基于邻接矩阵法的独立电网拓扑分析研究
2010-06-05程路尧庄浩俊李哲
程路尧 庄浩俊 李哲
(1. 中国人民解放军91336部队,秦皇岛 066326;2. 中国人民解放军 91656部队, 上海 200439;3. 海军工程大学电气与信息工程学院,武汉 430033)
1 引言
电力系统网络拓扑分析是根据电网的开关状态分析给出电网的拓扑结构,将电网表示成便于电力系统分析计算的模型,并且识别解列后的子系统。网络拓扑分析是电力系统仿真和分析计算的基础。
对于陆地大电网的拓扑分析,现有方法主要为:树搜索法[1-4]和关联矩阵法[5,6]。邻接矩阵法采用邻接矩阵来描述图中两点的连通关系,直观性较好,但在时间开销上,它的运算次数是O(n3)级的,且随着节点增加,其数据存储空间和时间开销将随节点数n的平方增长。树搜索法主要有广度优先搜索法[7,8]和深度优先搜索法[9,10],但该方法对环形网络和网状网络的适应性较差。
独立电网主要用于一些对供电连续性要求很高的重要部门和设备,如船舶、飞机、钻井平台等电力系统。与陆地大电网不同的是,独立电力系统的供、配电网络之间距离较近;整个电网的容量和单个负荷的功率之间的差额以及电压等级间的差额较小;供、配电网络需要同时考虑等,因此,需要结合独立电网的实际对其拓扑分析进行研究。
目前独立电网拓扑分析采用的方法有深度优先搜索和广度优先搜索结合的方法[11],但该方法对环形电网的适应性并不理想。本文提出采用局部拓扑和全局拓扑结合的方法,建立单个子电站的节点邻接矩阵,再扩展为整个电网的节点邻接矩阵;为了减少存储空间和运算时间,建立了子系统节点数据表和相关支路表,通过分析和计算证明此方法表示的结构清晰,计算速度快,适合独立电网的拓扑分析。
2 独立电力系统的描述模型
独立电力系统通常要求较高的供电连续性和可靠性,因此电站间常采用环形或网形连接,负载采用辐射状供电,重要负载采用正常或备用两路供电,次要负载采用单路供电[12]。
图1为一典型的独立电力系统模型简图。建立模型的基本思想是,将变压器和负载节点看作是一个电气接点,电站也表示为一个电气接点,联络开关、自动转换开关(ABT)及手动转换开关(MBT)看作连接电气接点的支路,支路是否连通取决于开关的状态。
图1中,Gi为发电机(电站);Li为负载;Ci为配电板;l为跨接线(lij表示电站i和电站j间的跨接线);虚线表示负载的备用路径(上有自动闭合开关)。电站间以跨接线连接成环网。正常情况下,负载由母电站成辐射状供电,对网络进行重构后,可通过备用路径供电。定义各电站与其配电板下的负载组成的节点集合为子电站,即:
子电站 i={Gi,Ci,Li…| Li为挂接在电站 Gi和Ci配电板下的负载};
定义子系统为相互连通的子电站、馈线、支路、跨接线和负载等,即:
