激光驾束观瞄制导仪参数检测系统
2010-05-11李娜,王红
李 娜,王 红
(1.中国科学院长春光学精密机械与物理研究所,光学系统先进制造技术中国科学院重点实验室,吉林 长春 130033;2.中国科学院研究生院,北京 100039)
激光驾束观瞄制导仪参数检测系统
李 娜1,2,王 红1
(1.中国科学院长春光学精密机械与物理研究所,光学系统先进制造技术中国科学院重点实验室,吉林 长春 130033;2.中国科学院研究生院,北京 100039)
为使激光驾束观瞄制导仪各项性能参数能够在室内完成全面检测,提出了一种参数检测系统的设计方案。对参数检测系统的各组成部分分别进行了论述。该系统可检测固定焦距的激光通道与瞄准通道两轴线平行度、典型位置的输出特性、全程变焦过程中激光轴相对于瞄准轴的最大失调量,并可运用CCD图像处理技术检测激光信息场辐照度的均匀性等,具有结构简单,操作方便、检测精度高等优点。模拟试验表明,该设计方案能够满足工程中实际检测的要求。
激光驾束观瞄制导仪;性能参数;检测
1 引言
激光制导技术是继电视、雷达、红外制导之后的又一类制导方式。激光驾束制导是激光制导中的一种指令制导方式,具有制导精度高、隐蔽性好、适应性强、制导设备轻等特点,在中、短程导弹中得到了广泛的应用。激光驾束观瞄制导仪主要由瞄准通道和激光通道两部分组成。首先操作手通过瞄准通道手动捕获、瞄准并跟踪目标,激光通道发射已调制的激光编码信号,形成供导弹识别坐标位置的空间信息场。位于弹尾的激光接收机接收导弹所在位置的信息场信息,经电路处理后,控制导弹沿激光信息场中心飞行,直至命中目标。因此,激光驾束观瞄制导仪的有效工作需控制瞄准通道和激光通道两轴平行,并实时输出导弹在空间信息场的位置信息,且信息场内的辐照度具有较高的均匀性,才能保证导弹在信息场任何位置都可接收到激光能量,确保导弹不会失控。激光驾束观瞄制导仪参数检测系统的主要作用是对观瞄制导仪的以上各性能参数进行测试,确定各部分工作正常,技术指标满足设计要求。
2 主要测试项目
本系统的主要测试项目有:
(1)检测长焦距时激光信息场与可见光瞄准具轴线平行度;
(2)固定焦距的激光信息场特征点位置的输出特性;
(3)全程变焦过程中激光轴相对于瞄准轴的最大失调量;
(4)运用CCD图像处理技术,检测激光信息场辐照度的均匀性。
3 参数检测系统方案设计
激光驾束观瞄制导仪参数检测系统主要由平行光管、特征孔提取机构、激光接收机、CCD摄像机、综合处理器等组成。图1为参数检测系统原理框图。观瞄制导仪瞄准(可见光)平行光管分划板的十字丝后,由激光通道发射已调制的激光束,经平行光管主镜后,通过分光棱镜分光,一路由激光接收机接收信息场功能特性,另一路由CCD摄取辐照度信息的视频图像。经综合处理器处理后可得到激光信息场典型位置的输出特性、两轴平行度、全程变焦过程中激光轴相对于瞄准轴的最大失调量和辐照度均匀性。
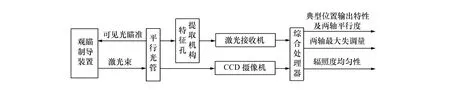
图1 参数检测系统原理框图Fig.1 Functional block diagram of parameter testing system
3.1 平行光管
系统平行光管的功能是提供观瞄通道瞄准用的无穷远目标和已调制的激光信息场。为了使可见光和激光两种波段像面齐焦,平行光管采用共轴全反射的牛顿式结构。光学系统采用了抛物面主镜,因而不产生球差。视场角较小,其成像质量能够满足测量要求。图2为平行光管的光学系统。
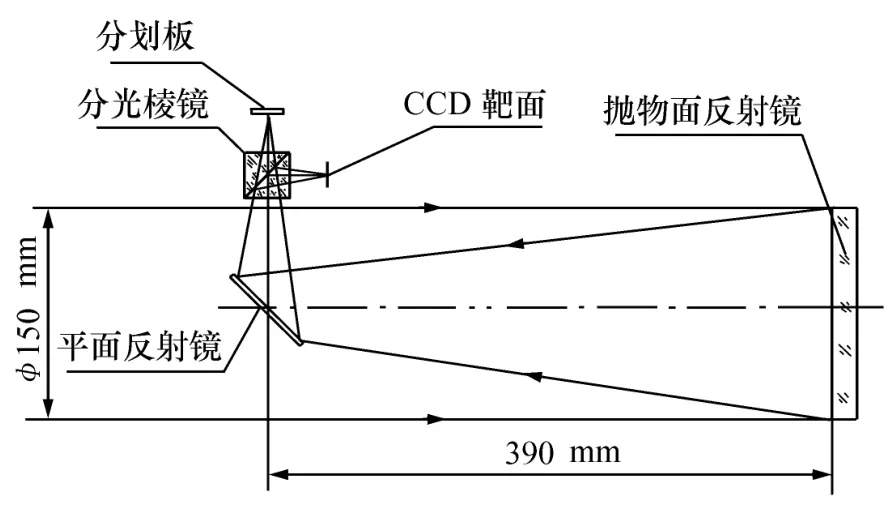
图2 平行光管光学系统Fig.2 Optical system of collimator
