索[J].电气电子教学学报,2005,(27):21-23
[4] 王立红.关于自动控制理论课程教学改革的几点思考[J].辽宁工学院学报,2005,(07):123-124
[5] 周昌民.自动控制理论实验的一种改革——随动系统串联校正的实现[J].实验室研究与探索,2001,(20):39-41
[6] 刘振全,薛薇,齐国元.自动控制理论课的实验教学改革探讨[J].电气电子教学学报,2005,(27):90-92
[7] 冯巧玲.自动控制原理[M].北京:北京航空航天大学出版社,2003