子系统={ Gi,Ci,Gj,Cj,Li…, Lj| Gi和 Gj为相互连通的子电站}。
例如在图 1 中,G1,C1,L1、L2、L3、L4、L5及相对应的节点组成子电站 1,而当所有跨接线均连通时,图1的四个子电站组成一个系统(或子系统,因电网未发生解列)。
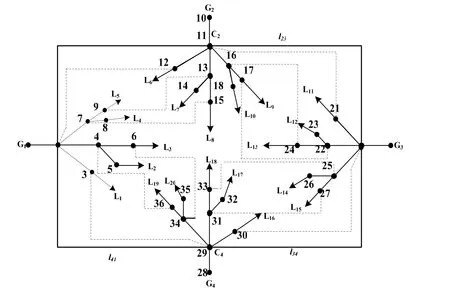
图1 独立系统的符号示意描述简图
3 局部拓扑和全局拓扑分析
节点导纳矩阵集中了网络的支路特性约束和拓扑约束的全部信息[13]。与节点导纳矩阵对应的节点关联矩阵(节电邻接矩阵)也包含了网络拓扑约束的全部信息,因此采用邻接矩阵可以方便地对电网拓扑进行分析。但当节点数目庞大时,对邻接矩阵的计算将会占用大量时间并占用较多存储空间。对于图1表示的独立电网,即使电站和节点数目较多时,各子电站下的负载数目却不会任意增加(为保证电网的供电可靠性),基本保持在较少的数目,各子电站拓扑分析的时间较小。因此,本文提出对各子电站采用邻接矩阵法进行局部拓扑分析,再结合跨接线状态和电站的状态进行全局分析。这样可以将原先对整个电网复杂耗时的拓扑分析转化为相对简单快速的局部分析。
3.1 局部拓扑分析
在进行局部拓扑分析时,应先对节点进行编号,同时对于每个子电站及其包含的节点,应再做一次编号以进行子系统内的拓扑分析。建立各子电站的邻接矩阵后,电网拓扑结构的变化(故障导致的支路失电、断路、系统的解列等)都可以在各邻接矩阵中实时的反映出来。
图2是图1中单个电站的符号示意图。
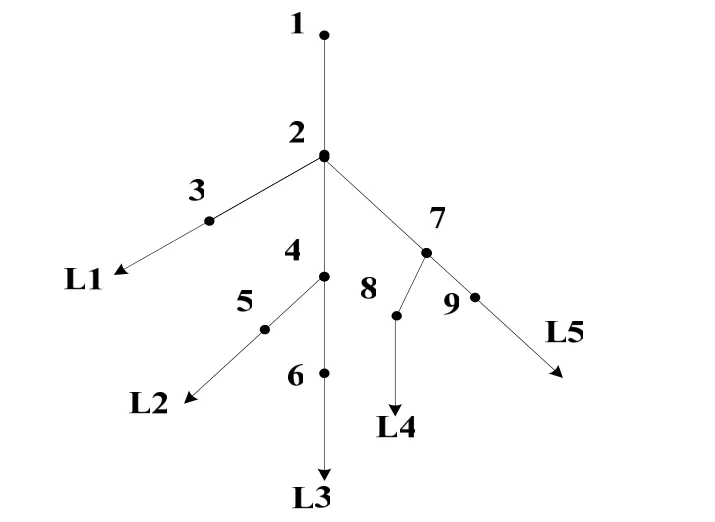
图2 电站1的节点示意图
由图论的基础知识可知,图2中各节点之间关系可用邻接矩阵A1=(aij)的方阵表示。其中

与图2相对应的邻接矩阵如下:
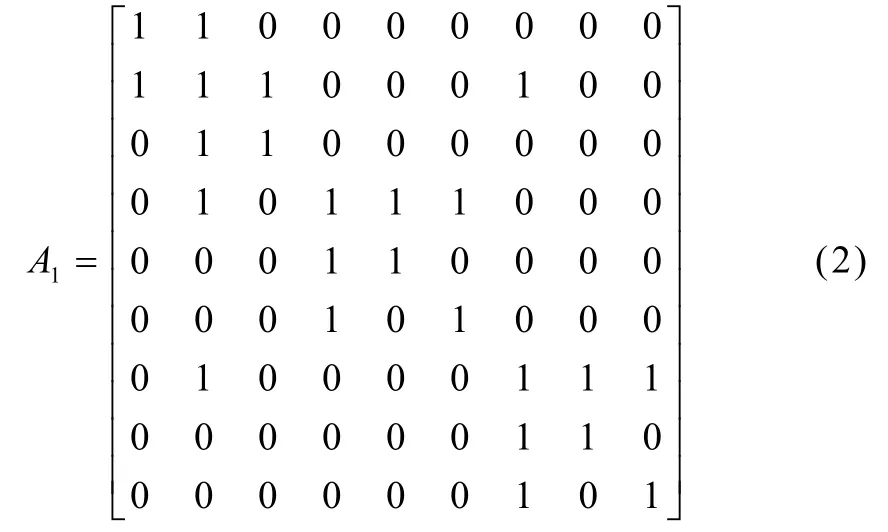
假如在节点2和4之间发生故障,导致2-4之间的支路断开,需要修改邻接矩阵:(A1)24=0,(A1)42=0。为了判断2-4支路断开对其他节点、支路造成的影响,需要判断子电站1中各负载节点与电源节点之间的连通性。通过节点邻接矩阵A1的(m-1)次逻辑自乘(m为电站及负载节点的数目,此处为m=9)即可得到此子电站的(m-1)级连通性,与电源节点不连通的节点及其负载均失电。失电的节点由于不包括在拓扑分析后的计算中,应消去。在节点邻接矩阵中消去失电节点和修改相关的邻接元素得到故障后的节点邻接矩阵A1’,以A1’为基础可进行全局拓扑分析。
为了实时的反映支路变化的情况,可以建立各支路和对应的两端节点及支路所属的子电站的文件,其表示方法如表1所示。
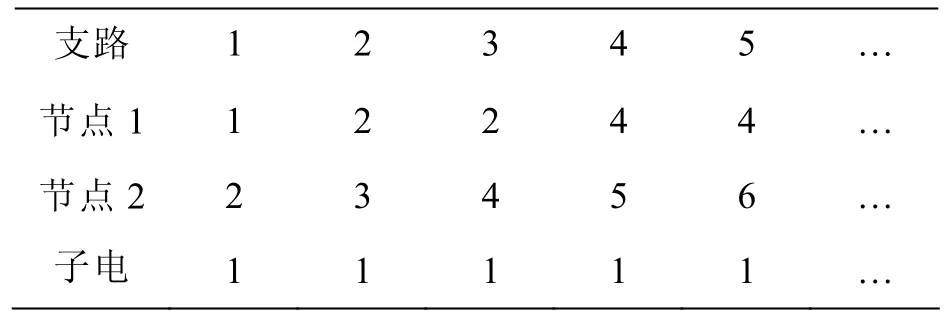