3.2 特征孔提取机构
特征孔提取机构由分划板、固定式金属小孔板和转动式金属小孔板组成。如图3所示,通过步进电机传动的方式带动机构旋转,实现不同位置的特征点的测量。
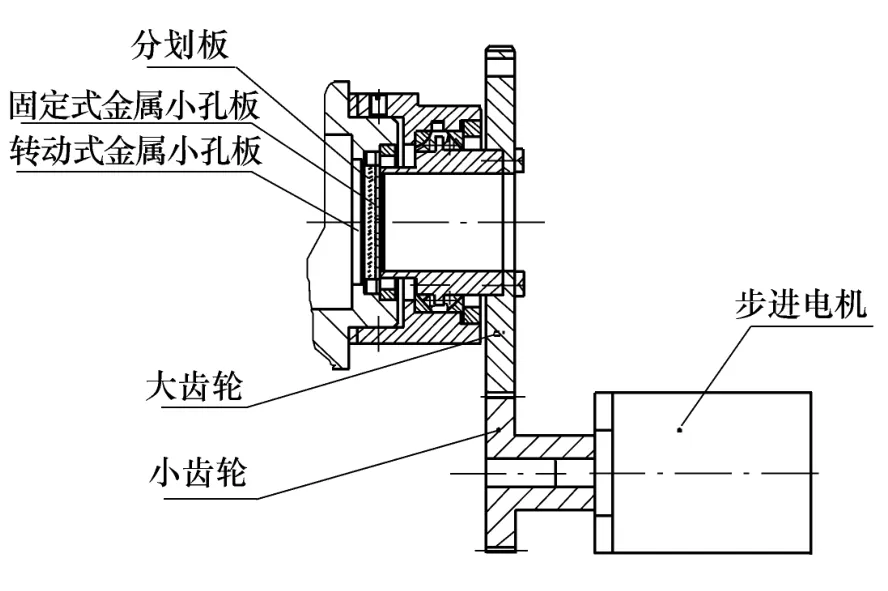
图3 特征孔提取机构Fig.3 Extraction structure of typical hole
3.2.1 分划板
图4给出了分划板的刻线型式。双夹线十字丝供观瞄通道瞄准,中心点为A,与中心孔1的圆心重合。在空间信息场上,激光通道的信息场中心轴始终位于观瞄通道的瞄准轴上方1m(称为高飞量),对应在分划板上信息场中心B点距A点的距离为h′,其它4个孔2、3、4、5的圆心位于以B点为中心,以R′为半径的圆上。
h′和半径R′由下式计算得到。
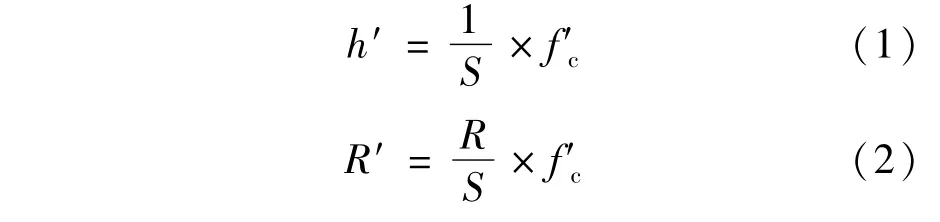
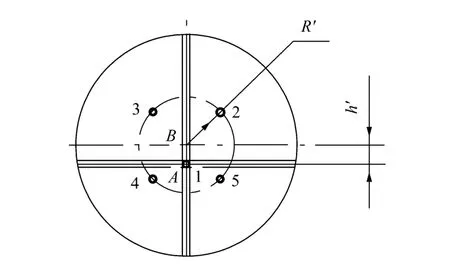
图4 分划板刻线型式Fig.4 Division of the graticule
式中,S为制导距离,R为相应距离信息场上特征点的半径。
3.2.2 固定式金属小孔板和转动式金属小孔板
固定式金属小孔板有5个小孔,与分划板的5个特征孔相对应,其作用是将分划板除特征孔外的背景全部遮挡,如图5所示。
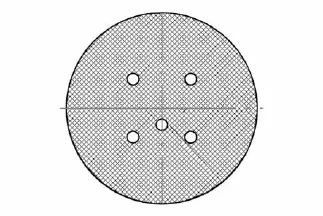
图5 固定式金属小孔板Fig.5 Fixed metallic pore plate
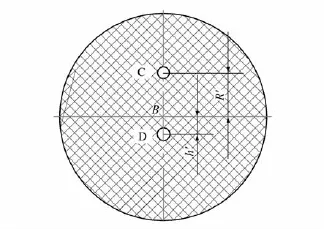
图6 转动式金属小孔板Fig.6 Rotary metallic pore plate
图6给出了转动式金属小孔板。转动式金属小孔板上只有两个小孔,孔中心为C点和D点,与信息场中心B点距离仍为h′和R′。通过步进电机,齿轮传动副驱动小孔板绕B点旋转,依次提取分划板上特征孔中心孔1或孔2、3、4、5中的一个孔的指令值,来检测输出特性;由中心孔1的输出特性来判断瞄准通道和激光通道的两轴平行度并通过全程变焦测得两轴的最大失调量。
3.3 激光接收机
激光接收机的作用是接收激光编码信号,信号经处理后输出信息场的指令特性值。激光接收机的结构组成如图7所示。激光通道的变焦距从短焦到长焦,平行光管焦面上激光信息场的光斑直径变化很大,根据接收机的分辨率和灵敏度,需恰当选择分划板特征孔的直径,合理地选择接收机工作点,以满足动态范围。
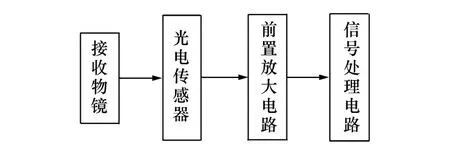
图7 激光接收机的结构组成图Fig.7 Composition diagram of laser receiver
3.4 CCD摄像机
用CCD摄像机摄取观瞄制导仪特定焦距的激光光斑图像,再由综合处理器输出辐照度均匀性。采用摄像机,靶面尺寸为8.8mm×6.6mm。为能在信息场上直径为φ的范围内测试辐照度均匀性,最小的制导距离应以靶面的短边长度6.6mm计算。

式中f′c为平行光管焦距。
因此,用CCD摄像机测量辐照度均匀性,要变焦到制导距离大于Smin所对应的焦距。
3.5 综合处理器
综合处理器的功能是根据激光接收机输出的信号值,计算处理出激光信息场的典型位置的输出特性、两轴平行度、全程变焦过程中激光轴相对于瞄准轴的最大失调量。根据CCD输出的视频信号,处理判断信息场内辐照度均匀性是否符合要求。
4 功能检测的计算
功能检测包括激光轴与瞄准轴的两轴平行性、典型位置的特性指令和全程变焦过程中激光轴相对于瞄准轴的最大失调量。
