罗兰C TOA-ASF测量系统设计与实现
2010-06-05高立李文魁陈永冰
高立 李文魁 陈永冰
(海军工程大学电气与信息工程学院,武汉 430033)
罗兰C系统采用100 kHz低频波段,电波传播具有绕射能力强、传播距离远、不易受干扰的优点。影响罗兰C定位误差的因素包括:主副台同步误差、接收机测量误差和电波传播误差。其中前两项的数值均可控制在0.1 μs量级。由于海水表面的电波传播时延可以准确计算,因此电波传播误差实际就是由于电波在陆地上传播而产生的时延,即二次相位因子ASF。大多数罗兰C导航台深入内陆,ASF最大可达7微秒(对应定位误差2100 m)。ASF是目前制约罗兰C定位和授时精度的主要因素[1]。
按罗兰C测量参数为时差还是伪距,ASF可分为时差 ASF(TD-ASF)和到达时间ASF(TOA-ASF)。TD-ASF修正只能用于导航,而TOA-ASF修正可同时满足长波导航和授时的需要。目前TOA-ASF修正是当前和未来提高罗兰C性能的核心工作。
1 测量原理
1.1 系统组成
如图 1所示,TOA-ASF测量系统由授时型GPS接收机、罗兰C接收机、计数器以及数据采集软件构成。GPS用于提供当前时间、位置以及与 UTC时间绝对同步的 1PPS 秒脉冲。其RS232C串口输出NMEA 0183格式的导航定位数据。罗兰 C采用 SATEMATE1030接收机,有RS232C串口输出和 1PPS/Timing输出,罗兰 C通过串口和计算机进行通信,通过PPS/Timing口用Timing输出PCI信号传给计数器。计数器通道1输入GPS的PPS信号,通道2输入罗兰C的PCI信号,GPS信号开门,罗兰C信号关门,计数器测量两者的时间差。
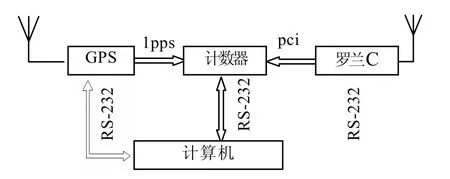
图1 系统构成框图
1.2 TOA-ASF测量原理
TOA-ASF测量的基本原理为GPS共视法。罗兰 C信号的周期(PCI或 GRI)和 UTC秒信号(1pps)不是等周期信号,罗兰 C信号的 CTR与UTC秒信号只在特定的秒上才是重合的,与罗兰C信号 CTR 重合的 UTC秒为“符合时间(TOC)秒”。非TOC秒与其后续最近出现的CTR之间的间隔为非TOC秒偏差(UNTOC)[2]。
用时间间隔计数器测量GPS的1PPS与长波接收机PCI时间差,即总时延T。如图2所示,总时延组成为:

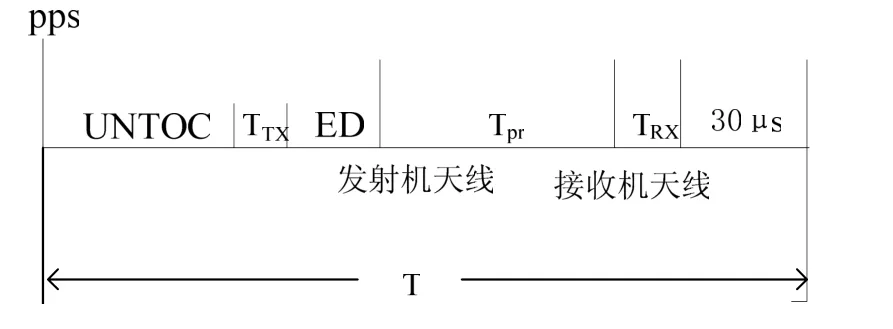
图2 时延修正示意图
图中:UNTOC为非 TOC秒偏差;TTX为发射台同步误差;ED为发射延迟;Tpr为电波传播延迟;TRX为测量系统延迟;30 μs为接收机跟踪第3周末跟踪点的周期修正量。电波传播延迟

其中,PF为一次相位因子,SF为二次相位因子。
由式(1)、(2)可得ASF计算式

上式中,UNTOC可查表或计算得到;TTX由发射台实时监测得到;发射延迟ED为已知固定值;接收系统延迟 TRX可实测得到;在已知测点位置的前提下,PF+SF值可准确计算。
采用一个固定测试点和一个移动测试点同步测量[3],固定测试点在距离发射台附近(<30 km)。T1和 T2分别为固定测试点和移动测试点测量的总时延,分别为:

