车载红外探测设备的光机结构设计
2010-05-10孙景旭张星祥任建伟陈长征任建岳
孙景旭,孙 斌,张星祥,任建伟,陈长征,任建岳
(1.中国科学院长春光学精密机械与物理研究所,吉林长春130033;
2.中国科学院研究生院,北京100039)
车载红外探测设备的光机结构设计
孙景旭1,2,孙 斌1,张星祥1,任建伟1,陈长征1,任建岳1
(1.中国科学院长春光学精密机械与物理研究所,吉林长春130033;
2.中国科学院研究生院,北京100039)
为了实现空气质量的实时监测,设计了一种车载红外探测设备的光机结构。该结构采用大孔径、无焦反射式光学系统,即高精度扫描反射镜实现了方位和俯仰0~360°扫描。通过有限元方法对系统进行静力学分析,结果满足光机结构设计要求。用锤击法对样机进行了模态测试,并对车载环境下的设备进行了振动实验。结果表明,光机结构一阶频率为52 Hz,相对于车载环境的12.5 Hz具有足够的动态刚度及结构稳定性,可保证该设备正常工作。
车载红外探测设备;光机结构;实时监测;环境监测;模态;动态刚度
1 引 言
国内开展空气污染远距离检测技术研究起步要比国外晚。70年代末,开展了激光毒剂报警技术探索性研究,研制了激光长程双端测试系统,但未实用化。80年代中后期,经过国内专家全面论证,确定我国以被动红外技术作为主攻方向。目前,随着我国综合国力的不断提高和国民经济的迅猛发展,开展大气污染远距离检测技术研究有着重要的现实意义和科学价值。
国内对气体检测的研究已有一定的历史,也取得了较大的进展。对于研制新型的检测系统,用新的检测方法去研究新的探测器以适应场所的需要是今后的研究热点。目前大气污染检测需要先采集大气样品,然后送到实验室,通过各种方法检测其成分,然后通过固定的大气监测网络才能够实现实时检测。在日益注重空气质量的今天,非常需要灵活的机动设备以实现空气质量的实时检测[1]。
因此,针对远距离空气质量检测,本文对车载红外探测设备进行了研究,设计了该设备的光机结构。考虑设备正常运行过程中,会受到来自车载冲击和振动环境的影响,对系统进行了静力学分析和振动实验。结果表明,该系统具有足够的动态刚度和结构稳定性,可满足红外探测设备的要求。
2 工作原理
气体污染物红外遥测鉴别系统工作原理是,首先通过高精度扫描机构进行二维空间扫描,收集气体污染物发出的红外辐射,进行信息预处理和信号鉴别,然后将结果送入探测器进行光谱分析。显示界面用来指示气体污染物的方位、种类及其含量,为环境监测部门提供准确的气体污染鉴别信息。如图1所示。

图1 工作原理
3 光机结构设计
为保证车载环境下光机结构的安全及位置精度,确保良好成像和获得较高的探测目标能量,探测设备的结构必须具有良好的稳定性。探测设备对光机结构的要求主要体现在:
(1)足够的强度支撑光学系统,并能实现水平和方位0~360°扫描;
(2)足够的刚度来保证系统工作时的定位精度和稳定性;
(3)适应车载的冲击和振动环境,使设备通过光机结构获取适合探测目的的稳定光束。
3.1 光学系统
红外光学系统是红外探测[2]设备的重要组成部分,红外系统的主要作用如下:
(1)收集并接收目标的红外辐射能量;(2)确定目标的方位;
(3)实现大视场捕获目标与成像。
红外探测光学系统主要有折射式、反射式和折反射式[3],其主要特点如表1所示。

表1 红外热成像光学系统Tab.1 Optical system of in frared thermal imaging
对于红外探测设备的光机系统来说,光学系统的选型是十分重要的。为了获得较高的探测能量以及尽量减轻探测设备的体积和重量,本探测设备应用的是反射式物镜中的卡塞格林系统。
卡塞格林系统由抛物面主镜和双曲面次镜组成,次镜位于主镜焦点之内。双曲面镜的一个焦点与抛物面镜的焦点重合,则双曲面的另一个焦点便是整个系统的焦点。这种情况下系统对无穷远轴上点是没有像差的[4]。
该设备的光学系统如图2,它由扫描反射镜、主镜、次镜、三反镜组成。

