基于虚拟现实的MOTOMANHP3型机器人运动学仿真
2010-05-31战晓磊辛洪兵汉斯彼德兰特斯
战晓磊 辛洪兵 汉斯·彼德 兰特斯
1.机械科学研究总院,北京,100083 2.北京工商大学,北京,100037 3.弗劳恩霍夫工业经济与组织研究所,斯图加特,70569
0 引言
机器人技术在工业、国防、空间探测和海洋开发中的重要地位使各国对机器人的研究均十分重视,但是因科学技术水平的限制,全自主的智能机器人系统在短期内难以实现,因此目前遥操作机器人具有极大的研究价值。国外在遥操作机器人方面进行了很多研究,如澳大利亚Western大学研制的6个自由度的工业机器人Australias Telerobot、美国Carnegie Mellon大学研制开发的通过Web控制的移动机器人Xavier,都实现了基于Internet技术的远程控制[1],哈尔滨工业大学也建立了基于Web的遥操作机器人系统[2],但在实际应用中由于Internet的不可预测时滞及有限的通讯带宽,导致Internet遥操作机器人系统存在网络传输时延问题,使操作人员无法流畅操作。
虚拟现实技术采用了先进的计算机技术和图形处理技术,在虚拟装配、虚拟制造、虚拟样机等机械领域已经获得了阶段性成果[3],相对于基于Internet技术的遥操作机器人需要通过网络传输大量的图像和数据文件,应用虚拟现实技术只需要传输很少的数据文件,这为解决遥操作机器人中的网络传输时延问题提供了一种新的方法。本文研究了虚拟现实技术在遥操作机器人中的应用方式,构建了一个基于虚拟现实技术的遥操作机器人运动学仿真系统。
1 系统设计思想
首钢莫托曼MOTOMAN-HP3型六轴工业机器人可以分解成底座、S轴、L轴、U轴、R轴、B轴、T轴,具有很快的轴动作速度、最大的工作半径和最小的干涉半径,在系统设计上提供了较大的灵活性和广泛的应用方案。它的控制柜(NX100)运用高精度轨迹控制算法缩短了对命令响应的滞后时间。
本控制系统采用遥编程控制方式和客户端/服务器端(Client/Server)控制模式来实现,系统的总体框架见图1。
系统设计流程如下:①建立机器人的几何模型和虚拟模型,并赋予虚拟模型动态组合、动态分离及虚拟现实特性,展示出模型的组成、装配关系;②机器人运动学分析,利用D-H齐次变换矩阵,建立机器人的运动方程,求解运动学正逆解;③在MATLAB/Simulink系统下建立机器人的运动学仿真图,设计运动学正逆解模块,通过虚拟现实工具箱建立虚拟机器人的控制节点,连接外部交互设备构建机器人虚拟现实控制系统,如图2所示。

图1 虚拟现实控制系统的总体框架图

图2 机器人虚拟现实控制系统设计流程图
为了避免传输时延对操作人员造成影响,在操作过程中采用遥编程控制方式,操作人员只针对虚拟环境进行操作,虚拟环境将操作人员的行为解释为相应的任务指令,机器人根据这些指令完成具体操作,远程机器人及其工作环境不向客户端返回任何图像信息。
虚拟现实软件系统采用MATLAB下的Simulink软件包,使用标准的VRML技术,在MATLAB和Simulink环境中建立虚拟场景,通过虚拟现实工具箱连接虚拟机器人及外部交互设备,实现操作人员与虚拟现实环境的交互操作。为了使机器人的虚拟模型与远程机器人具有同样的运动轨迹,需要进行机器人运动学分析。通信部分负责客户端与服务器端之间的数据通信,将由上一级获得的任务指令进行解码并编码发送到下一级。
系统采用分布式架构,每一个功能都有相对的应用服务器进行控制,这样,使得机器人功能的扩张更为方便,并且提高了整体的运行效率。
2 机器人模型的建立
虚拟现实技术下的机器人需要建立几何模型和虚拟模型,本研究通过Solidworks软件建立机器人的三维模型,利用Solidworks的VRML转换程序输出为VRML文件,实现机器人的虚拟模型,如图3所示[4]。

图3 机器人的虚拟模型
在虚拟模型的构建中,使用VrmlPad2.1软件编辑模型文件。通过增加Transform节点实现实体模型的导入,同时,在Transform节点下内置一个坐标系,所有子节点都建立在它的坐标系原点处,构成节点逐层嵌套包含结构,这样,运动就可以通过Transform节点传递下去。Tranform结构图如图4所示。