对于固定测试点,其到罗兰-C发射台距离很近,SF1、ASF1可忽略。固定测试点和移动测试点以 GPS(1pps)作为基准,则固定测试点和移动测试点的接收时差为△T= T2- T1。因此动点的ASF为

T2、T1、TRX2、TRX1可实测得到, PF1、PF2及PF2可分别计算得到。
2 系统设计
2.1 组成仪器及设置
2.1.1 M12MT授时型摩托罗拉GPS接收机
M12MT GPS接收机能同时锁定12颗在线GPS卫星,其定位精度为10 m(2σ),授时精度为20 ns(6σ)。其输出的位置和UTC时间及1 PPS作为罗兰C TOA-ASF测量的参考基准。
GPS串口输出波特率采用默认值4800。选择RMC格式数据,获得GPS定位时间、经纬度及航迹向、对地速度、定位状态等数据。
目前,没有专家给“微时代”下一个准确的概念,但有不少专家学者从各个不同的角度探讨和研究了“微时代”。他们认为微时代是以移动互联网为载体,依靠智能手机、平板电脑等便携式移动终端为核心媒介,以微博、微信等应用软件为基本载体,以互动性、即时性、碎片化为主要特征,以做课件、做电影、做小说、做公益等为表现形式的新传播时代。
2.1.2 Locus SateMate1030接收机
该接收机能同时接收多达 40个发射台的信号,信噪比较传统接收机至少提高了20 dB,保证了试验数据的完备性。该接收机能输出伪TOA、场强、信噪比、包周差、位置等参数。本实验中两台Locus接收机分别采用电天线和磁天线,有利于比较电天线和磁天线的性能。
SateMate1030接收机采集数据前要设定通信协议,即B38400,8,n,1。需要输出场强、包周差、信噪比等要输入指令为“formate nav 1”。采用“pll台站码”命令对台站信号进行锁定。锁定新的台站前必须先对前一台站解锁,指令为 pll off。1PPS/Timing默认的输出是PPS信号,需输入指令加以控制,让其选择Timing输出,对需要测量的台站要指定,其指令为stp pci +发射台,换台时要先进行解除指定的台站,其指令为stp off。
2.1.3 时间间隔计数器
试验中采用Aglient 53131A测量电天线1030罗兰C接收机 PCI与GPS 1PPS的时间间隔,采用SP3386计数器测量磁天线1030罗兰C接收机 PCI与GPS 1PPS的时间间隔。
(1)Aglient 53131A。每次开始使用时先按下Recall键,计数器的 RS232C串口即可连续输出测量数据。按Freq&Ratio键,检查通道1的GPS 1pps的频率是否为1 Hz,检查通道2的1030 1 pps的频率是否为100 kHz,否则调整DC。稳定后按Time&Period键则可测量罗兰C PCI相对GPS 1 pps的时间间隔。
(2)SP3386计数器。同上,调整通道1和通道2的频率为1 Hz和100 kHz。按下时间/周期键测量时间间隔。与53131A不同,SP3386计数器无Recall键,默认状态下串口不输出数据,通过RS232串口向计数器发送连续测量指令,即“init:cont 1 ”即可。若计数器不响应时,重新开机即可。
2.2 仪器标定
2.2.1 GPS定位误差/定时(1pps)标定测量
1) 在已知位置(比GPS机定位精度高1个或半个量级)点上,同时将实验用的2个GPS机进行定位测量,其绝对或相对定位误差小于10 m。
2) 在任意可重复测量点,同时将 2台 GPS进行定位测量,其相对定位误差小于10 m。
3) 用时间间隔计数器比对GPS的1pps信号的前沿的相对偏差,单次测量1 min,不小于30次,统计测量结果用于精密改正不同接收机系统偏差。
2.2.2 罗兰C接收机通道时间延迟比对测量
在上述测量GPS同时,用时间间隔计数器,比对测量带有1 pps输出的罗兰C接收机1pps信号相对于GPS机1pps的时间间隔偏差;不同接收机在同一地点测量的数值会有所不同;单次测量一次1 min,不小于30次,统计测量结果用于精密改正不同罗兰C接收机测量的系统差。
2.2.3 时间间隔计数器测量通道时间延迟比对测量
用两个计数器分别测量同一GPS的1 pps,统计计数器测量误差。单次测量 1 min,不小于30次。
2.3 测量软件
测量系统软件采用Borland C++ Builder5开发ASF采集处理数据库软件。主界面如图3所示。该软件同步完成数据采集和 ASF计算。该 ASF是包含了ASF、发射同步误差及测量系统时延等在内的时延量,这里称作粗ASFC。在此基础上,去掉发射同步误差和测量系统时延,即可得到ASF。