图2 光学系统结构
杂散光是光学系统中非正常传输光的总称,产生于漏光、透射光学表面的残余反射和镜筒内壁等非光学表面的残余反射,以及由于光学表面质量问题产生的散射光,而红外光学系统还有因系统自身热辐射产生的杂散光。通过各镜面镀金以增加反射率,镜筒设消杂光槽,各压圈设消杂光螺纹及内壁涂消杂光漆,能最大限度地消除杂光。
3.2 瞄准系统
为了对远处目标取景成像,在扫描反射镜正对通光孔位置处放置摄像头。为了同扫描反射镜对准同一目标,该摄像头随着扫描反射镜一起运动,从而与光学系统成像目标完全一致,以便同时获得被测对象的可见光图像与红外图像。该系统结构如图3所示。

图3 瞄准系统
3.3 机械结构
3.3.1 整体结构
空间二维扫描望远系统主要由俯仰扫描部件、方位扫描部件、反射镜部件、隔振部件等组成,各部件之间采用圆柱定位、螺钉紧固的连接方式,以达到方便安装、调试和维修的目的。在保证强度的情况下,除零件设计时进行了轻量化处理外,还采用了镁铝合金材料以进一步减轻整个望远镜的重量。整体结构如图4所示。

图4 整体结构
3.3.2 高精度二维扫描结构
空间二维扫描反射镜是为车载气体污染物红外遥测鉴别系统设计的红外望远镜系统,它的工作波段为1~15μm,主要作用是在进行二维扫描过程中,为探测器收集远距离大面积云团的红外辐射。该设备机械结构部分如图5。
考虑到涡轮蜗杆结构单级传动比大、结构紧凑、传动平稳、无噪声,并且具有良好的自锁性能,整机通过两套涡轮蜗杆结构实现水平和俯仰0~360°扫描,其中涡轮蜗杆1用来保证0~360°俯仰扫描,涡轮蜗杆2用来实现0~360°水平扫描。为了实现360°无限制旋转,该结构采用导电环结构,以便在避免导线的缠绕,实现功能的同时,又能够使布线结构简单可靠。为了得到总视场中出现景物的热图像,必须对景物扫描。红外探测仪器的主要扫描方式为45°平面反射镜在垂直于光轴的平面内旋转扫描(45°镜扫描),平面反射镜在由光轴和仪器高度轴组成的平面内旋转扫描(摇扫),平面反射镜摆动扫描(摆扫),沿轨扫描以及望远镜旋转扫描(望远镜扫描)。此外还有圆锥扫描与光楔扫描等方式。
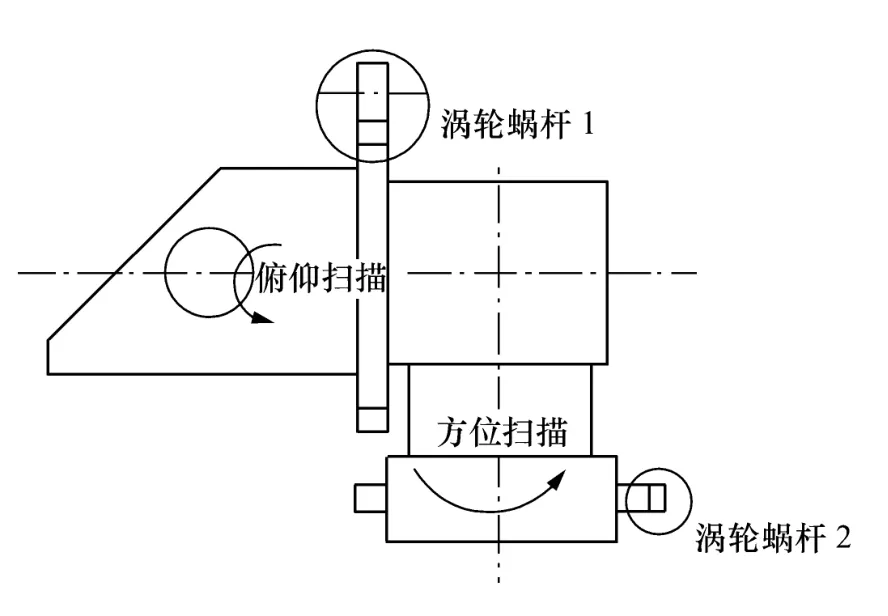
图5 高精度二维扫描结构
本文所述设备是由45°扫描反射镜绕x轴旋转来实现的,这种方式控制简单,运行平稳,扫描镜尺寸小[5]。
3.3.3 隔振结构
车载情况下,设备会受到垂向冲击和侧向冲击载荷,直接使红外探测设备的探测效果降低。为了减缓冲击以及隔振,在设备底部相对距离较大的位置安放了4个具有垂向支撑和稳定作用的隔振器。在设备侧部相对距离较大的位置安放了8个用于设备稳定效用的隔振器。在保证系统动态稳定性的前提下尽量降低系统峰值响应频率,保持强度条件下选用了隔振器,从而使系统在承受最大安全冲击条件下具备隔振性能。在弹性变形过程中,隔振器在空间任意方向动载荷的作用下产生弹性动变形,大量吸收和消耗系统的振动能量。当设备受到大冲击干扰时,隔振器的非线性软化型刚度和大弹性变形能力使系统的冲击能量被大量吸收并延时释放,从而有效地削弱了系统冲击强度。
选用的隔振器具体技术参数如表2。隔振箱结构如图6。
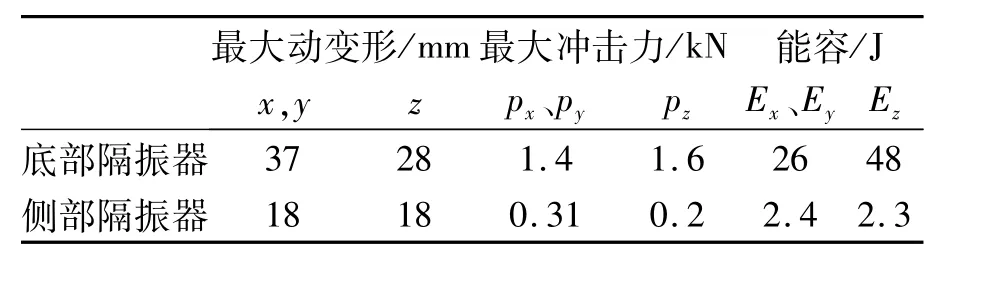
表2 所选隔振器技术参数表Tab.2 Technical data of selected vibration isolators