检验人员首先由观瞄准通道瞄准平行光管分划板的双十字线,激光通道变焦到制导距离2 000m所对应的焦距并发射激光,使转动式金属小孔板孔D与分划板上中心孔重合,接收机便可测出中心孔1的指令值。若两轴平行,测得归一化指令值z向为0,y向为C。若两轴不平行,设测得归一化指令值分别为Hz和Hy。r为空间信息场线性区的半径,对应的归一化指令H=1。两轴平行性在z向和y向的偏差量按下式进行计算。

两轴不平行性的线量值为:

对应距离S时,其角量值为

在此状态下将观瞄制导仪进行全程变焦即可检测出激光轴与瞄准轴的最大失调量。
在检测两轴平行性的基础上,将观瞄制导仪变焦到固定焦距,控制步进电机驱动转动式金属小孔板旋转,接收机便可依次检测出信息场典型位置的指令值。
5 结论
本文所给出的方案为激光驾束观瞄制导仪性能参数的室内检测开拓了新的思路和途径。该系统在以下3方面不同于以往的设计:(1)平行光管采用共轴全反射的牛顿式结构,解决了以往折射式光管带来的激光和可见光两波段的像面不一致,影响检测精度的问题。(2)设计了特征孔提取机构,通过分划板、固定式金属小孔板和转动式金属小孔板的自身设计型式和三者之间的有效组合,由步进电机带动机构旋转,实现信息场功能特性的测量。
(3)用CCD摄像机摄取观瞄制导仪特定焦距的激光光斑图像,由综合处理器输出辐照度均匀性。同时该系统体积小,结构简单,操作方便,检测精度高,并已通过试验验证,各项性能指标均能满足设计要求。
[1]李松明,黄柯彦,徐荣甫.激光驾束制导仪空间光场性能测量系统[J].兵工学报,2001,22(4):508-511.
LISM,HUANG K Y,XU R F.Ameasuring system for the spatial laserwave field of a laser beam missile guidance system[J].Acta Armamentaria,2001,22(4):508-511.(in Chinese)
[2]李云霞,徐荣甫,刘敬海.激光驾束制导仪性能测试系统研究[J].红外与激光工程,2001,30(6):474-477.
LIY X,XU R F,LIU JH.Research on performance testing solution of laser beam riding guider[J].Infrared Laser Eng.,2001,30(6):474-477.(in Chinese)
[3]江月松,李小路,陈海亭.一种驾束式激光制导仪的基本组成和制导过程[J].光学技术,2005,31(3):354-357.
JIANG Y S,LIX L,CHEN H T.Studies of basic component partand guided process for a certainmodal of surmounted laser-beam guided instrument[J].Opt.Technique,2005,31(3):354-357.(in Chinese)
[4]范宝虎,赵长明,马国强.激光制导技术在现代武器中的应用与发展[J].飞航导弹,2006,(5).
FAN B H,ZHAO CH M,MA G Q.The applications and development of laser guidance system in modern weapons[J].Winged Missiles J.,2006,(5).(in Chinese)
[5]徐飞飞.激光驾束制导的辐射接收技术[D].长春:长春理工大学,2008.