表1 支路的表示和存储方法
当需要判断某支路的通断性时,只需在其所属的子电站的邻通性矩阵中找到所对应的两节点间连通性即可(跨接线除外)。
对于其余子电站系统可用相同的方法建立各自的邻接矩阵,实时反映拓扑的变化。
3.2 全局拓扑分析
对于复杂、多电站的独立电力系统,可以方便地在单个电站的节点邻接矩阵的基础上进行扩展。以图1所示的4电站的电力系统为例,其整个系统的节点邻接矩阵可表示如下:
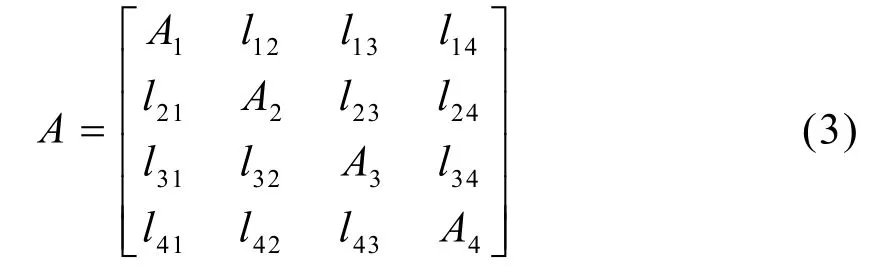
式(3)中 A1、A2、A3、A4表示各子电站的节点邻接矩阵,lij表示为各子电站间跨接线的状态,如l12表示子电站1和子电站2 之间的跨接线的状态,也即节点2与节点11间的支路的通断状态,其余类似。
判断整个电网的全局连通性时,一般需要将A作(n-1)次逻辑自乘,n为电网的节点总数。对图1的独立电网需要将36阶的邻接矩阵作35次自乘,如果节点数目庞大,则将非常耗时,因此,可以采用通过电站间的连通性来判断任意两个节点的连通性,以节点 6和节点 15为例,节电 6属于子电站1,对A1作8次逻辑自乘即可得到节点6与节点2间的8级连通性,同样对A2自乘也可得到节点15与节点11间的连通性,再考虑节电2与节点11间跨接线的状态(即l12+l23*l34*l41是否为1),即可得到节点6与节点15间的连通性。实际上在计算全局邻接矩阵的连通性时不需要对所有节点逐个计算,因为纳入计算的节点必然属于某个确定的子电站中,只需判断子电站间的连通性即可得到所有节点的连通性。同时,基于可靠性的考虑,独立电力系统通常采用多电站供电,每个电站下所带负载不会很多(这样可以防止单个电站故障导致多个负载失电情况的发生),因此单个电站通过逻辑自乘得到连通性所需时间很短,形成整个电网的连通性矩阵 A′ 需要的时间也较短。
以图1的系统为例,如果对整个电网建立N(=36)阶邻接矩阵 A,判断其连通性需要做35次逻辑自乘,运算量为N3(N-1)=363*(35)=1632960次乘法运算,采用本文提出的局部拓扑和全局拓扑结合的方法,最大运算次数约为 93*(8)*4=23328次乘法运算。可见运算量明显减少。并且从图 1中可以看出,每个子电站中电站节点到任意另一节点的连通性并不需要将Ai做8次自乘,例如节点1与节点6的连通性只需要将A1做3次自乘即可。所以,可以事先判断子电站计算需要的自乘次数来减少不必要的运算。
4 子系统的形成和数据的优化存储
通过 3.2的全局拓扑分析,可以得到整个电网的邻接矩阵,以此为基础可以进行子系统的判断和故障的跟踪,但是当节点和支路数目大量增加时,整个系统的邻接矩阵会占用较多的存储空间,且调用邻接矩阵的数据也较繁琐,运算速度也会受到很大影响。为了压缩数据存储空间和进一步提高运算速度,可以改进将整个系统的存储改进为对子系统的存储和调用。