图6 隔振箱结构
4 结构分析与测试
4.1 静力学分析
通常,人们十分关注主镜的支承方式与结构问题(标准平面镜的支承问题与此类似),其原因是如果支承方式与结构选择不当,会引起反射镜变形,最终大大降低望远镜的性能。
引起变形的原因是:
(1)反射镜自身的重力。反射镜在结构支承下,由于自重作用产生变形,引起高精度工作表面(反射面)变形,使面形性能下降;
(2)支承方式与结构的影响。设备的壳体结构在外部因素(如压力、温度、结构安装等)作用下会产生变形和内应力,并通过支承结构传递到主镜上,引起主镜偏转和变形,使设备性能下降[6]。
光机结构有限元模型如图7。结合标准球面拟合法计算光机结构中主次镜在自重以及均匀温升下镜面PV值与RMS值,结果数据如表3。

图7 光机系统有限元模型

表3 系统主次镜在Y向自重及5℃温升作用下的镜面面形(nm)Tab.3 Surface shapes of primary and secondary m irrors under the action of Y-weight and 5℃temperature rise(nm)
从表3可以看出,在自重和5℃温升下,光机结构中红外望远镜组件的主次镜面形精度完全符合指标要求。
4.2 振动特性
该设备在进行红外探测过程中,车载环境下的冲击和振动载荷会直接影响到设备光机结构稳定性,为了维持设备正常运行,对该结构进行振动特性[7]分析是很有必要的。
车载红外探测设备在进行红外探测过程中,由于地面的不平整使设备受到的地面随机激励是其所承受的重要动力学载荷。红外探测设备可能会因此产生过度振动从而导致设备结构破坏或发生动态疲劳破坏,使红外探测设备发生功能损坏,导致红外探测失败。所以,有必要对车载红外探测设备进行振动分析,获得红外探测设备所受的冲击载荷响应,从而估算出红外探测设备所受的疲劳损伤,使红外探测设备获得理想的红外图像,更好地应用于空气质量的检测。
所用光学系统属于同轴系统,其各反射镜定位、安装较离轴光学系统[8]具有较大的优越性,其次镜通常属于中小型反射镜,一般通过杆系结构与仪器本体相联接并固定。这些反射镜的面形精度通常可以满足光学系统成像的要求,但由于杆及杆系的结构特点,以及杆的材料选取,次镜结构系统的刚度很低,动态稳定性有可能达不到设计要求。为保证红外探测器的成像质量,要求这种系统结构必须具有良好的动态刚度,使红外探测器工作时,在外界机械扰动下不抖动、不颤振、不与载体产生共振、不失稳,所以在采用杆系结构作为支撑方案的探测器中,除保证杆结构具有良好的稳定性外,还必须保证其具有较高的固有频率。为使其固有频率避开外界激励频率,有必要对系统动态稳定性进行分析。
(1)模态测试
模态测试系统如图8。

图8 模态测试系统
结果如图9所示。
(2)车载条件下具有隔振系统的红外探测设备的振动加速度响应,如图10、图11、图12所示。
通过对具有隔振系统的车载探测器整机的振动试验,可以得出如下结果:
探测器一阶固有频率在52 Hz,相对车载环境和外界干扰频率而言,具有足够的动态刚度,可以保证红外探测器获得稳定光束,确保设备的正常运行。