XU F F.Dvelopmentof radiant receiving technology on laser beam-riding guidance[D].Changchun:Journal of Changchun University of Science and Technology,2008.(in Chinese)
Parameter testing system for laser-beam riding guided sighting instrument
LINa1,2,WANG Hong1
(1.Key Laboratory of Optical System Advanced Manufacturing Technology,Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Sciences,Changchun 130033,China;2.Graduate University of Chinese Academy of Sciences,Beijing 100039,China)
In order tomeet the practical needs of laser-beam riding guided sighting instrumentswhich can be tested overall indoor,a parameter solution in the testing system is demonstrated to test the performance parameters.Each part in the parameter testing solution is discussed separately.The system can test the parallel error of the fixed focal length between laser axial and sighting axial,the typical position output characteristic of a controlling field,the biggest parallel error in the whole process of zoom,and the irradiance uniformity of a laser spot by applying the technique of CCD image processing.The system has advantages in simple structure,convenient operation,high accuracy and so on.In the analog test,the solution of the system meets the chal-lenge of practical needs in engineering.
laser-beam riding guided sighting instrument;performance parameter;testing
1674-2915(2010)03-0285-05
TH745
A
2010-03-11;
2010-04-13
李 娜(1982—),女,吉林长春人,硕士研究生,主要从事光学仪器设计方面的研究。E-mail:xingyunlina@sohu.com
王 红(1969—),吉林长春人,博士,副研究员,主要从事工程光学方面的研究。E-mail:wanghong@ciomp.ac.cn