4.1 子系统的形成
系统的邻接矩阵中任意两节点的连通关系可以分类为:
(1)相同子电站中节点之间的连通关系,如两节点间有支路直接连接,可通过子系统的邻接矩阵判断;否则可通过子系统邻接矩阵的逻辑自乘得到的连通性矩阵进行判断;
(2)不同子电站间节点的连通关系需要通过3.2节得到的全局连通性矩阵来判断,或判断两节点所属的电站间的连通性。
因此,在得到各子电站的邻接矩阵后,可以建立各子电站的节点数据表和包含的对应支路,来确定各子电站的节点和支路的状态。需要判断不同子电站的节点间的连通性时,只需判断子电站间的连通状态。如果节点均属于同一子系统,则两节点间必然是连通的,因此首先需要进行子系统的判断(是否解列)和形成。
对于本文给出的环形电网,当 n(n>=2)条以上跨接线断开时,系统解列为n个子系统,这很容易从环形网的形状上看出。由于所有负载均包含在某一确定的电站下,因此可通过判断电站之间的连通性来确定子系统。方法是:任取一个电站为初始点,按一定的方向(顺时针或逆时针)搜索与其连通的电站(依据相互之间的跨接线通断性),如果连通则属于同一子系统,与其连通的子电站节点业属于此系统,将搜索过的电站和其节点作标记,当遇到不连通的跨接线时,将遇到的电站作为第二个子系统的第一个电站,再次搜索第二个子系统直至所有子系统的电站搜索结束。
4.2 数据的优化存储表示
用节点数据表表示子系统的节点时,前k位(这里k表示电网包含电站的总数)存储的是子系统包含的电站,k+1位后存储的是子系统中包含的负载节点。如果电网发生解列,可知,各子系统间是不连通的。
以图1的电网为例,若跨接线l23、l41断开,则系统解列为两个子系统,其包含的电站分别为G1,G2和G3,G4,两个子系统间不连通。对应子系统的节点数据表存储格式如表2所示。
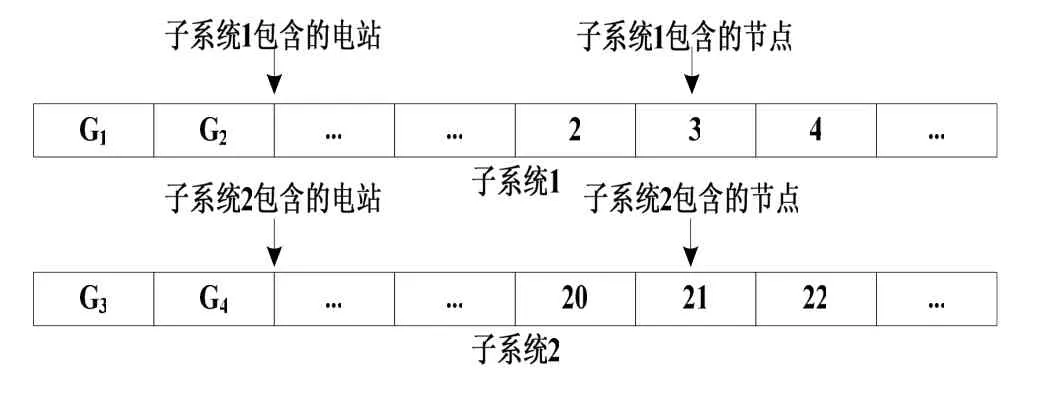
表2 子系统节点数据表的表示和存储方法
通过建立子系统的节点数据表,避免了节点数过多时全局邻接矩阵表达和存储的复杂性问题,可以实时、直观的表示电网的拓扑结构。为了直观地验证上述方法的有效性,下面通过算法1(采用整个电网的关联矩阵表示法)和算法2(本文采用的局部关联矩阵表示法和节点数据表)的连通性判断时间来验证本文方法的有效性。试算是在图 1的系统和扩展的节点数为 144、支路数为152的系统上进行的,使用CPU为Athlon2500、内存为512M的计算机。表3给出了算法对比性试算结果。
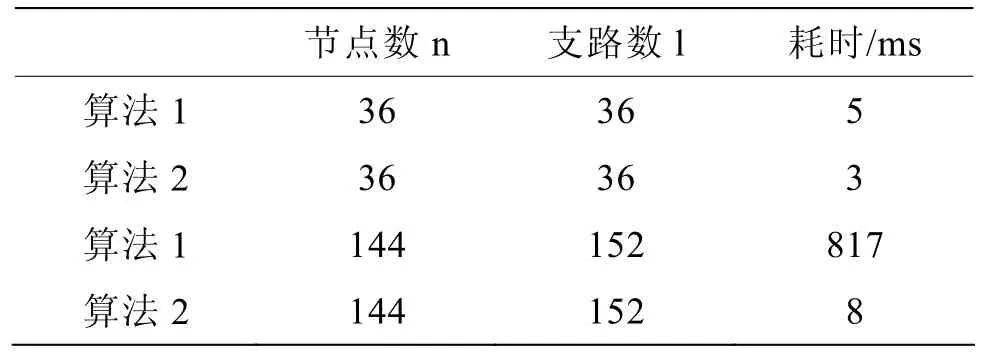
表3 算法对比性试算结果