图4 Transform结构图
3 机器人运动学分析
3.1 正向运动学求解
MOTOMAN-HP3型机器人具有6个自由度,各关节均为旋转关节,为分析其运动学问题,结合机器人的具体结构,建立机器人D-H坐标系,如图5所示,表1中列出的是根据建立好的坐标系得到的D-H参数dn、αn、an、θn(n=1,2,…,6)的值。
按D-H法确定杆件坐标系,取坐标系n的z轴与关节n+1的轴线重合,x轴取为相邻z轴的公垂线,y轴则按右手法则确定。任何一个连杆n,两端有关节n和n+1,两个关节轴线沿公垂线的距离an为连杆长度,αn是在垂直an的平面内两个轴线的夹角,即连杆扭角,dn是沿关节n轴线的两个公垂线的距离,θn是垂直于关节n轴线的平面内两公垂线的夹角[5]。
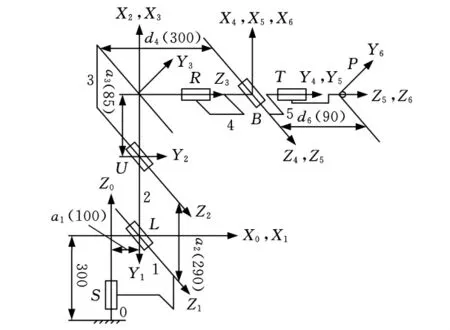
图5 MOTOMAN-HP3型机器人坐标与参数

表1 MOTOMAN-HP3型机器人坐标参数
根据表1中所给的连杆参数以及坐标系建立结果,可得连杆变换矩阵:An=R(z,θn)T(0,0,dn)T(an,0,0)R(x,αn)

将表1中的参数代入式(1)中可得相邻坐标系之间的位姿变换矩阵则机器人的末端位姿为

式中,si表示sinθi;ci表示cosθi;(px,py,pz)为机器人末端位置坐标。
结合机器人D-H参数,把已知的机器人的各关节角度代入式(2)就可求出机器人的运动学正解。
3.2 逆向运动学求解
目前,机器人的逆向运动学求解方法很多,如解析法、迭代法等[6-8],本文根据机器人的位置结构和姿态结构的特点,引用一种避免大量逆矩阵相乘的方法[9],即用左乘式(2),用右乘式(2),得

根据An矩阵的逆矩阵公式可得各个变换矩阵的逆矩阵,有


采用同样的方法,可以分别求出θ2、θ3、θ4、θ5、θ6。
4 基于虚拟现实的运动学仿真系统的实现
令式(3)左右两边元素(3,4)相等(其中(3,4)表示该矩阵的第三行第四列元素),可求得
在 MATLAB/Simulink系统提供的虚拟现实环境下,通过虚拟现实工具箱加载 MOTOMAN-HP3型机器人虚拟模型中S、L、U、R、B、T6个轴的Rotation节点,建立虚拟机器人的控制节点,这样就实现了虚拟场景的导入。接着,利用工具箱与交互设备的链接模块实现操作人员与虚拟环境的交互操作,Simulink模块驱动虚拟场景。同时,编程设计客户端与服务器端之间的通信协议,解决传输数据的解码编码问题,实现虚拟场景与远程机器人的数据通信,进而实现基于虚拟现实的机器人运动学仿真系统。
在Simulink模块的设计中,根据机器人运动学编制运动学正解和逆解仿真模块,操作人员通过交互设备指定机器人末端位置坐标(px,py,pz),经过运动学逆解模块计算得到机器人S轴、L轴、U轴、R轴、B轴、T轴的运转角度θ1~θ6,这些角度数值以.mat文件格式经过通信协议发送到机器人控制柜。当机器人运转到指定位置后,S轴、L轴、U 轴、R轴、B轴、T轴的实际运转角度数据将回馈到虚拟现实系统中,通过运动学正解模块计算,对虚拟机器人的位姿进行对比校正。
5 总结
(1)采用Solidworks-VRML的建模方法建立了机器人的虚拟模型,并利用D-H齐次变换矩阵,针对MOTOMAN-HP3型机器人建立了运动学运动方程,求解出运动学正逆解。
(2)在 MATLAB/Simulink系统下搭建了虚拟现实仿真平台,设计了基于客户端/服务器端的分布式网络控制结构,通过虚拟现实工具箱及通信协议,实现了虚拟现实控制系统的各个功能。为基于虚拟现实平台的遥操作机器人控制系统的应用及进一步研究打下了基础。
[1] 于涛.具有力觉反馈的遥操作机器人研究[D].长春:吉林大学,2005.
[2] 樊滨温,张火同,吕伟新,等.遥操作空间机器人系统研究[J].哈尔滨工业大学学报,1999,31(1):111-113.
[3] 郑太雄.虚拟装配理论与方法研究[D].重庆:重庆大学,2003.
[4] 战晓磊.基于虚拟现实技术的遥操作机器人协调控制系统研究[D].北京:北京工商大学,2008.
[5] 石炜.MOTOMAN-UP6机器人动力学分析[D].北京:北京科技大学,2003.
[6] Manocha D,Canny J F.Efficient Inverse Kinematics for General6RManipulators[J].IEEE Transactions on Robotics and Automation,1994,10(5):648-657.
[7] Paul R P,Shimano B E,Mayer G.Kinematics Control Equations for Simple Manipulators[J].IEEE Trans.SMC,1981,11(6):449-455.
[8] Fu K S,Gonzalez R C,Lee C G S.Robotics:Control,Sensing,Vision and Intelligence[M].New York:McGraw-Hill,1987.
[9] 陈平.MOTOMAN-UPJ型机器人运动学研究[D].镇江:江苏大学,2006.