按功能划分,该软件可划分为:数据记录处理模块、ASFC计算模块、ASFC数据库模块、实时串口数据显示、均值和方差计算模块。该系统具有以下功能:(1)实时读取串口数据;(2)设置门限值,进行数据筛选;(3)计算台对ASFC值,并写入数据库中;(4)可对数据库数据进行修改和删除;(5)数据库可按经度、纬度、ASF排序;(6)实时显示串口数据;(7)对定点 ASF测量计算均值、方差等统计量;(8)实时显示UTC时间、航迹向、对地速度等;(9)ASFC数据库输出TXT文档。
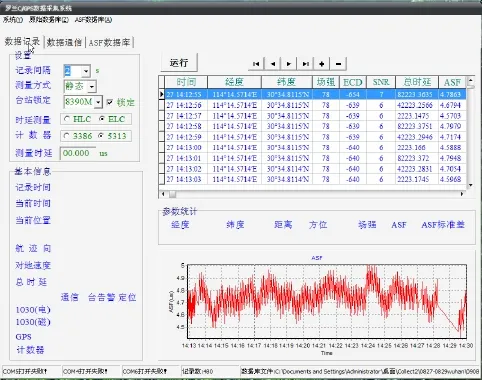
图3 TOA-ASF测量软件主界面
4 试验测量及其结论
采用该测量系统,项目组沿武汉-宣城-海盐-舟山一线,进行了大量动态和静态 TOA-ASF车载测量试验,测量宣城台(8390M)信号,分别在武汉和宣城台附近30 km处进行了标定测量。在距海岸30 km海盐开始测量,每隔5 km向海岸进行定点测量,在移动中进行车载动态测量,并且对杭州湾大桥和舟山群岛进行测量,试验中测得4万组有效数据。在杭州湾大桥、杭州湾南岸和舟山群岛海岸测量点位分布及其初步计算结果如图4~6所示。
实测数据的初步处理表明,实测 TOA-ASF均在合理范围内(1~3 μs),采用Millington方法进行理论预测和实测的TOA-ASF误差小于20% s,说明该测量系统的设计是成功的,能够满足ASF实测的需要。
[1]李文魁, 陈永冰, 周永余等. 基于 GPS的罗兰 C附加二次相位因子修正算法[J]. 声学与电子工程,2003(1):35 39.
[2]戴琰. 长河二号系统建立绝对时间同步的原理和方法. 2005年全国时间频率学术交流会.2005,11.
[3]李海奇, 马松涛, 王仕成. 罗兰-C ASF修正方法研究[D]. 青岛大学学报,2005(4):47-51.
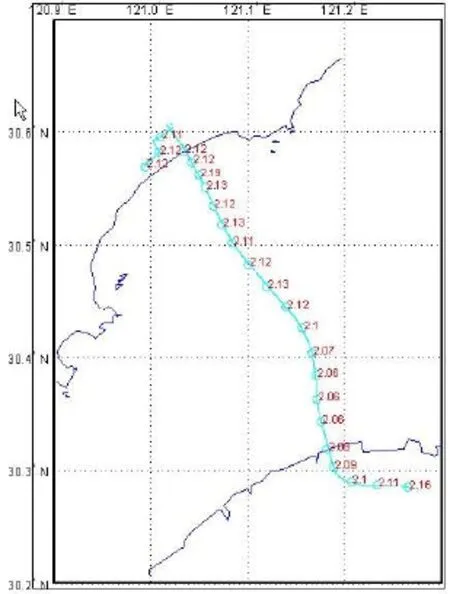
图4 杭州湾大桥测量点分布
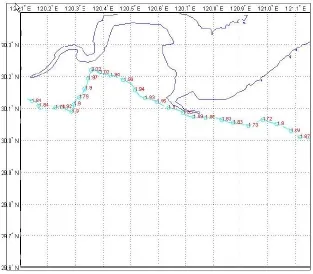
图5 杭州湾南部海岸测量点位分布
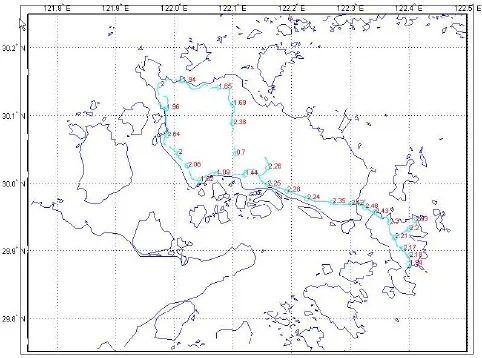
图6 舟山群岛海岸测量点位分布