图9 锤击法模态测试结果

图10 x向加速度响应

图11 y向加速度响应

图12 z向加速度响应
5 结 论
本文设计了一种车载红外探测设备的光机结构,采用高精度扫描反射镜实现了水平和俯仰0~360°的扫描,满足了红外探测设备的要求。对该结构中的光学系统部分做了详细说明,利用有限元方法进行静力学分析,得出的结果说明主次镜面形完全满足光学设计的要求;通过振动特性的分析,提出了一种解决方案,即在设备的底部和侧部加载隔振器,满足车载环境的要求,从而可以保证红外设备的正常探测工作。
[1]李兰,沈光地,邹德恕,等.新型室温微机械红外探测器原理与设计[J].光电工程,2004,31(2):34-36.LIL,SH G D,ZOU D SH,etal..Principle and design of IR detector for a novel room temperature MEMS[J].Opto-electronic Eng.,2004,31(2):34-36.(in Chinese)
[2]张伟,曹移明,丛明煜,等.基于杂波模型的天基目标红外探测波段选择[J].光学精密工程,2010,18(2):341-348.ZHANGW,CAO Y M,CONGM Y,etal..Band selection for space-based infrared target detection using background cluttermodel[J].Opt.Precision Eng.,2010,18(2):341-348.
[3]徐之海,李奇.现代成像系统[M].北京:国防工业出版社,2001.XU ZH H,LIQ.Modern Imaging Systems[M].Beijing:National Defense Industry Press,2001.(in Chinese)
[4]陈海清.现代实用光学系统[M].武汉:华中科技大学出版社,2003.CHEN H Q.Modern Practical Optical System[M].Wuhan:Huazhong University of Science and Technology Press,2003.(in Chinese)
[5]姜景山.空间科学与应用[M].北京:科学出版社,2001.JIANG JSH.Space Science and Application[M].Beijing:Science Press,2001.(in Chinese)
[6]廖知春.平行光管反射镜的支承结构[J].航天返回与遥感,2003,24(1):19-23.LIAO ZH CH.Themounting structure of reflectionmirror in collimater[J].Spacecraft Recovery&Remote Sensing,2003,24(1):19-23.(in Chinese)
[7]邹春平,陈端石,华宏星.船舶结构振动特性研究[J].船舶力学,2003,7(2):102-115.ZOU CH P,CHEN D SH,HUA H X.Study on structural vibration charateristics of ship[J].J.Ship Mechanics,2003,7(2):102-115.(in ChineseS)
[8]马军,何煦,居波,等.泰曼-格林型静态便携式干涉仪的设计[J].光学精密工程,2008,17(12):2524-2530.MA J,HE X,JU B,et al..Design of portable static state Tyman-Green interferometer[J].Opt.and Precision Eng.,2008,17(12):2524-2530.(in Chinese)
Design of optical and mechanical structure of on-truck infrared detection equipment
SUN Jing-xu1,2,SUN Bin1,ZHANG Xing-xiang1,REN Jian-wei1,CHEN Chang-zheng1,REN Jian-yue1
(1.Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Sciences,Changchun 130033,China;
2.Graduate University of Chinese Academy of Sciences,Beijing 100039,China)
In order to test the air quality in real-time,an optical andmechanical structure of on-truck infrared detection equipment is designed.Using large aperture optical system,high precision scanning structure and unfocus reflecting telescope,the system achieves0-360°scanning in orientation and pitching.The structural static analysis of the system is performed using finite elementmethod and the resultsmeet the optical and mechanical design requirements.A modal test is done by hammer beatmethod and a vibration test is carried out under the on-truck environment.Comparing the two results above,the first-order frequency of the optical and mechanical structure is 52 Hz,which has sufficient dynamic stiffness corresponding to the 12.5 Hz in the ontruck environment and can ensure the stable operation of infrared detection devices.
on-truck infrared detection equipment;optical and mechanical structure;real-time test;environmental test;mode;dynamic stiffness
国家863高技术研究发展计划资助项目(863-2-5-1-13B)
TN219;X831
A
1674-2915(2010)04-0397-07
2010-04-17;
2010-06-23
孙景旭(1984—),男,山东聊城人,硕士研究生,主要从事空间光学遥感器机械结构设计及CAD/CAE工程分析等方面的研究。Email:sunjingxu2004@163.com
任建岳(1952—),男,吉林长春人,研究员,博士生导师,主要从事光机结构总体设计及有限元分析等方面的研究。
张星祥(1977—),男,云南大理人,副研究员,主要从事空间光机电一体化等方面的研究。