可以看出采取局部关联矩阵和子系统节点数据表等方法后,计算整个电网的连通性所需要的时间大大减少,而且随着节点的增加,其计算时间应成线形增长,较之算法1更加优越。
因此,运用邻接矩阵可以方便地表达出网络的拓扑结构,避免了大量繁琐的搜索,运用子系统节点数据表可以压缩存储空间,进一步提高运算速度,便于对独立电网的故障和其他异常情况下节点的重新优化排序和重新因子化。
5 结束语
本文在对独立电网的拓扑结构研究的基础上,建立了独立电网的描述模型,并根据独立电网的实际特性,提出了基于节点邻接矩阵的局部拓扑分析和全局拓扑分析方法,建立子系统的节点数据存储表,计算结果表明此方法计算速度较快,占用存储空间的情况得到改善,为独立电网的网络拓扑分析和故障后重构等提供了一个有效的分析方法。
[1]M.Prais and A.Rose.A Topology Processor That Tracks Network Modifications Over Time [J]. IEEE Transaction on Power Apparatus and Systems,1988,3(3):992-998.
[2]于尔铿.电力系统状态估计[M]. 北京:水利水电出版社,1985:165-180.
[3]吴文传,张伯明.基于图形数据库的网络拓扑及其应用[J].电网技术,2002,26(2):14-18.
[4]G.A.dgar. Measure, Topology and Fractal Geometry[M].New York:Springer,1990.
[5]王湘中,黎晓兰.关联矩阵的电网拓扑辨识[J].电网技术,2001,25(2):10-16.
[6]储俊杰.变电所一次主接线电气连通性分析的数学模型[J].电力系统自动化,2003,27(1):31-33.
[7]万华,李乃湖,唐国庆.基于广度优先的快速拓扑分析法[J].电力系统及其自动化学报,1995,7(2):18-23.
[8]韩肖宁,于辉.面向对象的电力系统网络拓扑分析的研究[J].电力学报,2006,21(1):14-19.
[9]陈惠开[美]. 应用图论-图与电网络[M].北京:人民邮电出版社,1990.
[10]竺 炜,穆大庆.电力网络实时拓扑分析的两种算法的实现[J].长沙电力学院学报(自然科学版),2001,16(2):24-25.
[11]杨秀霞. 独立电力网络拓扑分析方法及其在故障恢复中的应用[J]. 电力自动化设备, 2005, 25(5):10-14.
[12]李红江,鲁宗相,王淼等. 基于可靠性模型的船舶电网拓扑结构对比分析[J]. 电工技术学报,2006.11,21(11):47-52.
[13]张伯明,陈寿孙. 高等电力网络分析[M]. 北京:清华大学出版社,1999.